00195796-0102_UM_D4_JA.pdf - 第99页
ユーザーマニュアル SIPLACE D4 3 マシンのテクニカルデータ ソフトウエアバージョン SR.605.xx 以降 2008 年 7 月版 3.5 実装ヘッド 99 3.5.1.3 バキュームポンプによる運転 12 セグメントリボルバヘッドは、さらに効率的な バキューム発生のためにバキュームポンプに よる運転に切り替えることがで きます ( ページ 245 のセクション 6.12 参照 )。 プログラム済み圧力段 1 2 3 4 …
3 マシンのテクニカルデータ ユーザーマニュアル SIPLACE D4
3.5 実装ヘッド ソフトウエアバージョン SR.605.xx 以降 2008 年 7 月版
98
基板に実装されます。その後、部品は静かに、正確にブローオフエアーにより基板に実装され
ます。
SIPLACE リボルバヘッドの 12 個のノズルは、従来のチップシュータと対照的に、水平軸の周り
に回転します。これは、単にスペースを節約するだけではありません。直径が小さいために、
従来のチップシュータに比較して、はるかに小さな遠心力になります。これにより、部品移動
中に部品がずれることがなくなります。
他にも利点があります。リボルバヘッドのサイクルタイムは、すべての部品に対して同一です。
つまり、実装速度は、部品のサイズによって異ならないということです。
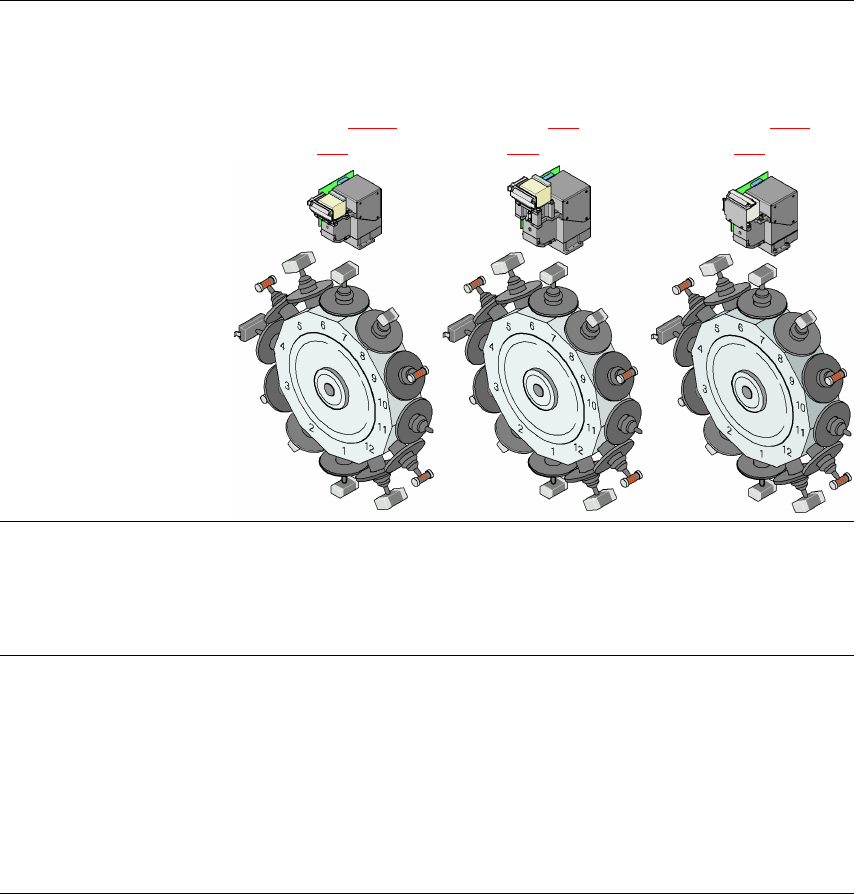
3.5.1.2 テクニカルデータ
3
部品カメラ、タイプ
28、18 x 18、デジタル
付き 12 セグメントリボ
ルバヘッド
( セクション 3.8.1
の
ページ 116
参照 )
部品カメラ、タイプ 29、
27 x 27、デジタル付き
12 セグメントリボルバ
ヘッド
( セクション 6.9
のペー
ジ 243
参照 )
部品カメラ、タイプ 38、
16 x 16、デジタル付き
12 セグメントリボルバ
ヘッド
( セクション 6.10
の
ページ 244
参照 )
対象部品
a
0402 から PLCC44、BGA、
μBGA、フリップチップ、
TSOP、QFP、SO から
SO32、DRAM
0201(0603mm)
b
からフ
リップチップ、ベアダ
イ、PLCC44、BGA、
μBGA、TSOP、QFP、SO か
ら SO32、DRAM
01005
c
から 16 x 16 mm
部品仕様
最大高さ
最小リードピッチ
最小リード幅
最小ボールピッチ
最小ボール径
最小寸法
最大寸法
最大重量
6 mm
0.5 mm
0.2 mm
0.35 mm
0.2 mm
1.0 x 0.5 mm
18.7 x 18.7 mm
2 g
6 mm
0.3 mm
0.15 mm
0.25 mm
0.14 mm
0.6 x 0.3 mm
b
18.7 x 18.7 mm
2 g
6 mm
0.25 mm
0.1 mm
0.25 mm
0.14 mm
0.4 x 0.2 mm
16 x 16 mm
2 g
ユーザーマニュアル SIPLACE D4 3 マシンのテクニカルデータ
ソフトウエアバージョン SR.605.xx 以降 2008 年 7 月版 3.5 実装ヘッド
99
3.5.1.3 バキュームポンプによる運転
12 セグメントリボルバヘッドは、さらに効率的なバキューム発生のためにバキュームポンプに
よる運転に切り替えることができます ( ページ 245
のセクション 6.12 参照 )。
プログラム済み圧力段
1
2
3
4
5
プログラム済み着地圧力 [N]
2.4 ± 0.5
2.4 ± 0.5
3 + 1
4 + 1
5 + 1
ノズルタイプ 9xx 9xx 9xx
X/Y 位置決め精度
d
± 50 μm/3σ、 ± 67
μm/4σ
± 50 μm/3σ、± 67
μm/4σ
± 50 µ m/3σ、± 67 µ m/
4σ
回転精度 ± 0.53°/3σ、 ± 0.71
°/4σ
± 0.53°/3σ、 ± 0.71
°/4σ
± 0.53°/3σ、± 0.71
°/4σ
部品範囲 98% 98.5% 96%
部品カメラタイプ 28 29 38
照明レベル 5 5 5
可能な照明レベル設定
256
5
256
5
256
5
a) 実装できる対象部品は、パッド形状、カスタマ専用の規格、梱包荷姿許容誤差によっても影響を受けるこ
とにご留意ください。
b) 0201 部品用拡張オプション
c) 01005 部品用拡張オプション
d) 精度の値は、ベンダー中立の IPC 規格を使用して測定されました。
3 マシンのテクニカルデータ ユーザーマニュアル SIPLACE D4
3.6 X-Y 軸システム ソフトウエアバージョン SR.605.xx 以降 2008 年 7 月版
100
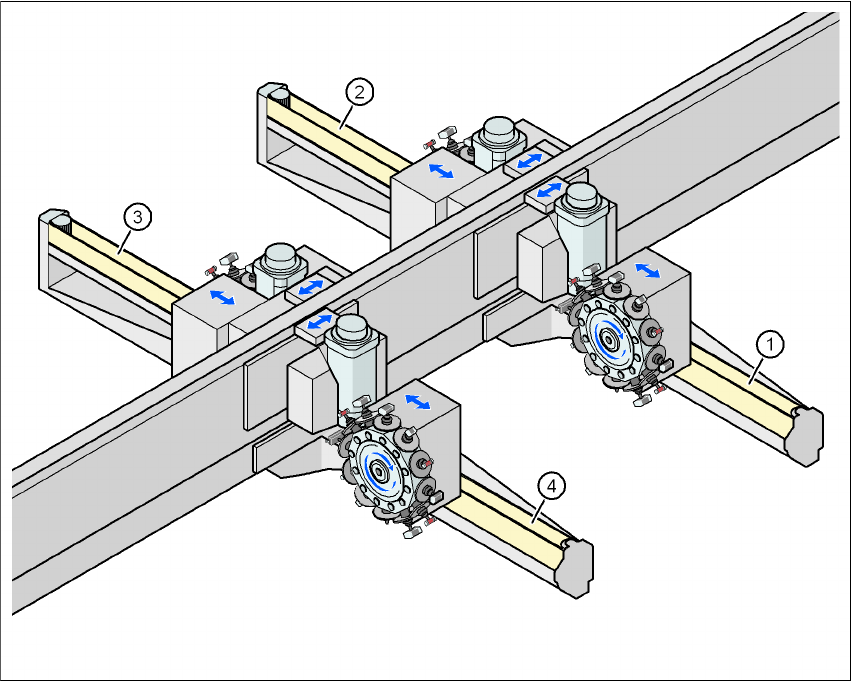
3.6 X-Y 軸システム
3.6.1 X-Y 軸の位置
3
図 3.6 - 1 X-Y 軸の位置
(1) X-Y 軸 1
(2) X-Y 軸 2
(3) X-Y 軸 3
(4) X-Y 軸 4
X-Y 軸システムは、二つの機能グループから構成されています。
– X 軸および
–Y軸
実装エリア 1
実装エリア 2