SG_FSE_SiplaceHF_HF3_00193900-05_de.pdf - 第103页
1 - 35 S tudent Guide SIPLACE HF/HF3 Ausgabe 09/2005 3 Kommunikation und S teuerung 35 3.4 Achsansteuerung 3.4.1 Positionsmesssystem 3.4.1.1 Spursig nale und Nullimpulssignal der Ac hse Die Achssysteme bestehen aus folge…
1 - 35
Student Guide SIPLACE HF/HF3
Ausgabe 09/2005 3 Kommunikation und Steuerung
35
3.4 Achsansteuerung
3.4.1 Positionsmesssystem
3.4.1.1 Spursignale und Nullimpulssignal der Achse
Die Achssysteme bestehen aus folgenden Teilen.
– Achscontroller Hauptplatine mit VC 3 Controllern
–Servoverstärker
– Motor
– Positionsmesssystem bestehend aus Inkrementalmassstab und -encoder
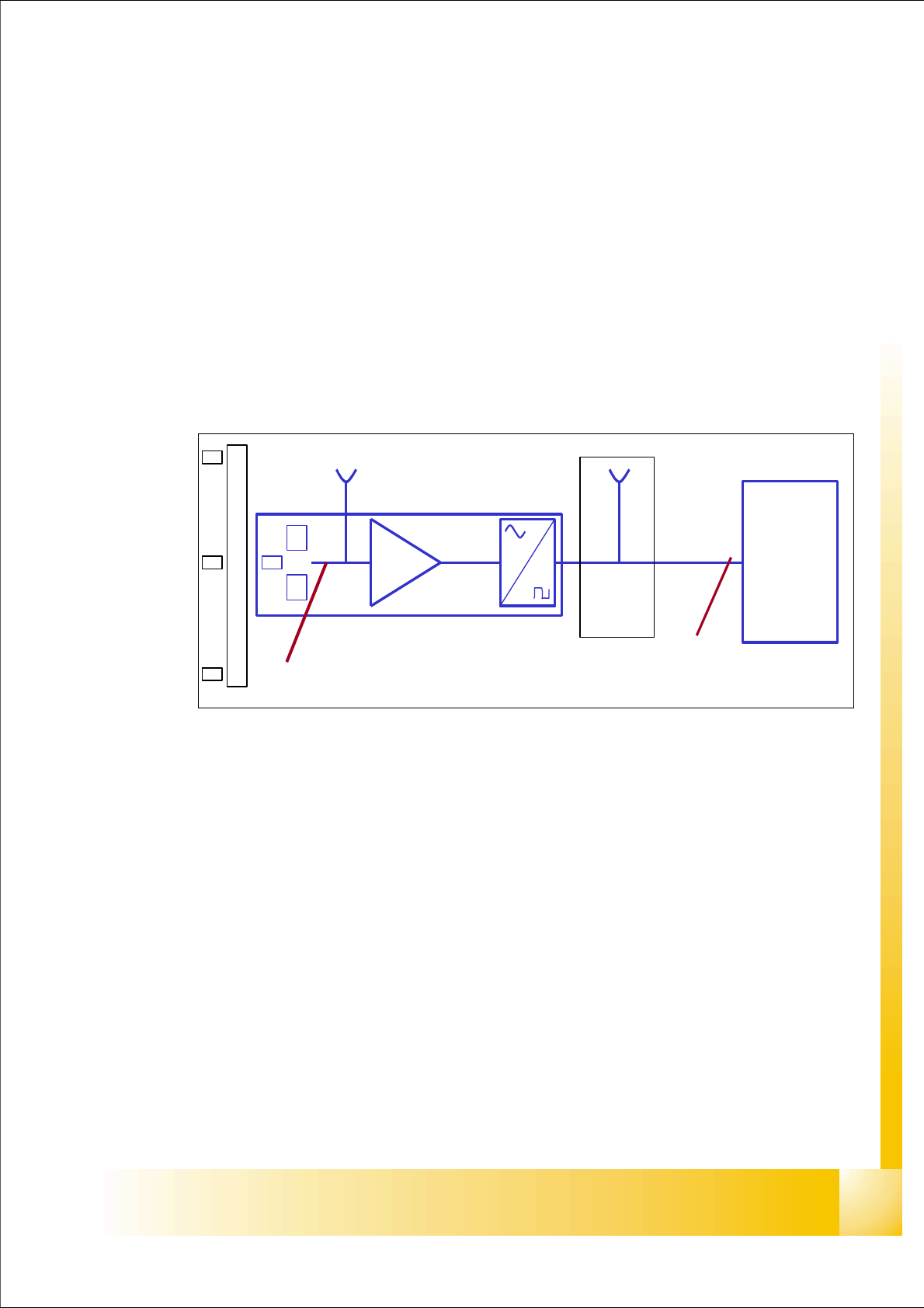
Fig. 3.4 - 1 Prinzipschaltkreis für Positionsmesssysteme
Legende
Das Achssteuerungssystem ’mit geschlossenem Positionsregelkreis’ ermitteln die Achsposition
direkt an der bewegten Achsmechanik. Das Positionsmesssystem erzeugt analoge Spur- und
Nullimpulssignale bei einer Bewegung über den Massstab. Ein Verstärker, eine (Frequenz)Ver-
vielfacherschaltung und ein Signalformer ist im Verstärkergehäuse integriert. Ein Teststecker für
digitale Signale ist normalerweise auf dem nächsten ’Interface board’ angebracht - oder aber die
digitalen Signale können am Spur A / B und Nullimpulsausgang des ’SIPLACE Axis Tester’ ge-
messen werden.
An der HF-Maschine sind die Spursignale die einzige Rückkoppelschleife in allen Achsansteuer-
systemen.
(1) Inkrementalmassstab mit Nullimpulsen (2) Inkrementalgeber (encoder) für Spur A- /
B- und Nullimpulssignale (O-puls.)
(3) Analog Signalausgang und Verstärker (4) Elektronische Signalmultiplikation und
Signaldigitalisierung
(5) Teststecker digital Signale (6) Achscontroller
A
B
A /A
B /B
0 -impuls .
/0-impuls .
0 -impuls
1
2
3
4
5
6
1 - 36
Student Guide SIPLACE HF/HF3
3 Kommunikation und Steuerung Ausgabe 09/2005
36
Dies bedeutet jeder Fehler der Spursignalerkennung beeinflußt die Achssteuerung; die Portalach-
sen werden bei erkennen eines Spursignalfehler sofort gestoppt; die Kopfachsen beenden die ak-
tuelle Positionierung bei erkennen eines Spursignalfehlers.
Die Achsposition wird mit einem Positionszähler auf dem Achscontroller mitgezählt. Die Bewe-
gungsrichtung der Mechanik wird durch die Phasenlage der beiden Spursignale erkannt. (ein vor-
eilendes Spur A-signal heißt Bewegung nach rechts; ein voreilendes Spur B-signal - heißt
Bewegung nach links).
Um das Inkrementalsystem auch für unsere hohe Auflösung robust zu gestalten werden die ana-
logen Signale elektronisch vervielfacht.
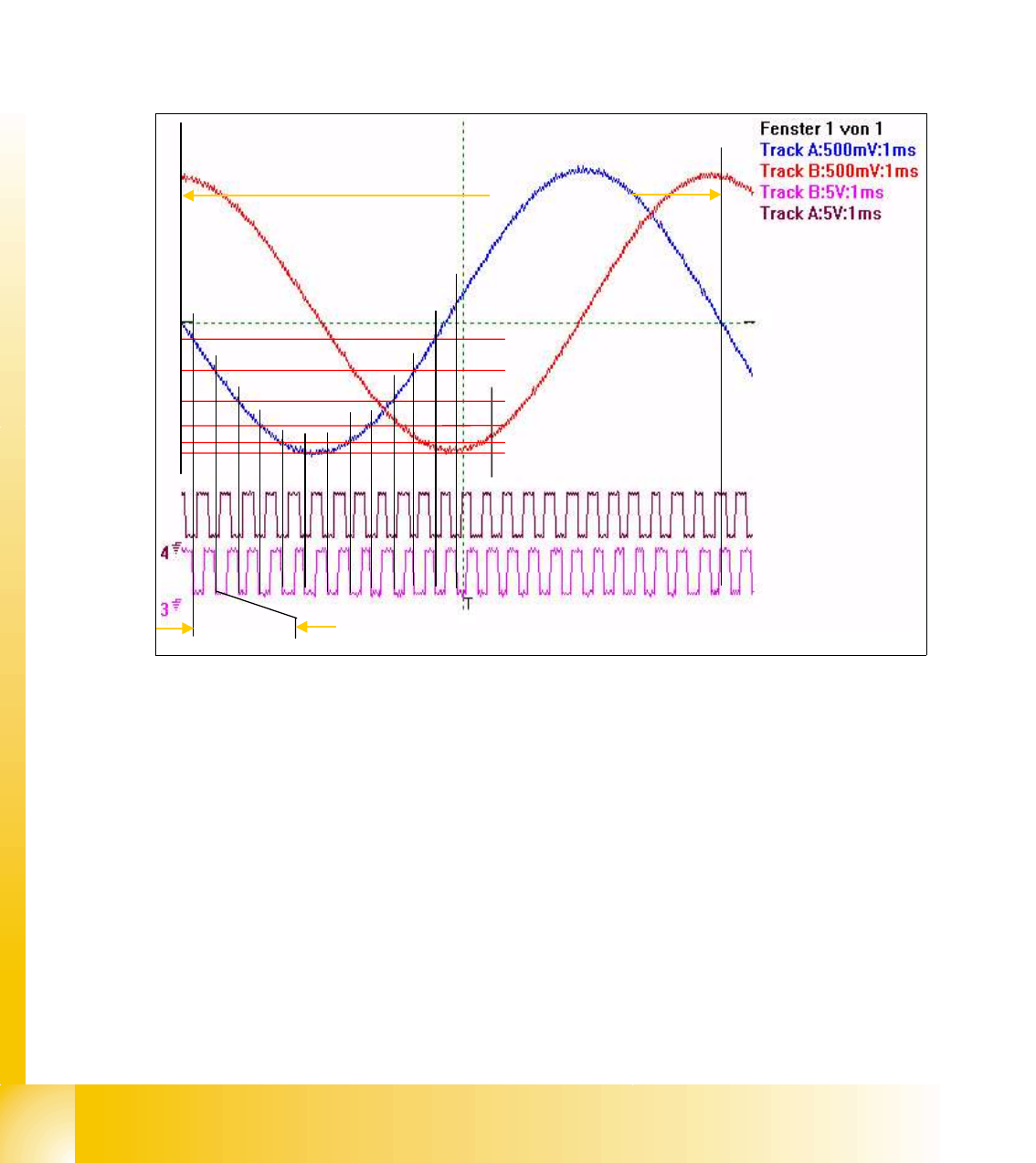
Fig. 3.4 - 2 Prinzipielle Signalvervielfachung der analogen Spursignale einer Portalachse
Legend
Die Signalvervielfachung läßt sich als ’Schmitt Trigger’schaltung vorstellen. Beim Signalvergleich
des analogen und digitalen Signale der Achsen erkennt man eine Signalvervielfachung von 25
(see Fig. 3.4 - 2), 10 oder nur 1.
Die Spursignale der C&P-Kopfachsen können nur als digitale Signale gemessen werden. Die ana-
logen Signale werden direkt im Gebergehäuse gewandelt ohne daß ein Testanschluß für die ana-
logen Signale bereit gestellt ist.
(1) Analoges Spur A-signal Inkrementalgeber (2) Analoges Spur B-signal Inkrementalgeber
(3) Digitales Spur A-signal am Teststecker (4) Digitales Spur B-signal am Teststecker
(5) Periodendauer des analogen Spursignals (6) Periodendauer des digitalen Spursignals
1
2
5
6