SG_FSE_SiplaceHF_HF3_00193900-05_de.pdf - 第212页
1 - 18 S tudent Guide SIPLACE HF/HF3 6 Collect&Place-Kopf / DLM2 Ausgabe 09/2005 18 6.2.1 Referenzlauf C&P-Kop f Abb. 6.2 - 1 Allgemeiner Referenzlauf C&P-Kopf Option: B E Sensor
1 - 17
Student Guide SIPLACE HF/HF3
Ausgabe 09/2005 6 Collect&Place-Kopf / DLM2
17
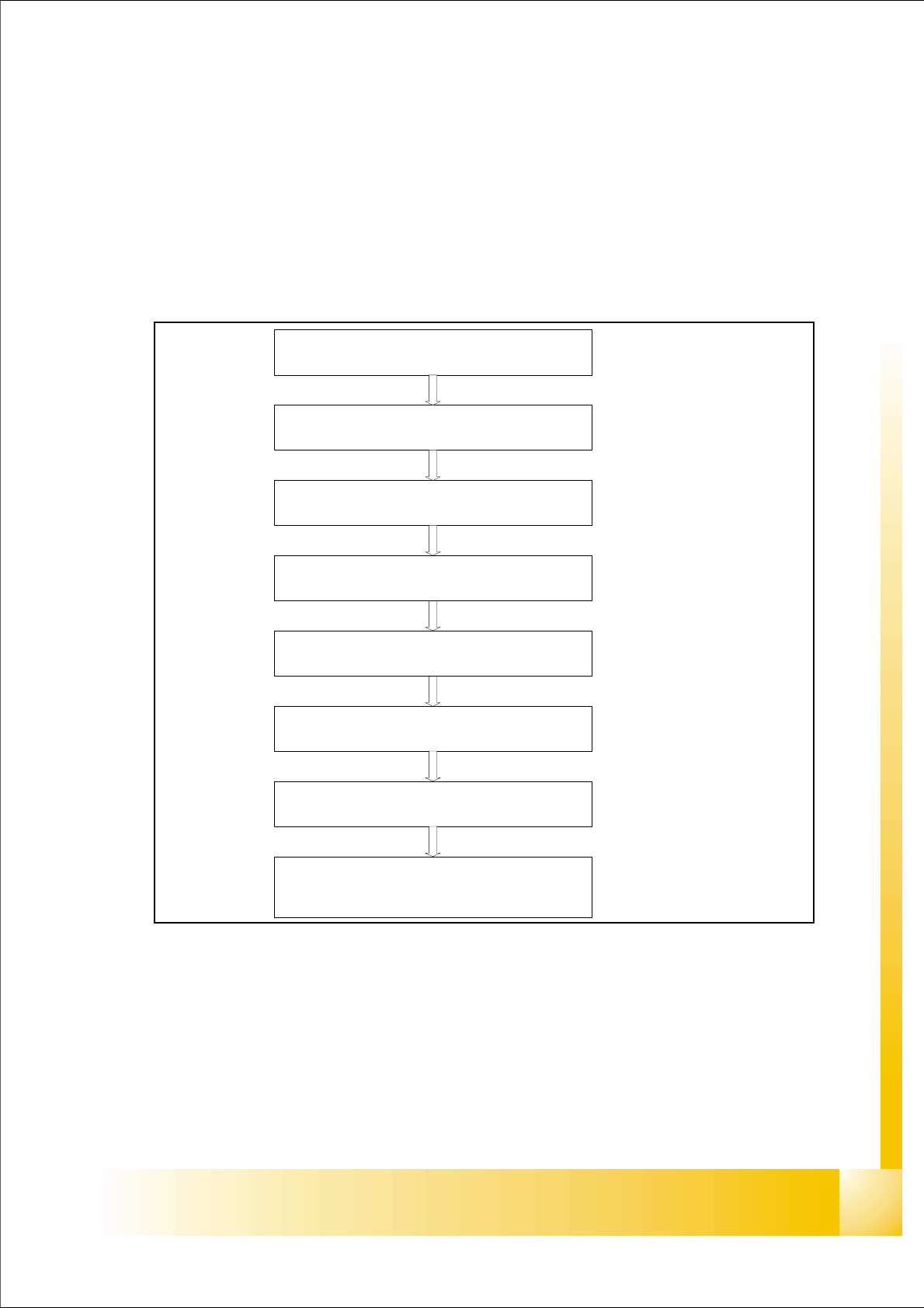
6.2 Referenzlauf
Der 6- und 12-C&P Kopf hat 3 Achsen, die Z-Achse, Stern-Achse und DP-Achse sowie die X- und
Y-Achsen für das Portal. Der Twin Head besteht aus zwei Achsen, einer Z-Achse für Auf- und Ab-
wärtsbewegung und eine D-Achse für die Drehung. Vor dem Start der Produktion müssen alle
Achsen initialisiert werden, damit die Steuerung erkennt, wo deren tatsächliche mechanische Po-
sition ist.
Allgemeiner Ablauf 6
– Dieses Verfahren hinsichtlich des Referenzlaufs entspricht dem beim 6-Pipetten- und 12-Pi-
petten-C&P-Kopf des Typs DLM2.
– Der Referenzlauf beginnt mit der Initialisierung aller Kopf-Schrittmotoren. Dadurch wird ermög-
licht, dass die Kopfachse zuerst durch Verfahren zu deren Nullimpulsen und dann zu den Null-
punktkorrekturwerten die Referenzposition findet.
– Bei der Siplace HF Maschine fahren beide Köpfe (C&P-Kopf, Twin Head) und Portale gleich-
zeitig in Referenzposition .
Start-Taste betätigen
Referenzlauf der X/Y-Achsen
Initialisiert alle Kopfachsen (C&P,Twin Head)
Die X-Y-Achsen fahren den C&P Kopf und den
Twin Head zur Abwurfposition
Vakuum-Messung für alle Segmente
Die X-Y-Achsen fahren den C&P Kopf und den
Twin Head zur festen Transportseite.
Für alle Segmente wird die Pipettenhöhe vermessen.
Referenzlauf des Transports
Die X-Y-Achsen fahren zur Warteposition
1 - 19
Student Guide SIPLACE HF/HF3
Ausgabe 09/2005 6 Collect&Place-Kopf / DLM2
19
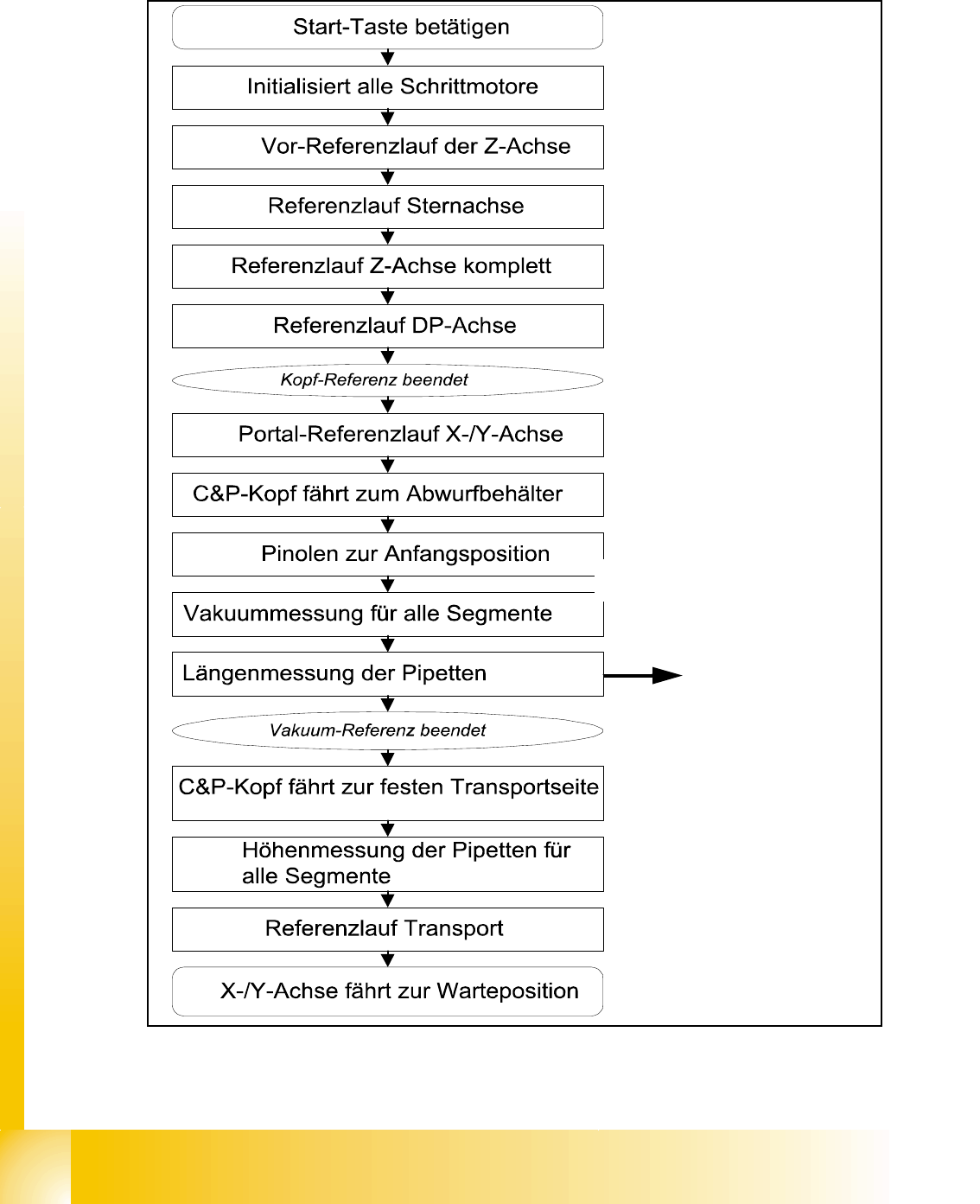
6.2.2 Initialisierung des Ventilstellantriebs Abhol-/Bestück- und Abwurfposition
Die Aufgabe des Schrittmotors ist, mit Hilfe einer außenmittigen Bewegung den Stößel in Gang
zu setzen, der das Vakuum einschaltet und das Abholen des Bauelements ermöglicht. Beim Be-
stücken des Bauelements wird der Stößel nochmals betätigt, um die Pipette zu schließen, damit
für das Bestücken Blasluft an der Pipette vorhanden ist.
Beim Abwurf des Bauelements schaltet der Stößel die Blasluft ein und ermöglicht den Abwurf des
Bauelements. Danach wird wieder das Vakuum eingeschaltet.
Abb. 6.2 - 2 Initialisierung des Stellantriebs an Abhol-/Bestück- und Auswurfposition
Legende:
(3) Homeposition, Initialisierungsposition. Verfahren der Stern-Achse freigeben. Zeichnung zeigt
2 mögliche Positionen des Stößels.
(4) 2a. schaltet auf Vakuum, Vakuumwert "Pipette geöffnet"
2b. schaltet auf Blasluft, Vakuumwert "Pipette geschlossen"
(5) Position entgegengesetzt zur Ausgangsposition. Verfahren der Stern-Achse freigeben.
– Der Schrittmotor des Ventilstellantriebs dreht auf Homeposition. Der Schrittmotor verfährt und
die Lichtschranke auf der Kurvenscheibe legt die Endemeldung fest.
– Wegen der speziellen Form der Kurvenscheibe kann der Schrittmotor die Homeposition (1) er-
kennen.
1
2a
2b
3