SG_FSE_SiplaceHF_HF3_00193900-05_de.pdf - 第224页
1 - 30 S tudent Guide SIPLACE HF/HF3 6 Collect&Place-Kopf / DLM2 Ausgabe 09/2005 30 6.3.2 12-Pipetten-Collect & Pl ace-Kop f in Grundstellung 15 ° Abb. 6.3 - 2 12-Pipetten-Collect & Place-Kopf in Grundstellun…
1 - 29
Student Guide SIPLACE HF/HF3
Ausgabe 09/2005 6 Collect&Place-Kopf / DLM2
29
6.3 Bestückablauf
Abhol-und Bestückzyklus des Collect & Place-Kopf (DLM2) 6
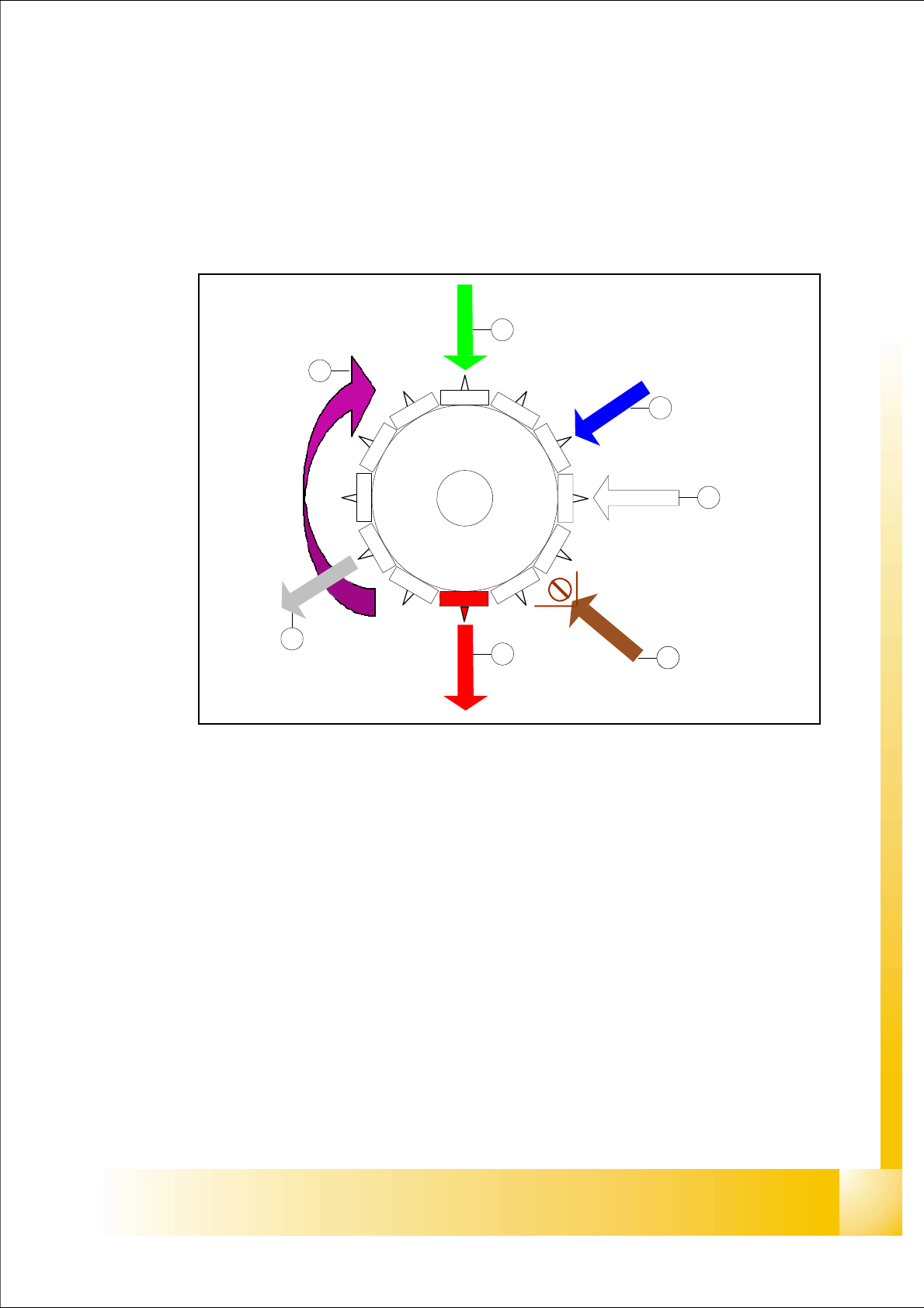
6.3.1 Arbeitspositionen am Bestückkopf
Abb. 6.3 - 1 Arbeitspositionen am Bestückkopf
Legende
(1) Optische Zentrierung
(2) Drehstation
(3) Serviceposition für Segment: Überprüfen/ entfernen Pipetten.
Entfernen der Pinolen (speziell beim 6er Kopf) auf der anderen Seite
(4) Abhol-/Bestückstation und Abwurfposition
(5) Abwurfposition bei S27HM und HS 60
(6) Arbeitsrichtung
(7) Position der BE-Sensor-Option
12
1
1
1
0
9
8
7
6
5
1
2
3
4
1
2
3
4
5
6
37
1 - 30
Student Guide SIPLACE HF/HF3
6 Collect&Place-Kopf / DLM2 Ausgabe 09/2005
30
6.3.2 12-Pipetten-Collect & Place-Kopf in Grundstellung 15
°
Abb. 6.3 - 2 12-Pipetten-Collect & Place-Kopf in Grundstellung 15°
Dies ist die Grundstellung des 12-Pipetten-Collect & Place-Kopfes.
Wenn X- und Y-Achse in Warteposition sind, wird die Sternachse in die Grundstellung gedreht.
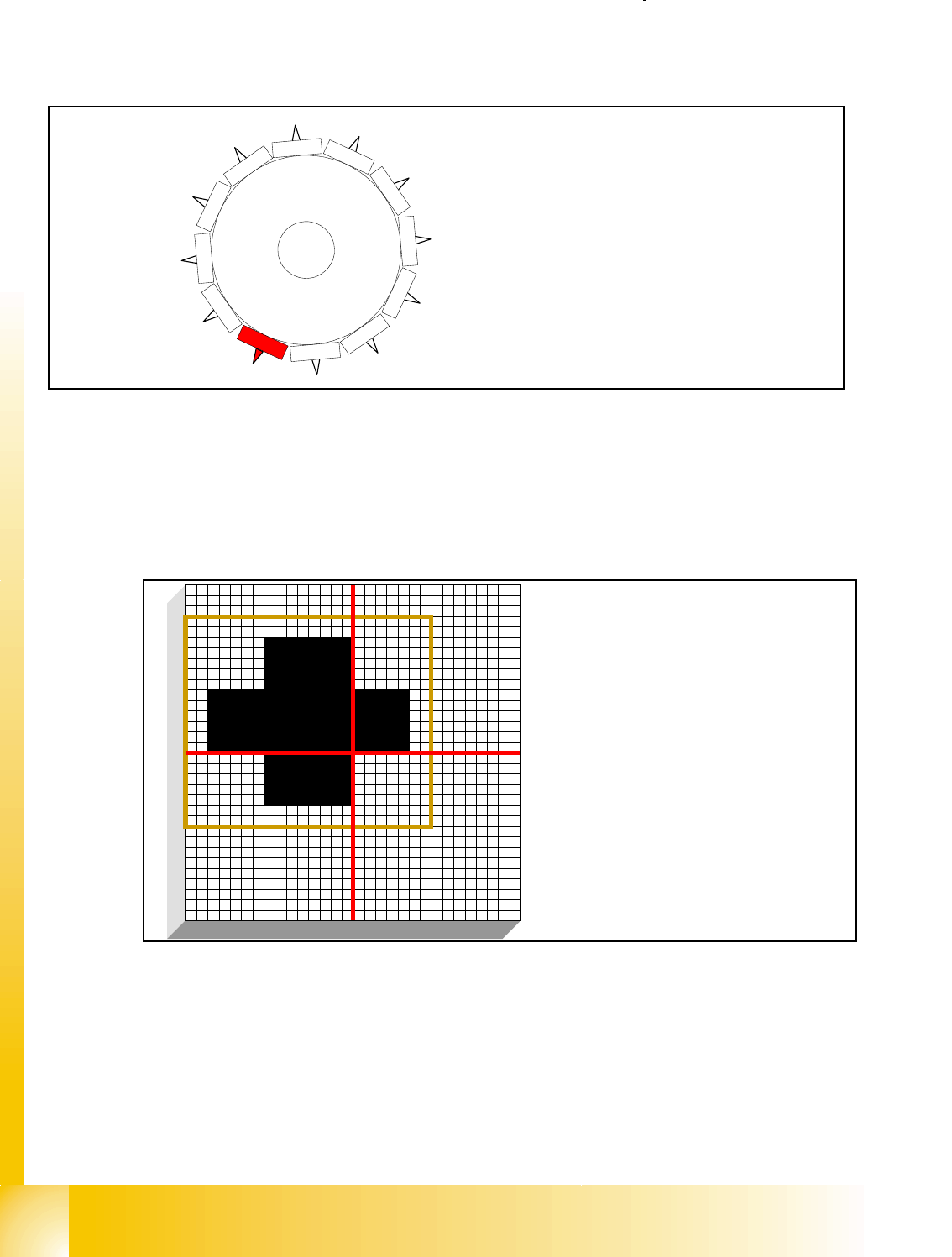
6.3.3 LP-Lageerkennungsfahrt zur Sollposition der Leiterplatte
Abb. 6.3 - 3 LP-Lageerkennungsfahrt zur Sollposition der Leiterplatte
An dieser Sollposition wird eine Passmarke erwartet. Die LP-Kamera bewegt sich aus der Warte-
position zu dieser Passmarken-Position.
– Die LP-Lageerkennung wird durchgeführt, bevor das 1. Bauelement aufgenommen wird.
– Die Portalachsen bewegen die LP-Kamera zu der theoretischen Passmarken-Position. Die
Kamera macht eine Aufnahme der 1. Passmarke. Das Visionsystem errechnet die Mittenposi-
tion.
Sternposition
Digit: 15000
Winkel 15°
1° entspricht 1000 Digits
1
2
1
1
1
0
9
8
7
6
5
1
2
3
4
1 - 31
Student Guide SIPLACE HF/HF3
Ausgabe 09/2005 6 Collect&Place-Kopf / DLM2
31
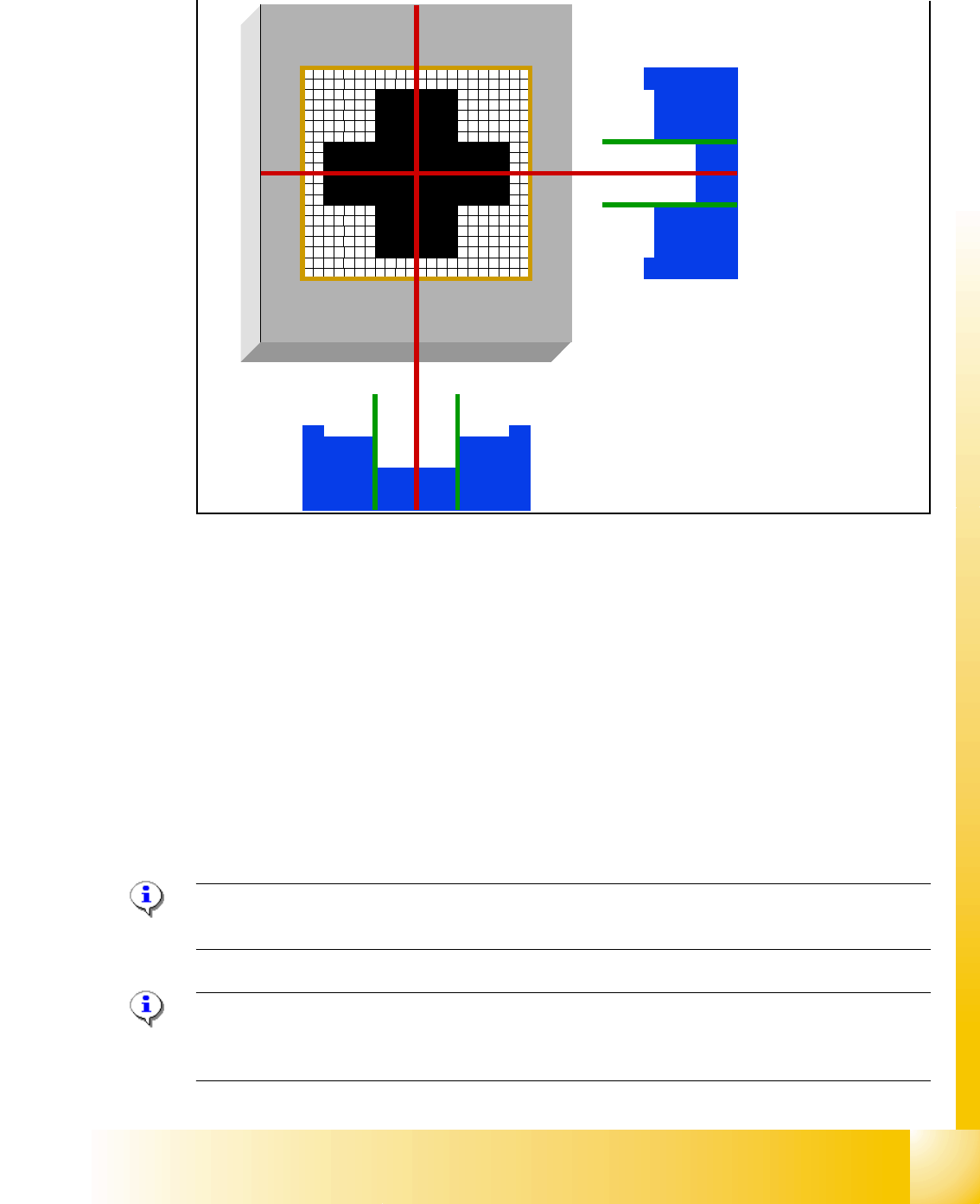
6.3.4 LP-Lageerkennung - Zentrierung der LP-Passmarken
Abb. 6.3 - 4 LP-Lageerkennung - Zentrierung der LP-Passmarken
Die zentrierte Passmarke definiert jetzt die tatsächliche Position der Leiterplatte.
– Die Kamera macht eine Aufnahme der 2. Passmarke und das Visionsystem errechnet die Mit-
tenposition dieses Bildes.
– Die 2. Berechnung ist die Abweichung zwischen der Soll- und der errechneten Passmarken-
Position.
– Alle LP-Passmarken werden optisch mit diesem Verfahren zentriert.
– Diese Daten werden an die Maschinensteuerung geschickt.
– Korrigierte Werte werden für die X-, Y- und die Winkelposition der Leiterplatte errechnet.
– Jetzt bewegen die Portalachsen den Bestückkopf zur ersten Abholposition.
Hinweis: Werden Synthetische Marken benutzt, ändert dies nicht den beschriebenen Ablauf;
jedoch wird die Inkpunkterkennung nach der Markenerkennung durchgeführt. 6
Hinweis:
Die LP-Lageerkennung wird ab SW 505 mit beiden Portalen eines Bestückbereichs durchge-
führt. 6