SG_FSE_SiplaceHF_HF3_00193900-05_de.pdf - 第226页
1 - 32 S tudent Guide SIPLACE HF/HF3 6 Collect&Place-Kopf / DLM2 Ausgabe 09/2005 32 6.3.5 V orbereiten von Pipette 1 zum Abholwinkel (0° oder 90°) Abb. 6.3 - 5 Drehung von Pipette 1 zum Abholwinkel (0° oder 90°) Die …
1 - 31
Student Guide SIPLACE HF/HF3
Ausgabe 09/2005 6 Collect&Place-Kopf / DLM2
31
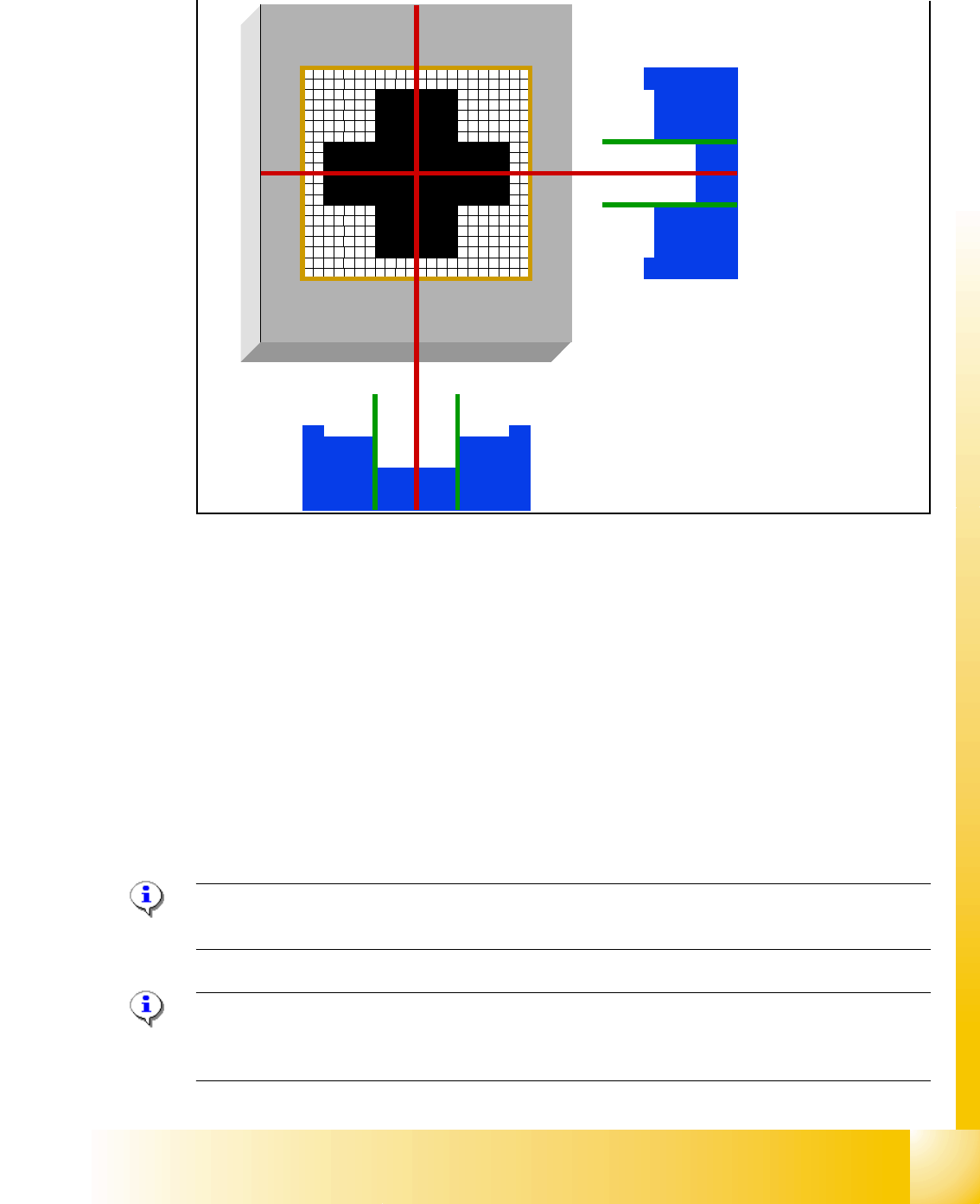
6.3.4 LP-Lageerkennung - Zentrierung der LP-Passmarken
Abb. 6.3 - 4 LP-Lageerkennung - Zentrierung der LP-Passmarken
Die zentrierte Passmarke definiert jetzt die tatsächliche Position der Leiterplatte.
– Die Kamera macht eine Aufnahme der 2. Passmarke und das Visionsystem errechnet die Mit-
tenposition dieses Bildes.
– Die 2. Berechnung ist die Abweichung zwischen der Soll- und der errechneten Passmarken-
Position.
– Alle LP-Passmarken werden optisch mit diesem Verfahren zentriert.
– Diese Daten werden an die Maschinensteuerung geschickt.
– Korrigierte Werte werden für die X-, Y- und die Winkelposition der Leiterplatte errechnet.
– Jetzt bewegen die Portalachsen den Bestückkopf zur ersten Abholposition.
Hinweis: Werden Synthetische Marken benutzt, ändert dies nicht den beschriebenen Ablauf;
jedoch wird die Inkpunkterkennung nach der Markenerkennung durchgeführt. 6
Hinweis:
Die LP-Lageerkennung wird ab SW 505 mit beiden Portalen eines Bestückbereichs durchge-
führt. 6
1 - 32
Student Guide SIPLACE HF/HF3
6 Collect&Place-Kopf / DLM2 Ausgabe 09/2005
32
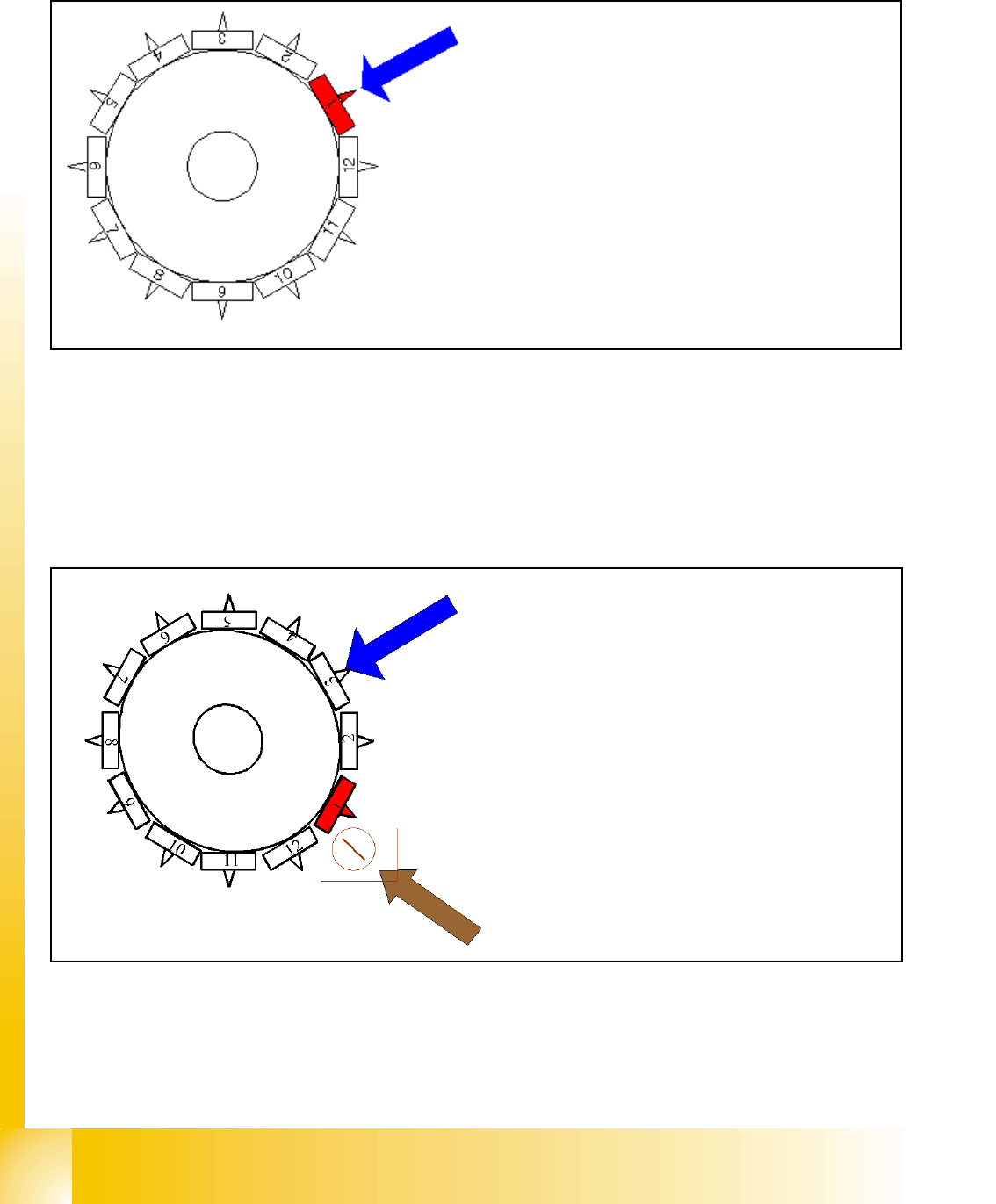
6.3.5 Vorbereiten von Pipette 1 zum Abholwinkel (0° oder 90°)
Abb. 6.3 - 5 Drehung von Pipette 1 zum Abholwinkel (0° oder 90°)
Die weiteren Pipetten am Kopf werden nach Weiterdrehen des Sterns auf ihren jeweiligen
Abholwinkel gedreht.
6.3.6 Pipettenlänge für BE-Erkennung überprüfen
Abb. 6.3 - 6 Überprüfen der Pipettenlänge "BE-Erkennung vor Bestücken durch den BE-Sensor"
– Die Sternachse dreht auf 240°.
Jetzt ist die Pipette 1 in der DP-Station.
– Die DP-Station schwenkt ein und das DP-Achsen-
Steuerungssystem dreht die Pipette auf ihren
Abholwinkel von 0 ° oder 90 ° (Standard-
Abholwinkel).
– Sobald die Pipette ihre Position erreicht hat, wird
die Endemeldung ausgelöst und die DP-Station
schwenkt zurück.
Messung durch BE-Sensor (Option) bei ca.
315°:
–Der
BE-Sensor misst die Länge der Pi-
pette. Diese gemessene Länge vor
Abholen wird mit der Referenzlänge der
Pipette verglichen.
– Wird ein Längenunterschied von -0,15mm
oder +0,1mm festgestellt, bewegen die
Portalachsen den Bestückkopf in die Ser-
vicepositon um die Pipette zu tauschen.
– Die Messung erfolgt "On the Fly"
1 - 33
Student Guide SIPLACE HF/HF3
Ausgabe 09/2005 6 Collect&Place-Kopf / DLM2
33
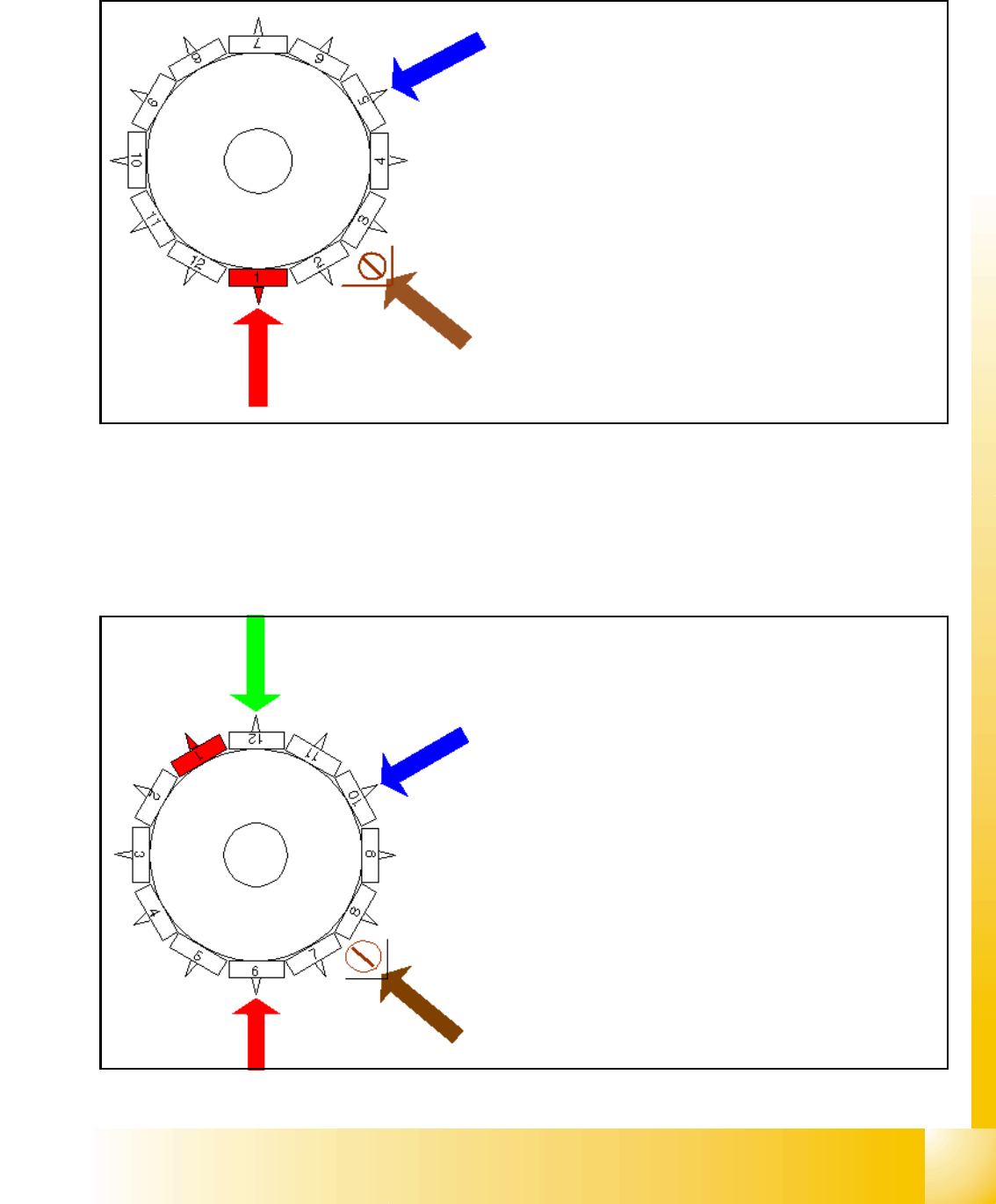
6.3.7 Abholen des ersten Bauelementes
Abb. 6.3 - 7 Abholen des ersten Bauelementes
Die verbleibenden Pipetten nehmen jetzt mit Weiterdrehen des Sterns die Bauelemente auf.
6.3.8 Abholen des 6. Bauelementes
Abb. 6.3 - 8 Abholen des 6. Bauelementes
Sternposition 0°
– Visionsystem: Keine Aktion
– DP-Station: Drehung der Pipette 5 auf ihren Abhol-
winkel
– Abhol-/Bestückstation: Abholen des ersten Bauele-
mentes
– BE-Sensor: Während des nächsten Sterntaktes wird
die Pipettenlänge auf Segment 3 gemessen.
Sternposition 150°
– Visionsystem: keine Aktion
– DP-Station: Drehung der Pipette 10 auf den Abhol-
winkel
– Abhol-/Bestückstation:
Abholen des 6. Bauelementes
– Synchronisation:
Kommunikation mit MVS für optische Zentrierung.
Freigabe des MVS für das abholende Portal.
– BE-Sensor: während des nächsten Sternschrittes
wird die Länge der 8. Pipette gemessen.