SG_FSE_SiplaceHF_HF3_00193900-05_de.pdf - 第446页
1 - 18 S tudent Guide SIPLACE HF/HF3 10 SITEST Ausgabe 09/2005 18 BE-Kamer a: 10 – Die Berechnung erfo lgt unter Ein beziehung de r Ax/Bx/Cx/A y/By/Cy Kalib rierwerte. Die Date n werden ges ichert unter : KAM_DA T .MA as…
1 - 17
Student Guide SIPLACE HF/HF3
Ausgabe 09/2005 10 SITEST
17
Maschinennullpunkt 10
– Der Mittelpunkt des LP-Kamera wird für das Portal als Referenzpunkt benutzt. Alle Positionen
der X-/Y-Achse beziehen sich auf diesen Kameramittelpunkt.
– Als Referenzpunkt für den Maschinennullpunkt dient eine Bohrung neben der Kalibrierteil-Ablage.
– Sobald sich die LP-Kamera über dem Mittelpunkt dieser Bohrung befindet, wird die Portalpo-
sition exakt auf diese Werte gesetzt:
MA nullpunkt_x_PG1 631300 / MA nullpunkt_y_PG1 1298000. (PG bedeutet gantry group)
MA nullpunkt_x_PG2 1368700 / MA nullpunkt_y_PG2 702000
LP-Kamera: 10
– Die Pixelgröße des CCD-Sensors wird bestimmt (in µm)
Die Berechnung erfolgt unter Einbeziehung der Ax/Bx/Ay/By Kalibrierwerte. Die Daten werden
gesichert unter:
KAM_DAT.MA as:XU_Pixel / YU_Pixel
– Die Pixelgröße ist:
ca. 11600 nm bei der Standard-LP-Kamera SST 5,
ca. 9900 nm bei LP-Kamera Multicolor SST 18.
– Der Kameramittelpunkt wird bestimmt.
– Dieser Kameramittelpunkt ist nun der Referenzpunkt für alle Offsets und Portalpositionen!!
– Der Verdrehwinkel des CCD-Sensors in der LP-Kamera gegenüber dem Maschinenkoordina-
tensystem. Der Wert wird als
Kamera_winkel im Datenblock der LP-Kamera in KAMDAT.MA
gesichert.
Kalibrierteilposition (optional): 10
– Kalibrierung der X- und Y-Abholposition des Kalibrierteils.
Verfahrweg (optional): 10
– Das Portal verfährt zum Nullimpuls zur Kalibrierung des Verfahrweges, anschliessend zum
HW-Endschalter. Dort wird der Positionstand des Portals aufgenommen.
– Der Software-Endschalter (Y +/- 1.5 mm , X +/- 0,5 mm) wird berechnet.
65mm
We nde punk t für Re fe re nzla uf
Geschwindigkeitsüberwachung
HW-Endsc ha lter
Y-Ac hse
45mm
X-Ac hse
Geschwindigkeitsüberwachung
HW-Endsc ha lter
HW- Endsc ha lter
Geschwindigkeitsüberwachung
We nde punk t für Re fe re nzla uf
Geschwindigkeitsüberwachung
HW- Endsc ha lter
1 - 18
Student Guide SIPLACE HF/HF3
10 SITEST Ausgabe 09/2005
18
BE-Kamera: 10
– Die Berechnung erfolgt unter Einbeziehung der Ax/Bx/Cx/Ay/By/Cy Kalibrierwerte. Die Daten
werden gesichert unter:
KAM_DAT.MA as:XU_Pixel / YU_Pixel
– Die Pixelgröße ist:
ca. 150000 nm bei BE-camera SST 12 (für 12er Kopf)
ca. 81000 nm bei BE-camera SST 13 (für 6er Kopf)
ca. 27500 nm bei DCA-Kamera SST14
– the camera center is determined.
– Der Verdrehwinkel des CCD-Sensors in der LP-Kamera gegenüber der Drehebene des Sterns
wird ermittelt. Der Wert wird als
Kamera_winkel im Datenblock der BE-Kamera in KAMDAT.MA
gesichert.
Ablauf für Segment-Offset unten (II):
Ablauf für ein Segment
– das Kalibrierteil wird mit der Pipette unter 0° abgeholt, optisch zentriert und bestückt. Mit der
LP-Kamera wird anschließend die exakte Position ermittelt (in µm).
– das Kalibrierteil wird mit der Pipette unter 90° abgeholt, optisch zentriert und bestückt. Mit der
LP-Kamera wird anschließend die exakte Position ermittelt (in µm).
– das Kalibrierteil wird mit der Pipette unter 180° abgeholt, optisch zentriert und bestückt. Mit der
LP-Kamera wird anschließend die exakte Position ermittelt (in µm).
– das Kalibrierteil wird mit der Pipette unter 270° abgeholt, optisch zentriert und bestückt. Mit der
LP-Kamera wird anschließend die exakte Position ermittelt (in µm).
Dieser Ablauf wird ein zweites Mal wiederholt. Aus den 8 Bestückposition wird der Mittelwert er-
mittelt.
Die Abweichung zur Soll-Bestückposition wird als Segment-Offset unten (II) eingetragen.
LP-Kamera -> BE-Kamera-Offset:
– Bei der Messung des Segment-Offsets unten (II) wird der LP-Kamera -> BE-Kamera-Offset mit
Segment 1 wie folgt berechnet:
– Der Abstand der Kameramitten in X- und Y-Richtung wird in µm berechnet.
– Der Mittelpunkt der LP-Kamera ist der Referenzpunkt.
– Dieser Abstand wird gespeichert in der REAL.MA unter ‘Kopfoffsets’ bei Kopf 1 (oder in Zukunft
Kopf 2) Kopfoffset_X /..Y. (The Segmentoffset bottom of Segment 1 is 0)
– Die Segment-Offsets der übrigen 11 (bzw. 5) Segmente werden in der Datei PIP_OFF.MA ge-
sichert (als Abweichung zu Segment 1).
– Für den Segment-Offset unten existieren keine Grenzwerte.
1 - 19
Student Guide SIPLACE HF/HF3
Ausgabe 09/2005 10 SITEST
19
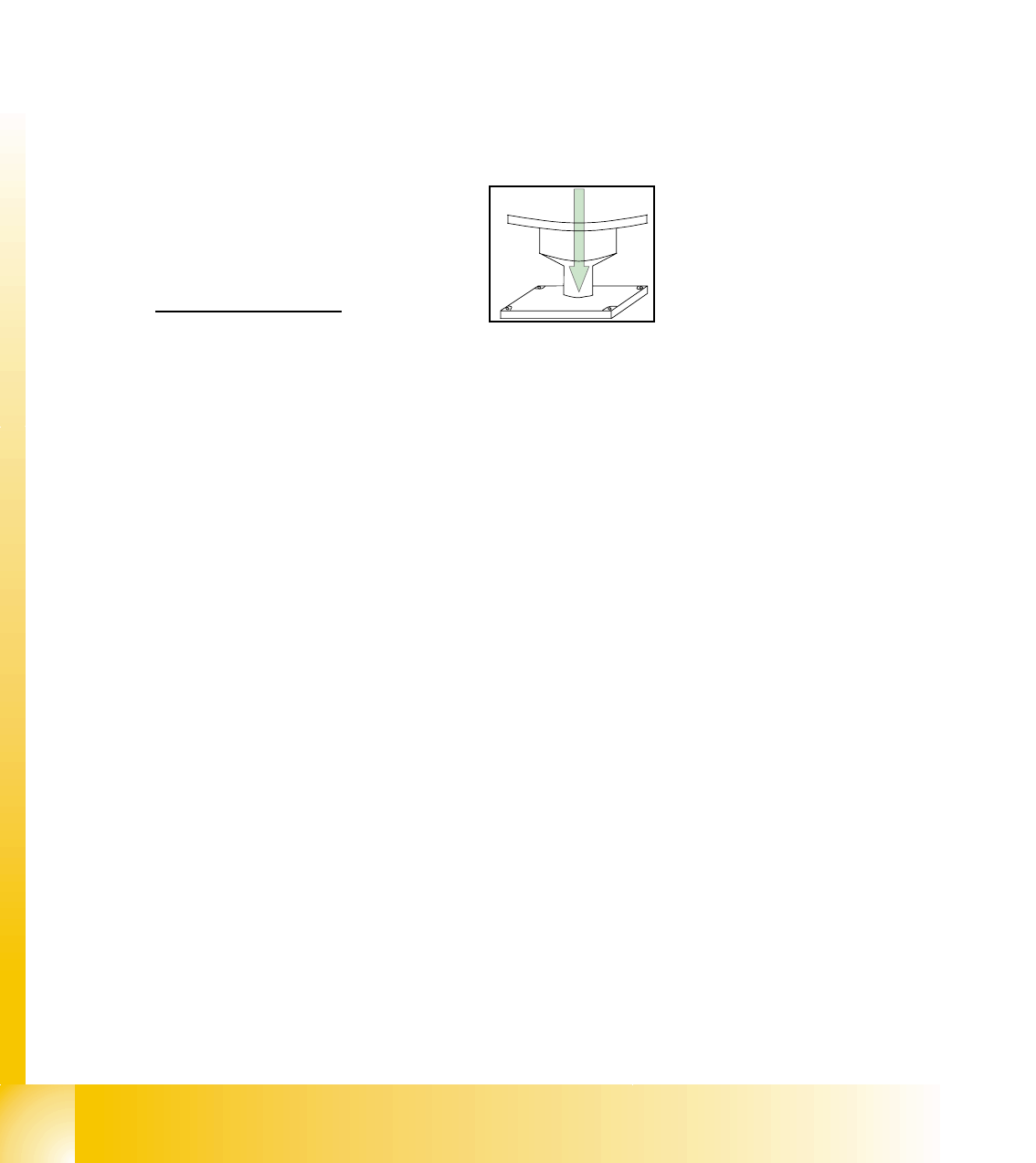
Ablauf für Segment-Offset oben (I):
Fig. 10.2 - 6 Prinzipzeichnung des Kalibrierteils unter der Kamera in 0° (links); in 180°(rechts).
– Nach Abschluss der Kalibrierschrittes Segment-Offset unten (II) startet der Kalibrierschritt Ab-
lauf für Segment-Offset oben (I)
C&P Kopf DLM 2:
– die Abweichung in X- und Y-Richtung der Drehachse der Segmente gegenüber dem BE-Ka-
meramittelpunkt (in µm).
– Die Messung wird zweimal unter 0° and 180° bzw. 90° und 270° durchgeführt (acht Messun-
gen pro Segment).
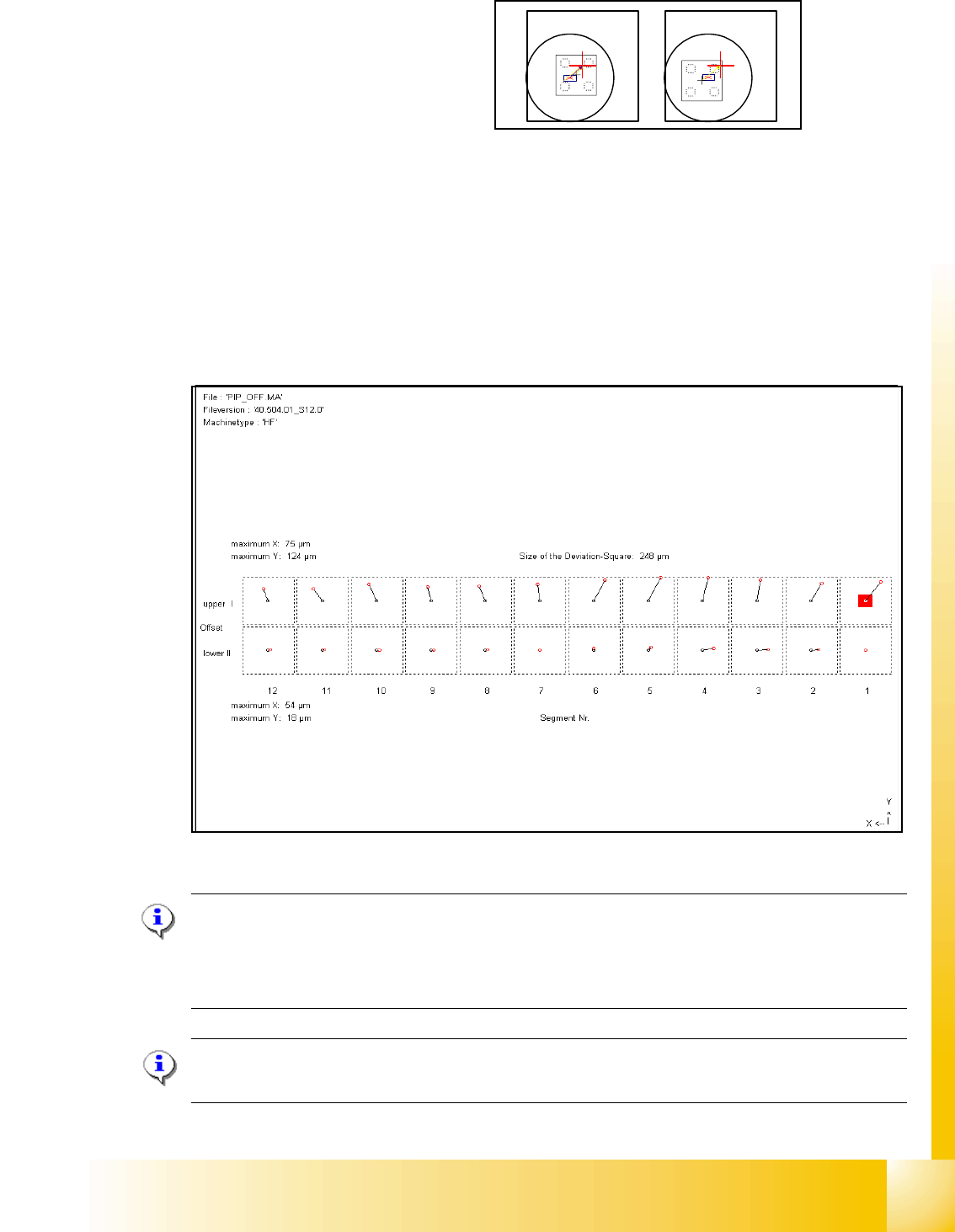
– Die Werte für den Segment-Offset wird in der Datei PIP_OFF.MA gespeichert.
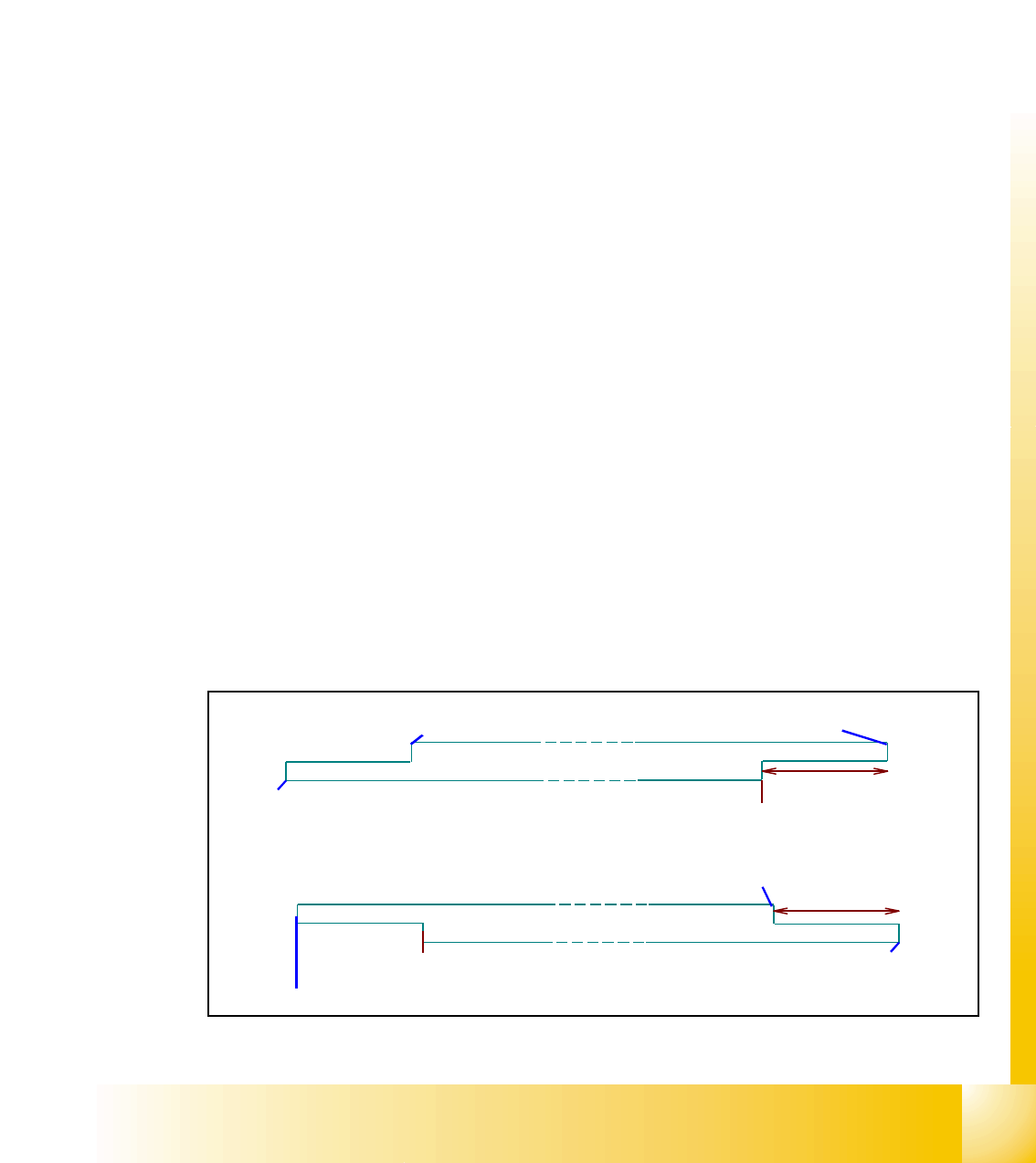
Die folgende Grafik veranschaulicht den Segment-Offset I und II:
Abb. 10.2 - 7 Grafische Darstellung für Segment-Offset I und II
Hinweis:
Für Segment-Offset I (oben) darf der Wert für die Standardabweichung +/- 600µm (450µm) nicht
überschreiten. Die Differenz zwischen den Segmenten darf +/- 150 µm nicht überschreiten.
Segment-Offset II (unten) absoluter Grenzwert +/-150µm und Differenz der Werte max. +/-150µm.
Hinweis:
Segment-Offset I ist für Segment I immer 0. Segment I ist die Referenz für die übrigen Segmente.