SG_FSE_SiplaceHF_HF3_00193900-05_de.pdf - 第447页
1 - 19 S tudent Guide SIPLACE HF/HF3 Ausgabe 09/2005 10 SITES T 19 Ablauf für Segment-Offset oben (I): Fig. 10.2 - 6 Prinzipzeichnung des Kalibrierteils unter der Kamer a in 0° (links); in 180°(rechts). – Nach Abschluss …
1 - 18
Student Guide SIPLACE HF/HF3
10 SITEST Ausgabe 09/2005
18
BE-Kamera: 10
– Die Berechnung erfolgt unter Einbeziehung der Ax/Bx/Cx/Ay/By/Cy Kalibrierwerte. Die Daten
werden gesichert unter:
KAM_DAT.MA as:XU_Pixel / YU_Pixel
– Die Pixelgröße ist:
ca. 150000 nm bei BE-camera SST 12 (für 12er Kopf)
ca. 81000 nm bei BE-camera SST 13 (für 6er Kopf)
ca. 27500 nm bei DCA-Kamera SST14
– the camera center is determined.
– Der Verdrehwinkel des CCD-Sensors in der LP-Kamera gegenüber der Drehebene des Sterns
wird ermittelt. Der Wert wird als
Kamera_winkel im Datenblock der BE-Kamera in KAMDAT.MA
gesichert.
Ablauf für Segment-Offset unten (II):
Ablauf für ein Segment
– das Kalibrierteil wird mit der Pipette unter 0° abgeholt, optisch zentriert und bestückt. Mit der
LP-Kamera wird anschließend die exakte Position ermittelt (in µm).
– das Kalibrierteil wird mit der Pipette unter 90° abgeholt, optisch zentriert und bestückt. Mit der
LP-Kamera wird anschließend die exakte Position ermittelt (in µm).
– das Kalibrierteil wird mit der Pipette unter 180° abgeholt, optisch zentriert und bestückt. Mit der
LP-Kamera wird anschließend die exakte Position ermittelt (in µm).
– das Kalibrierteil wird mit der Pipette unter 270° abgeholt, optisch zentriert und bestückt. Mit der
LP-Kamera wird anschließend die exakte Position ermittelt (in µm).
Dieser Ablauf wird ein zweites Mal wiederholt. Aus den 8 Bestückposition wird der Mittelwert er-
mittelt.
Die Abweichung zur Soll-Bestückposition wird als Segment-Offset unten (II) eingetragen.
LP-Kamera -> BE-Kamera-Offset:
– Bei der Messung des Segment-Offsets unten (II) wird der LP-Kamera -> BE-Kamera-Offset mit
Segment 1 wie folgt berechnet:
– Der Abstand der Kameramitten in X- und Y-Richtung wird in µm berechnet.
– Der Mittelpunkt der LP-Kamera ist der Referenzpunkt.
– Dieser Abstand wird gespeichert in der REAL.MA unter ‘Kopfoffsets’ bei Kopf 1 (oder in Zukunft
Kopf 2) Kopfoffset_X /..Y. (The Segmentoffset bottom of Segment 1 is 0)
– Die Segment-Offsets der übrigen 11 (bzw. 5) Segmente werden in der Datei PIP_OFF.MA ge-
sichert (als Abweichung zu Segment 1).
– Für den Segment-Offset unten existieren keine Grenzwerte.
1 - 19
Student Guide SIPLACE HF/HF3
Ausgabe 09/2005 10 SITEST
19
Ablauf für Segment-Offset oben (I):
Fig. 10.2 - 6 Prinzipzeichnung des Kalibrierteils unter der Kamera in 0° (links); in 180°(rechts).
– Nach Abschluss der Kalibrierschrittes Segment-Offset unten (II) startet der Kalibrierschritt Ab-
lauf für Segment-Offset oben (I)
C&P Kopf DLM 2:
– die Abweichung in X- und Y-Richtung der Drehachse der Segmente gegenüber dem BE-Ka-
meramittelpunkt (in µm).
– Die Messung wird zweimal unter 0° and 180° bzw. 90° und 270° durchgeführt (acht Messun-
gen pro Segment).
– Die Werte für den Segment-Offset wird in der Datei PIP_OFF.MA gespeichert.
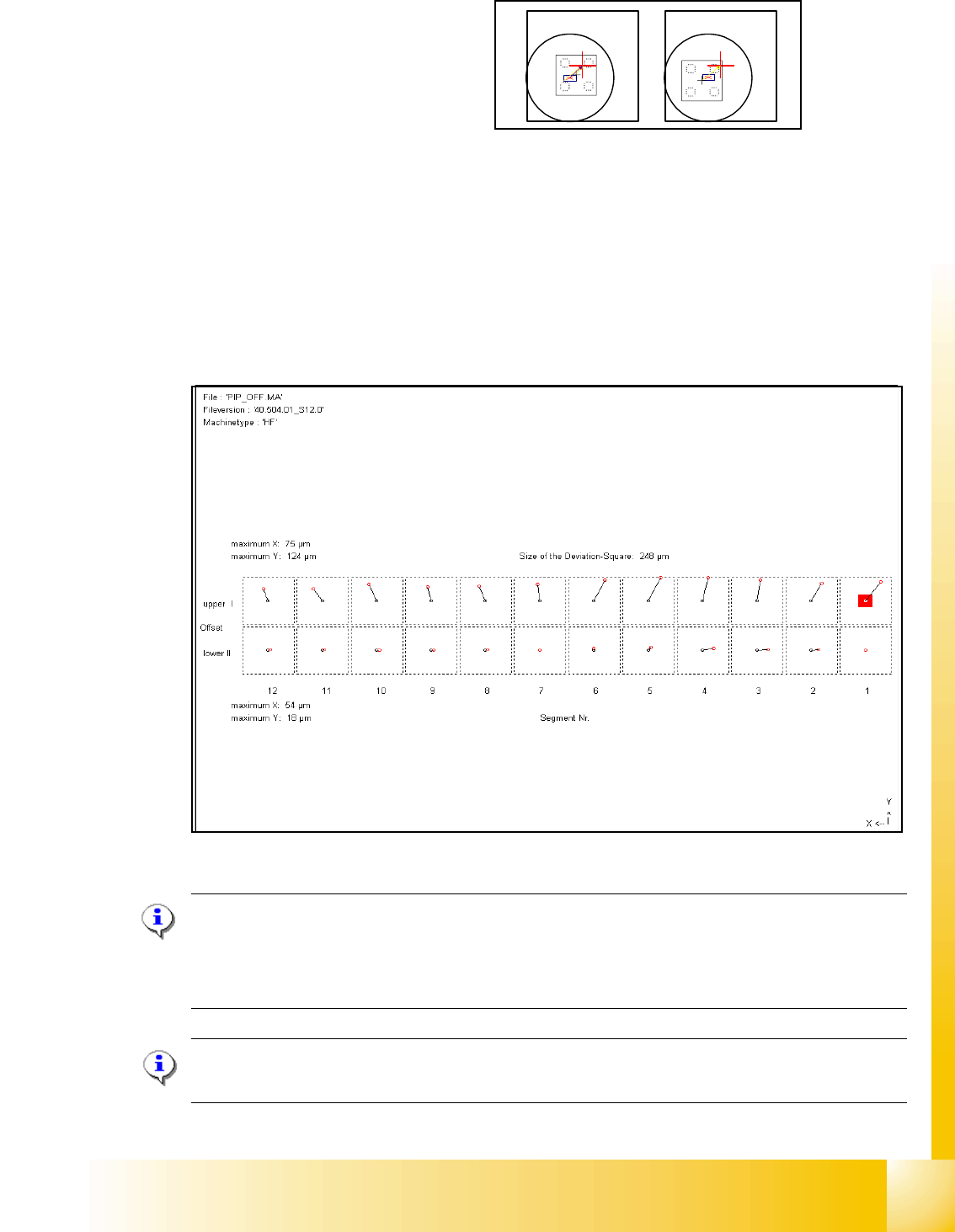
Die folgende Grafik veranschaulicht den Segment-Offset I und II:
Abb. 10.2 - 7 Grafische Darstellung für Segment-Offset I und II
Hinweis:
Für Segment-Offset I (oben) darf der Wert für die Standardabweichung +/- 600µm (450µm) nicht
überschreiten. Die Differenz zwischen den Segmenten darf +/- 150 µm nicht überschreiten.
Segment-Offset II (unten) absoluter Grenzwert +/-150µm und Differenz der Werte max. +/-150µm.
Hinweis:
Segment-Offset I ist für Segment I immer 0. Segment I ist die Referenz für die übrigen Segmente.
1 - 20
Student Guide SIPLACE HF/HF3
10 SITEST Ausgabe 09/2005
20
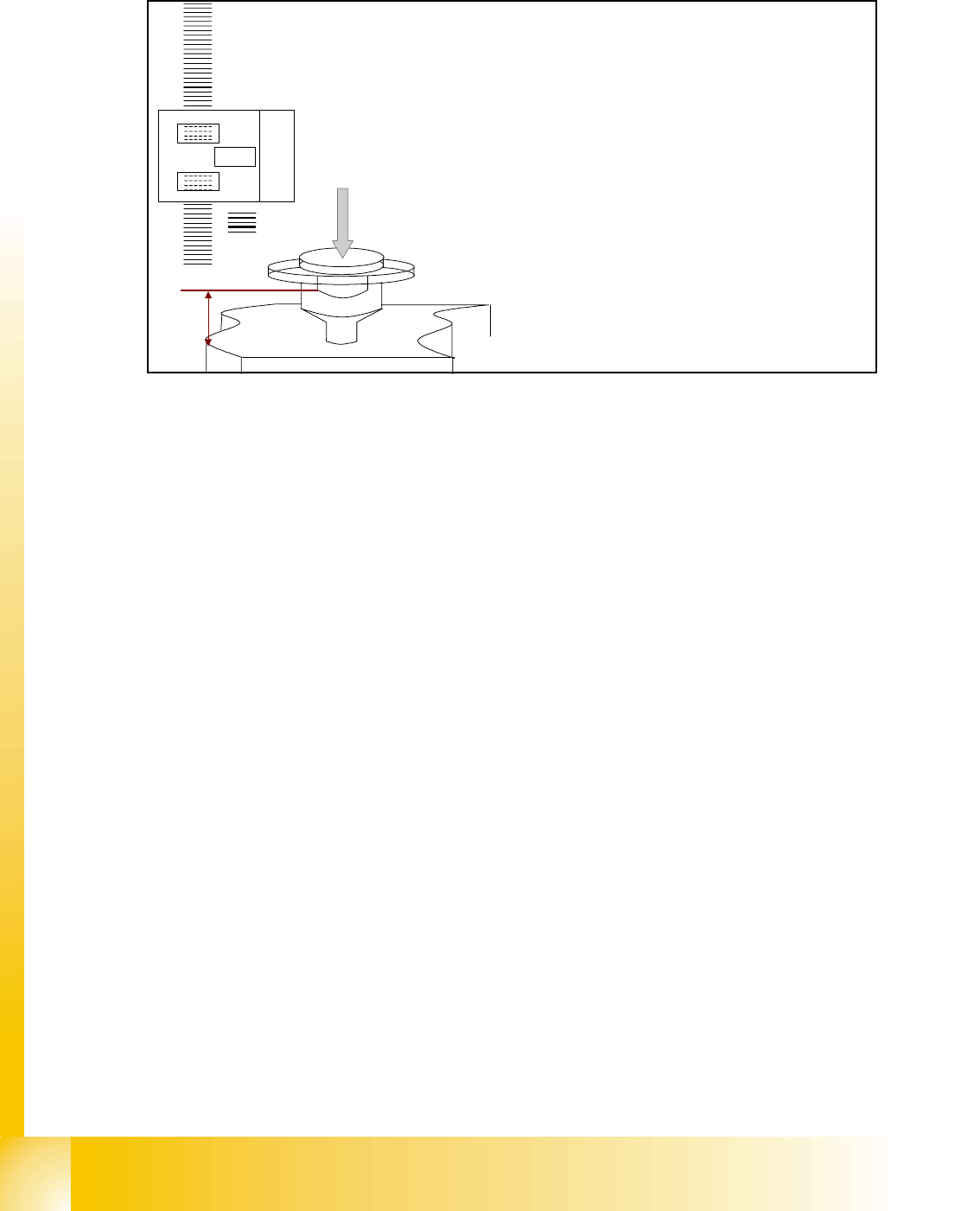
Twin Head Kopfhöhe: Kopfhöhe kalibrieren bedeutet, die Nullpunktkorrektur der Z-Achse aufzunehmen.10
Fig. 10.2 - 8 Twin Head Kopfhöhe
Ablauf:
– der Nullimpuls wird angefahren -> der Positionszähler zu 0 gesetzt.
– mit der 517er Pipette setzt der Twin Head auf die Transportwange auf.
– substrahiere Kopfhöhe aus der Ideal.ma (65500)
– substrahiere theoretische Pipettenlänge (Länge ohne Pipettenadapter).
– Zpos.akt. - Pip.länge - Kopfhöhe = Nullpunktkorrektur
IC-Kamera: 10
– Nach dem Messen der Kopfhöhe (Nullpunktkorrektur Z-Achse) wird die IC-Kamera kalibriert.
– Die erste Messung ist die Fokusebene der festeingebauten Kamera. Der Twin Head ermittelt
mit Segment 1 die für die optische Darstellung optimal scharf abbildende Z-Höhe. (Diese Höhe
wird später mit der BE-Unterseite angefahren.)
– Die Pixelgröße (in µm) der Kamera wird berechnet. Abgespeichert wird als:
XU_Pixel / YU_Pixel der Kamera 11(in 79000 nm).
– Die Kameramitte der IC-Kamera bezieht sich auf den Zählernullpunkt des Portalachsen
Positioniersystems.
Eingetragen sind diese Koordinaten beim Datenblock Kamera 11:
(Portal 2) Kamera_Position_X / 1483500
Kamera_Position_Y/ 1370500
Kamera_Offset_Z/ 5000
Die Kalibrierdaten der IC-Kamera werden gespeichert in mapp_pkt.ma file.
– Kalibrieren der IC Kamera Positionsmarke.
A
B
‘
1
5
4
3
2
1. Inkrementalgeber Z-Achse
2. Inkrementalgeber (fest)
3. Obere Kante der Transportwange
4. Kopfhöhe
5. Pipettenlänge