SG_FSE_SiplaceHF_HF3_00193900-05_de.pdf - 第449页
1 - 21 S tudent Guide SIPLACE HF/HF3 Ausgabe 09/2005 10 SITES T 21 FC-Kamera: (Option) 10 – Nach dem Messen der Kop fhöhe wird die FC Kamera kalibr iert. – Die erste Messung ist die Fokusebene der festeingebauten Kame ra…
1 - 20
Student Guide SIPLACE HF/HF3
10 SITEST Ausgabe 09/2005
20
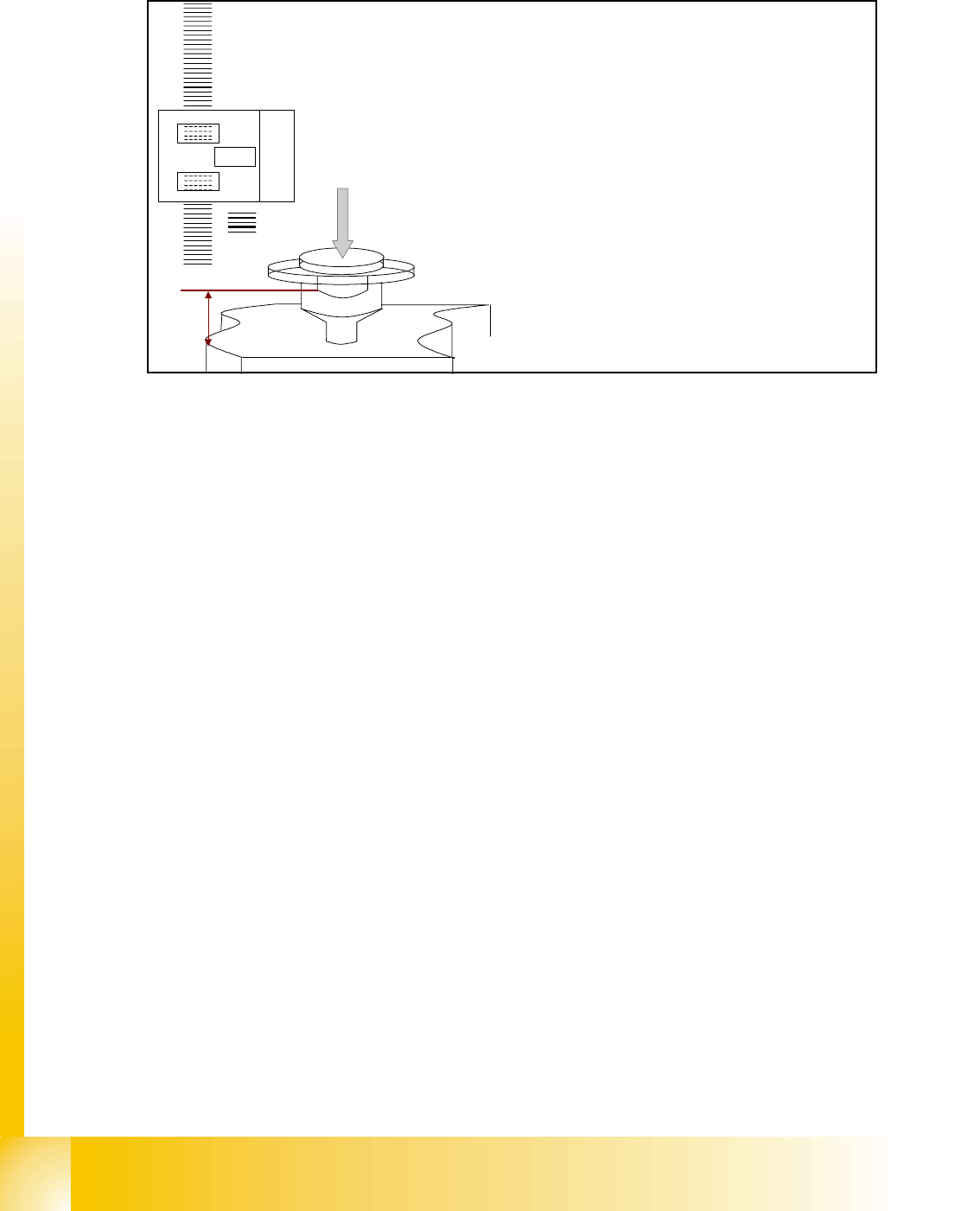
Twin Head Kopfhöhe: Kopfhöhe kalibrieren bedeutet, die Nullpunktkorrektur der Z-Achse aufzunehmen.10
Fig. 10.2 - 8 Twin Head Kopfhöhe
Ablauf:
– der Nullimpuls wird angefahren -> der Positionszähler zu 0 gesetzt.
– mit der 517er Pipette setzt der Twin Head auf die Transportwange auf.
– substrahiere Kopfhöhe aus der Ideal.ma (65500)
– substrahiere theoretische Pipettenlänge (Länge ohne Pipettenadapter).
– Zpos.akt. - Pip.länge - Kopfhöhe = Nullpunktkorrektur
IC-Kamera: 10
– Nach dem Messen der Kopfhöhe (Nullpunktkorrektur Z-Achse) wird die IC-Kamera kalibriert.
– Die erste Messung ist die Fokusebene der festeingebauten Kamera. Der Twin Head ermittelt
mit Segment 1 die für die optische Darstellung optimal scharf abbildende Z-Höhe. (Diese Höhe
wird später mit der BE-Unterseite angefahren.)
– Die Pixelgröße (in µm) der Kamera wird berechnet. Abgespeichert wird als:
XU_Pixel / YU_Pixel der Kamera 11(in 79000 nm).
– Die Kameramitte der IC-Kamera bezieht sich auf den Zählernullpunkt des Portalachsen
Positioniersystems.
Eingetragen sind diese Koordinaten beim Datenblock Kamera 11:
(Portal 2) Kamera_Position_X / 1483500
Kamera_Position_Y/ 1370500
Kamera_Offset_Z/ 5000
Die Kalibrierdaten der IC-Kamera werden gespeichert in mapp_pkt.ma file.
– Kalibrieren der IC Kamera Positionsmarke.
A
B
‘
1
5
4
3
2
1. Inkrementalgeber Z-Achse
2. Inkrementalgeber (fest)
3. Obere Kante der Transportwange
4. Kopfhöhe
5. Pipettenlänge

1 - 21
Student Guide SIPLACE HF/HF3
Ausgabe 09/2005 10 SITEST
21
FC-Kamera: (Option) 10
– Nach dem Messen der Kopfhöhe wird die FC Kamera kalibriert.
– Die erste Messung ist die Fokusebene der festeingebauten Kamera. Der Twin Head ermittelt
mit Segment 1 die für die optische Darstellung optimal scharf abbildende Z-Höhe. (Diese Höhe
wird später mit der BE-Unterseite angefahren.)
– Die Pixelgröße in µm der Kamera wird festgelegt. Abgespeichert wird als:XU_Pixel / YU_Pixel
der Kamera 15(in 19600 nm).
– Die Kameramitte der FC-Kamera bezieht sich auf den Zählernullpunkt des Portalachsen Posi-
tioniersystems.
– Eingetragen sind diese Koordinaten beim Datenblock Kamera 15: (Portal 2)
Kamera_Position_X / Kamera_Position_Y/ Kamera_Offset_Z/
– Kalibrieren der IC Kamera Positionsmarke.
Twin Head Segment-Offset unten für Segment 1 und 2: 10
– Die D-Achse bzw. die Pinolenmitte des Twin Heads bezieht sich auf den Kameramittelpunkt
der LP-Kamera.
Eingetragen sind diese Koordinaten in PIP_OFF.MA im Datenblock
/Pipetten-Offsets unten Kopf 2/
Pipetten-Offsets unten Segment 1(2) Offset_X /Offset_Y /
Pipettenwechsler (C&P Kopf, Twin Head): 10
Hinweis: Vor dem Starten der Kalibrierung des Pipettenwechslers muss die Nullpunktkorrektur
der D-Achse (Twin Head) überprüft bzw. kalibriert werden. Weiterhin sollte die Konfiguration des
Pipettenwechslers und der Füllstand überprüft werden.
– Jedes Pipettenmagazin besitzt eine Passmarke (Bohrung), die zu Beginn des Kalibrierablaufs
angefahren und erkannt werden.
– Danach werden die beiden Passmarken (Bohrungen) der Halterung rechts und links angefah-
ren rechts angefahren und erkannt.
– optional kann nun die Abholhöhe des Pipettenwechslers kalibriert werden.
– optional kann nun die Abwurfposition des Pipettenwechslers kalibriert werden. Diese Position
wird im Betrieb beim Abwerfen defekter Pipetten angefahren.
Vakuum geschlossen kalibrieren: 10
Bei dieser Funktion wird auf der festen Transportwange mit der 518 Pipette der Wert bei geschlo-
ssenem Vakuumsystem für Segment 1 und 2 ermittelt.
1 - 22
Student Guide SIPLACE HF/HF3
10 SITEST Ausgabe 09/2005
22
10.2.4 Kalibrieren und Teachen von Positionen
Das Teach-Menü ist eine neue Funktion zur Kalibrierung der Positionen. Auf diese Weise kann
die korrekte Position vor dem Kalibrieren geteacht werden.
10.2.4.1 Transportwangen
Für das neue modulare Transportsystem ist diese Kalibrierfunktion notwendig.
Beim modularen Transport sind alle Transportwangen einstellbar. Zur Einstellung der Transport-
wangen wird ein Schrittmotor eingesetzt, der über einen Zahnriemen die Stelleinheit antreibt. Die
Position der Tranportwangen wird über einen BERO erkannt, daher gibt es nun für jeden Trans-
portwange einen Schaltpunkt. Mit der Kalibrierung werden die Schaltpunkte für den gesamten
Verfahrbereich der Breitenverstellung optimiert. Die Kalibrierung ist notwendig, um sicherzustel-
len, dass alle drei Stellantriebe die Transportwangen parallel verschieben.
Automatischer Ablauf (Transport Mapping):
– Der Stellantrieb wird initialisiert und bewegt die Transportwange zur rechten (Endschalter)
– Der Stellantrieb erkennt die feste Transportwange(n) (zwei beim Doppeltransport) und verfährt
die einstellbare(n) Transportwange(n) in die Standardposition von 55mm.
– Der Stellantrieb verfährt die Transportwange(n) schrittweise (10mm Schritte) und bestimmt
den Offset der Schaltpunkten der drei Stellantriebe in den verschiedenen Transportwangenpo-
sitionen.
– Diese Kalibrierung erfolgt von links nach rechts und zurück.
– Die Ergebnisse werden als Korrekturwerte auf der TSP 301 gespeichert und beim Einstellen
und Messen der Transportbreite berücksichtigt.
Hinweis:
Die Kalibrierung muss für Spur 1 und Spur 2 durchgeführt werden.
10.2.4.2 Transportbreite kalibrieren
Der Offset der Transportbreite wird mit einer 100mm breiten Leiterplatte bestimmt.
10.2.4.3 LP-Referenz-Ecke (Bestücknest)
– Wählen Sie die Transportspur aus.
– Wählen Sie LP-Referenz-Ecke (Bestücknest) rechts oder links - nur bei Doppeltransport.
– Das Portal wird so verfahren, dass die LP-Kamera über der LP-Referenz-Ecke steht. Die Bild-
schirmanzeige wird zur Überprüfung auf die LP-Kamera umgeschaltet. Teachen Sie das Portal
auf die rechte opere Kante der Leiterplatte, so dass LP-Referenz-Ecke sich mittig im Kamera-
Gesichtsfeld befinden.