SG_FSE_SiplaceHF_HF3_00193900-05_de.pdf - 第49页
1 - 25 S tudent Guide SIPLACE HF/HF3 Advanced I Ausgabe 09/2005 2 Überblick 25 2.2.10 Konstruktion X-Achse 2 Abb. 2.2 - 15 Konstruktion X-Achse Die X-Achse besteht aus den folgenden Ha uptmodulen: Die Portale sind bei de…
1 - 24
Student Guide SIPLACE HF/HF3 Advanced I
2 Überblick Ausgabe 09/2005
24
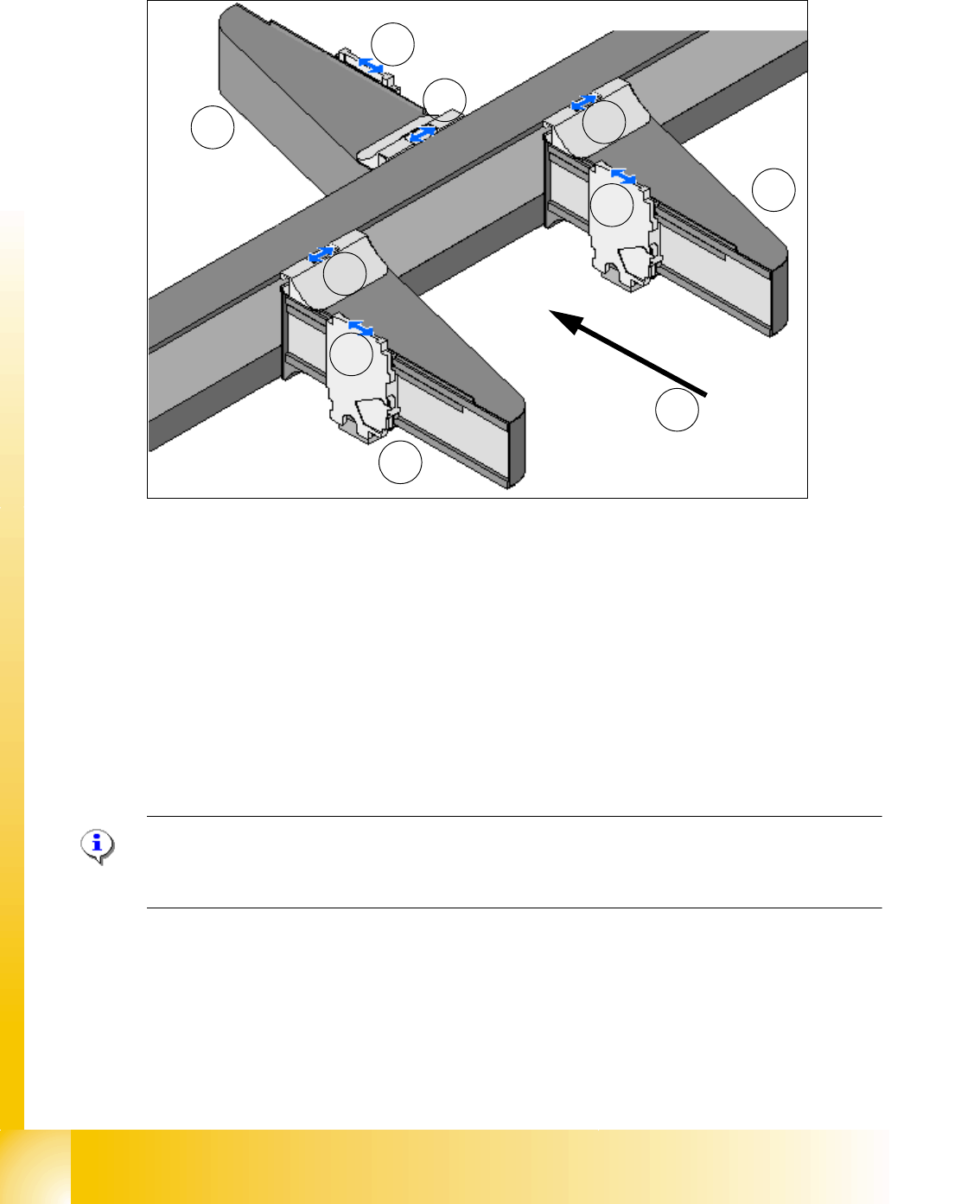
2.2.9 Position der Portale
Abb. 2.2 - 14 Position der Portale HF3
Legende
Hinweis
An der HF Maschine sind nur zwei Portale. Die Bezeichnung ist ab der Stationssoftware
505.xx. Portal 1 und Portal 3.
P1Portal 1 P3Portal 3
X1X-Achse, Portal 1 X3X-Achse, Portal 3
Y1Y-Achse, Portal 1 Y3 Y-Achse, Portal 3
P4Portal 4
X4X-Achse, Portal 4 (T)Transportrichtung
Y4Y-Achse, Portal 4
P4
P1
P3
Y4
Y3
Y1
X4
X3
X1
T
1 - 25
Student Guide SIPLACE HF/HF3 Advanced I
Ausgabe 09/2005 2 Überblick
25
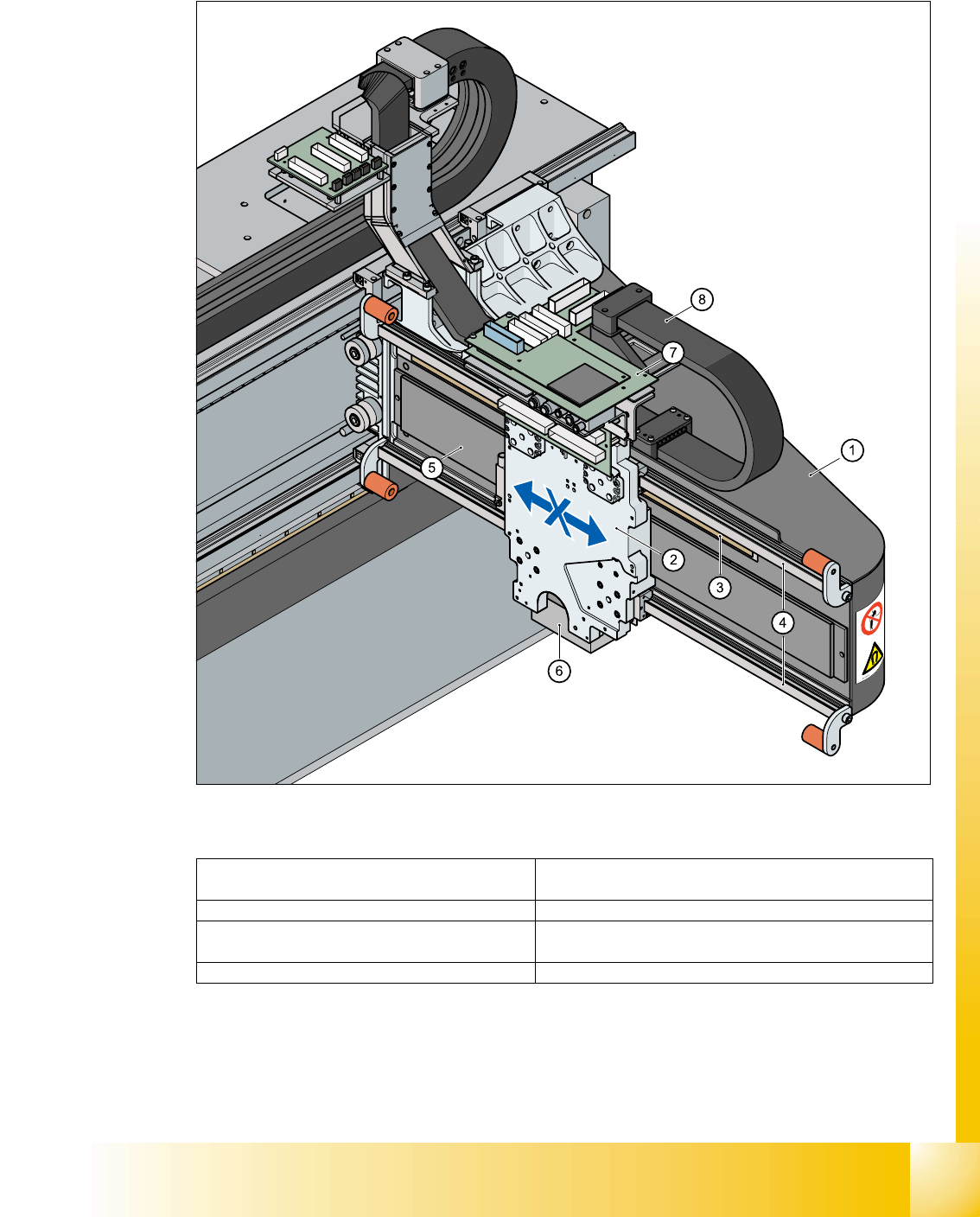
2.2.10 Konstruktion X-Achse
2
Abb. 2.2 - 15 Konstruktion X-Achse
Die X-Achse besteht aus den folgenden Hauptmodulen:
Die Portale sind bei der ursprünglichen -, und bei Ausführung ’A’ identisch.
Auf dem Kopfhalter (2) sind folgende Module montiert:
– LP-Kamera (6)
(1) Portal X (Rahmen) (2)Befestigungsplatte mit Kopf X-Linearmotor
(Primär)
(3) Linear-Inkrementalgeber (4) Linearführungen X-Achse
(5)Linearantrieb Dauermagnet
(Sekundär)
(6) Halter LP-Kamera
(7) Kopf-interface Platine (8)Kabelschlepp X-Achse
1 - 26
Student Guide SIPLACE HF/HF3 Advanced I
2 Überblick Ausgabe 09/2005
26
– Kopfplatinen (7) (Kopfschnittstelle. Kopfadapter)
– Inkrementalgeber
– Collect&Place-Kopf oder SIPLACE Twin Head
Der Portalarm (Pos. 1 in Abb. 2.2 - 15
) besteht aus Kohlefasermaterial. Dies verleiht dem Porta-
larm eine extreme Steifigkeit bei geringstem Gewicht. Die X Achse wird von einem Linearmotor
angetrieben. Der Sekundärteil des Antriebs besteht aus einem Dauermagnet und ist am Porta-
larm befestigt, der Primärteil ist an den Kopfhalter angeschraubt. Der Kopfhalter wurde so kon-
struiert, dass daran alle Kopfmodelle befestigt werden können - ein weiteres Merkmal der großen
Flexibilität, die SIPLACE-Automaten bieten.
2.2.10.1 Technische Daten X-Achse
2
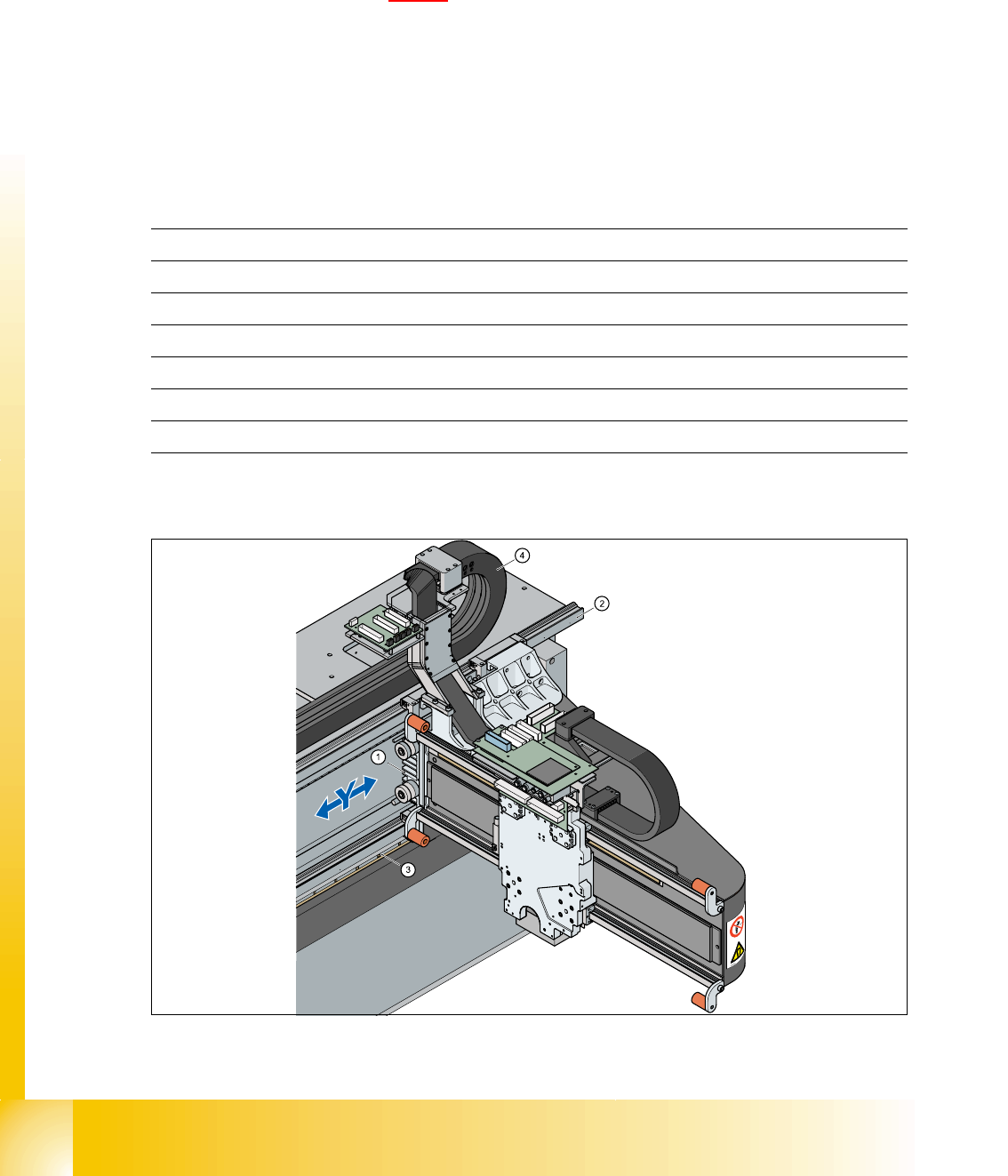
2.2.11 Konstruktion Y-Achse
2
Abb. 2.2 - 16 Konstruktion Y-Achse
Antrieb direkt, Linearantrieb
Max. Geschwindigkeit 2,5 m/Sek.
Verfahrbereich 471 mm
Verfahrbereich mechanisch 480 mm
Messsystem Linear-Inkrementalgeber
Länge des Linear-Inkrementalgebers 520 mm
Auflösung 1 µm