SG_FSE_SiplaceHF_HF3_00193900-05_de.pdf - 第494页
1 - 20 S tudent Guide SIPLACE HF/HF3 1 1 MTC2 Ausgabe 09/2005 20 1 1.2.1 Einbindung in die SIPLACE-St ation Abb. 1 1.2 - 1 Schnittstellen und Spannungsversorgung des MTC 2 (hier T urm 1) 1 1.2.1.1 CAN-Bus Über diese Sch …

1 - 19
Student Guide SIPLACE HF/HF3
Ausgabe 09/2005 11 MTC2
19
11.2 Aufbau und Wirkungsweise
Der MTC 2 erweitert die BE-Bereitstellungskapazität einer SIPLACE-Station um bis zu 100 JE-
DEC-Flächenmagazine. Er hat eine eigene Steuerung (C167-Controllerboard) und ist in die Sta-
tionsrechner-Software eingebunden. Die Rüstung des MTC 2 ist in die Liniensteuerungs-Software
einer Anlage integriert.
Die beiden Türme des MTC 2 bestehen jeweils aus einer Hub- und Zuführachse. Die Hubachsen
können mit einer großen Anzahl von Flächenmagazinen in Kassetten gerüstet werden und trans-
portieren diese in vertikaler Richtung. Die Zuführachsen transportieren gerüstete Flächenmaga-
zine in horizontaler Richtung in die Übergabeposition zur SIPLACE-Station.
Alle Antriebseinheiten bestehen aus Masterdrive-Antriebs-Systemen:
Die Servomotoren der Hubachsen treiben jeweils über einen doppelten Zahnriemen eine Spin-
del an, die die gerüsteten Kassetten in vertikaler Richtung transportiert. Eine Haltebremse in
den Motoren, die vom Masterdrive über Optokoppler angesteuert wird, verhindert ein Bewe-
gen der Achse bei ausgeschalteter Maschine. Die Hubachsen bleiben nach dem Erreichen ei-
ner Position in Regelung. Die Zahnriemen sind aus Sicherheitsgründen doppelt ausgeführt
und werden durch induktive Sensoren überwacht.
11
11
Die Servomotoren der Zuführachsen bewegen über einen Zahnriemen mit Riemenüberset-
zung einen Mitnehmer, der den ausgewählten FMT in horizontaler Richtung in die Übergabe-
position zur SIPLACE-Station fährt.
11
11
Hubachse
Eine Umdrehung des Servomotors entspricht 4096 Impulsen bzw. 10 mm Steigung auf der Spin-
del.
Zuführachse
Eine Umdrehung des Servomotors entspricht 4096 Impulsen bzw. 27,78 mm Strecke auf der Li-
nearführung.
1 - 20
Student Guide SIPLACE HF/HF3
11 MTC2 Ausgabe 09/2005
20
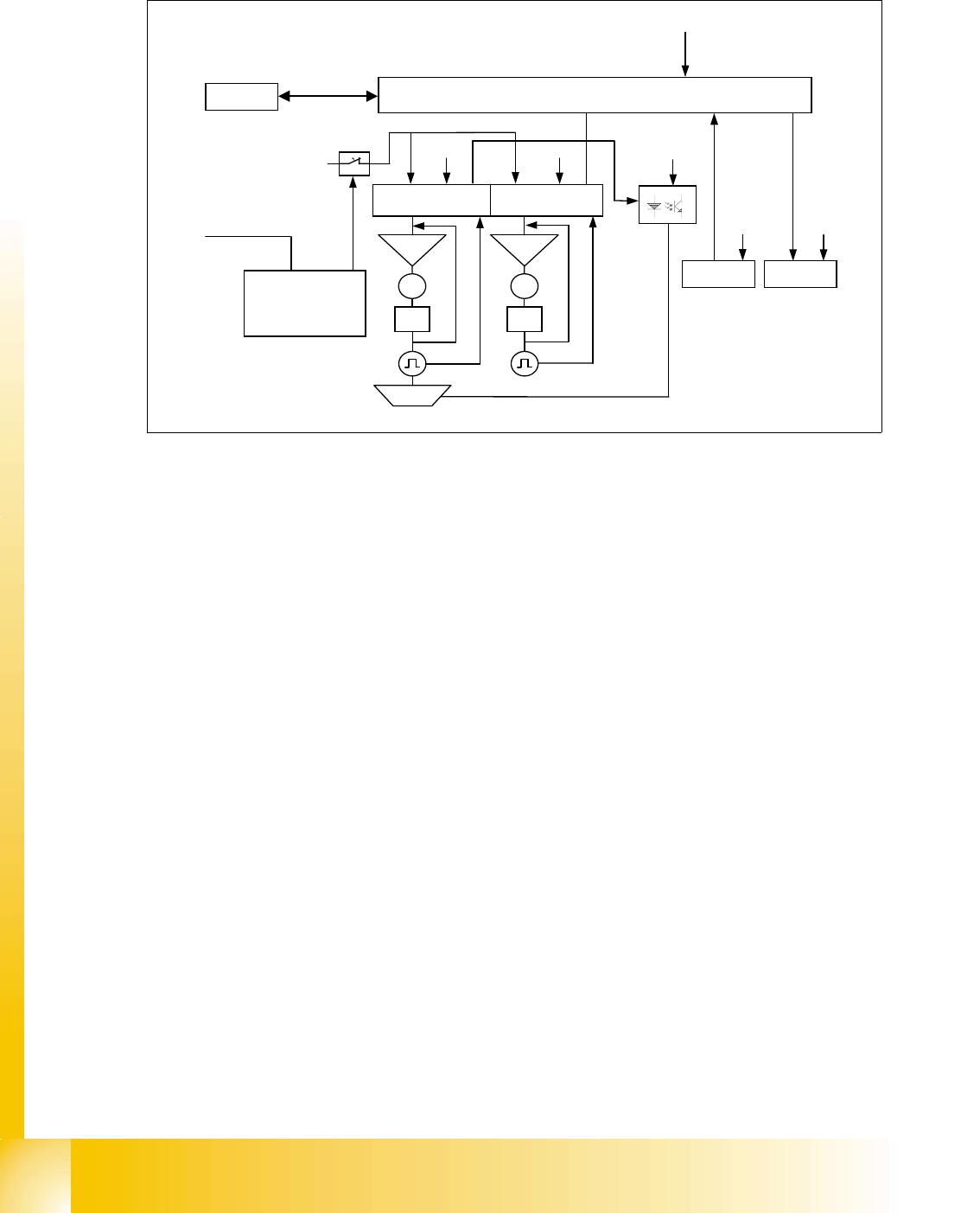
11.2.1 Einbindung in die SIPLACE-Station
Abb. 11.2 - 1 Schnittstellen und Spannungsversorgung des MTC 2 (hier Turm 1)
11.2.1.1 CAN-Bus
Über diese Schnittstelle laufen alle Kommandos, die vom Maschinencontroller der SIPLACE ge-
sendet werden (Beispiel: Referenzpositionsfahrt und Rüstdatenübernahme).
11.2.1.2 Spannungsversorgung 400 V
Der MTC 2 wird extern mit 400 V (USA/Japan: 208/204 V) eingespeist.
11.2.1.3 NOT-AUS-Schnittstelle
Der MTC 2 ist in den Sicherheitskreis der SIPLACE eingebunden, der eine Rückmeldung in Form
einer Schutzkreis-Spannung von 24 V gibt. Diese Schutzkreis-Spannung schaltet die entspre-
chende Sicherheitskombination und somit die 400 V der Umrichter für die Masterdrives.
Die Schütze schalten die Servo-Spannung (400 V) ab und ohne Verzögerung auch die Span-
nungsversorgung der Bremse.
Der Meldekontakt (Schließer) des NOT-HALT-Tasters ist mit dem Eingang des SIPLACE-Sicher-
heitsmeldesystems verbunden. Der Öffner unterbricht die 24 V Schutzkreisspannung der SI-
PLACE.
Wird der NOT-AUS-Kreis in einer Maschine unterbrochen (NOT-HALT-Pilzdrucktaster), fallen die
Masterdrives des MTC 2 ab. Beide Systeme sind dann spannungsfrei.
Beim Öffnen einer der beiden Schutztüren des MTC 2 fällt nur die Steuerspannung des entspre-
chenden Turmes ab.
Spannungsversorgung 24 V
C167-Controllerboard
Servo
M
PI
Servo
M
PI
Bremse
CAN-Bus
Sensoren
CAN-Bus
Sicherheits-
Schnittstelle
Spannungs-
versorgung 400 V
SIPLACE
Aktoren
24 V
24 V
24 V
24 V 24 V
Masterdrive
Hubachse 1
Masterdrive
Zuführachse 1
Sicherheits-
Kreis
1
2
3
4
1 - 21
Student Guide SIPLACE HF/HF3
Ausgabe 09/2005 11 MTC2
21
11.2.2 Referenzpositionsfahrt
Beim Einschalten des MTC 2 ist wie bei der SIPLACE-Station eine Referenzpositionsfahrt der
Servoachsen notwendig. Bleibt der MTC 2 eingeschaltet während die SIPLACE-Station aus- und
wieder eingeschaltet wird, meldet er, dass er bereits referenziert ist.
Bei der Referenzpositionsfahrt fahren beide Türme gleichzeitig in ihre Referenzpositionen, wobei
zuerst die beiden Zuführachsen und anschließend die beiden Hubachsen bewegt werden.
Jede Achsen fährt erst ihre physikalische Homelage an, überprüft dann die Lage der beiden Soft-
ware Endschalter und stoppt schließlich in der Software-Nullposition (entspricht dem jeweiligen
Null-Offset von der physikalischen Homelage). Diese dann eingenommenen Positionen sind als
Referenz- bzw. als Einmesspositionen definiert.
Im Detail läuft die Referenzfahrt für eine einzelne Achse folgendermaßen ab:
– Der aktuelle Null-Offset wird an den Masterdrive gesendet.
– Die Steuerung frägt die Lichtschranke "Ruheposition" ab und wartet auf eine steigende Flanke.
Steht die Achse bereits in der Lichtschranke, dann liefert diese ein "HIGH-Signal". Die Achse
fährt in positiver Richtung solange, bis die Lichtschranke eine fallende Flanke liefert. Anschlie-
ßend fährt die Achse wieder in negativer Richtung.
11
Steht die Achse nicht in der Lichtschranke, dann liefert diese ein "LOW-Signal". Die Achse fährt
in negativer Richtung.
11
– Die Achse fährt solange in negativer Richtung, bis die Lichtschranke die benötigte steigende
Flanke geliefert hat und die erste Rotor-Nullage (Index) gefunden worden ist.
Diese Vorgehensweise ist notwendig, da die Nullimpulse der Resolver-Winkelschrittgeber sich
bei jeder Umdrehung wiederholen und deshalb mehrmals innerhalb des möglichen Verfahrbe-
reiches erscheinen.
– Beide Software Endschalter der maximalen und minimalen Position werden bis auf wenige Mil-
limeter angefahren, um die gespeicherten Daten zu überprüfen.
– Zuletzt wird der aktuelle Null-Offset angefahren.
Hinweis:
Wenn das Anfahren der Software Endschalter nicht vollständig durchgeführt wird und am Bild-
schirm eine Fehlermeldung der Motorsteuerungen (Masterdrive) erscheint, muss eine der Achsen
neu eingemessen werden:
Sind alle vier Referenzpositionen angefahren, sucht die SIPLACE-Station auf den Zuführachsen
die beiden Referenzmarken. Die gefundene Position wird später zur Bestimmung der Abholposi-
tion von Bauelementen verwendet. Die Marken müssen in der MVS-Datei des Linienrechners vor-
handen sein.