SG_FSE_SiplaceHF_HF3_00193900-05_de.pdf - 第77页
1 - 9 S tudent Guide SIPLACE HF/HF3 Ausgabe 09/2005 3 Kommunikation und S teuerung 9 3.3 CAN-Bus 3.3.1 Geschichte des CAN-Bus Die Entwicklung von Controller Area Netwo rk begann als moderne Fahrzeuge me hr und mehr elekt…
1 - 8
Student Guide SIPLACE HF/HF3
3 Kommunikation und Steuerung Ausgabe 09/2005
8
3.2.3 Kommunikation Maschinensteuerung
Für die Berechnung der ’Abhol-Koordinaten’ fügt die Maschinensteuerung den Abhol-Koordina-
ten die Abhol-Korrekturwerte (früher Abhol-Offsets) hinzu.
Zur Berechnung der
’Bestück-Koordinaten’ fügt die Maschinensteuerung den Bestückkoordina-
ten die Korrekturwerte der LP-Position und die BE-Korrekturwerte hinzu.
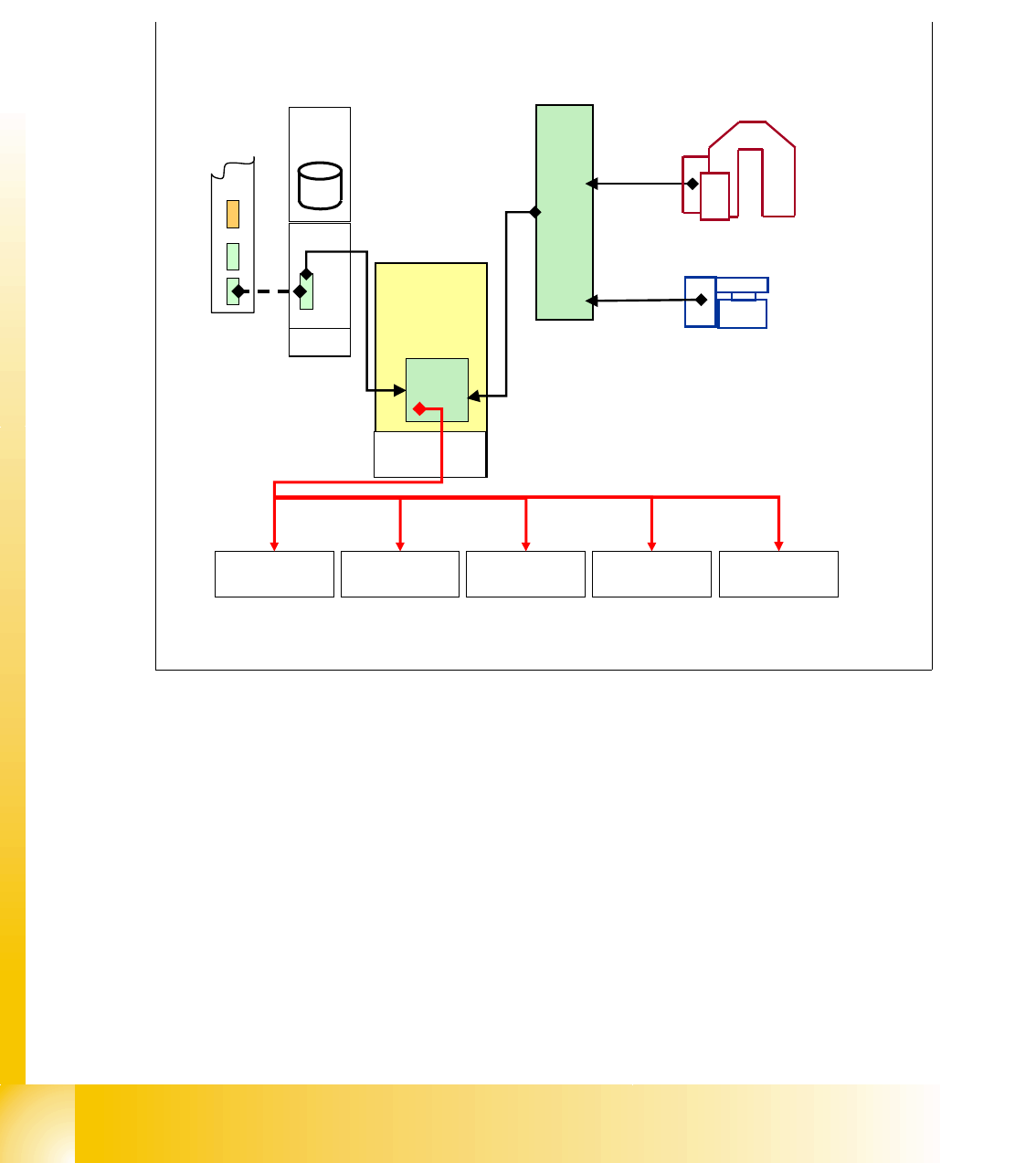
Abb. 3.2 - 4 Kommunikation bei der Maschinensteuerung
X-Achs-
steuerung
SR
MVS
340
Maschinen-
steuerung
Y-Achs-
steuerung
Stern-Achs-
steuerung
Z-Achs-
steuerung
DP-Achs-
steuerung
Bestückdaten
am MC
+
Zielposition für Abholen/Bestücken zur
Achssteuerung am MC?
1 - 9
Student Guide SIPLACE HF/HF3
Ausgabe 09/2005 3 Kommunikation und Steuerung
9
3.3 CAN-Bus
3.3.1 Geschichte des CAN-Bus
Die Entwicklung von Controller Area Network begann als moderne Fahrzeuge mehr und mehr
elektronisch gesteuert, überwacht und mit ’elektronischem Komfort’ ausgestattet wurden. Bei-
spiele sind Motormanagement, aktive Regelung wie z. Bsp. ABS, Schaltkontrolle, Beleuchtungs-
steuerung, Lüftung, Klimaanlage und Zentralverriegelung. Ebenso eine Reduzierung von
Verbrauch und erhöhte Umweltverträglichkeit.
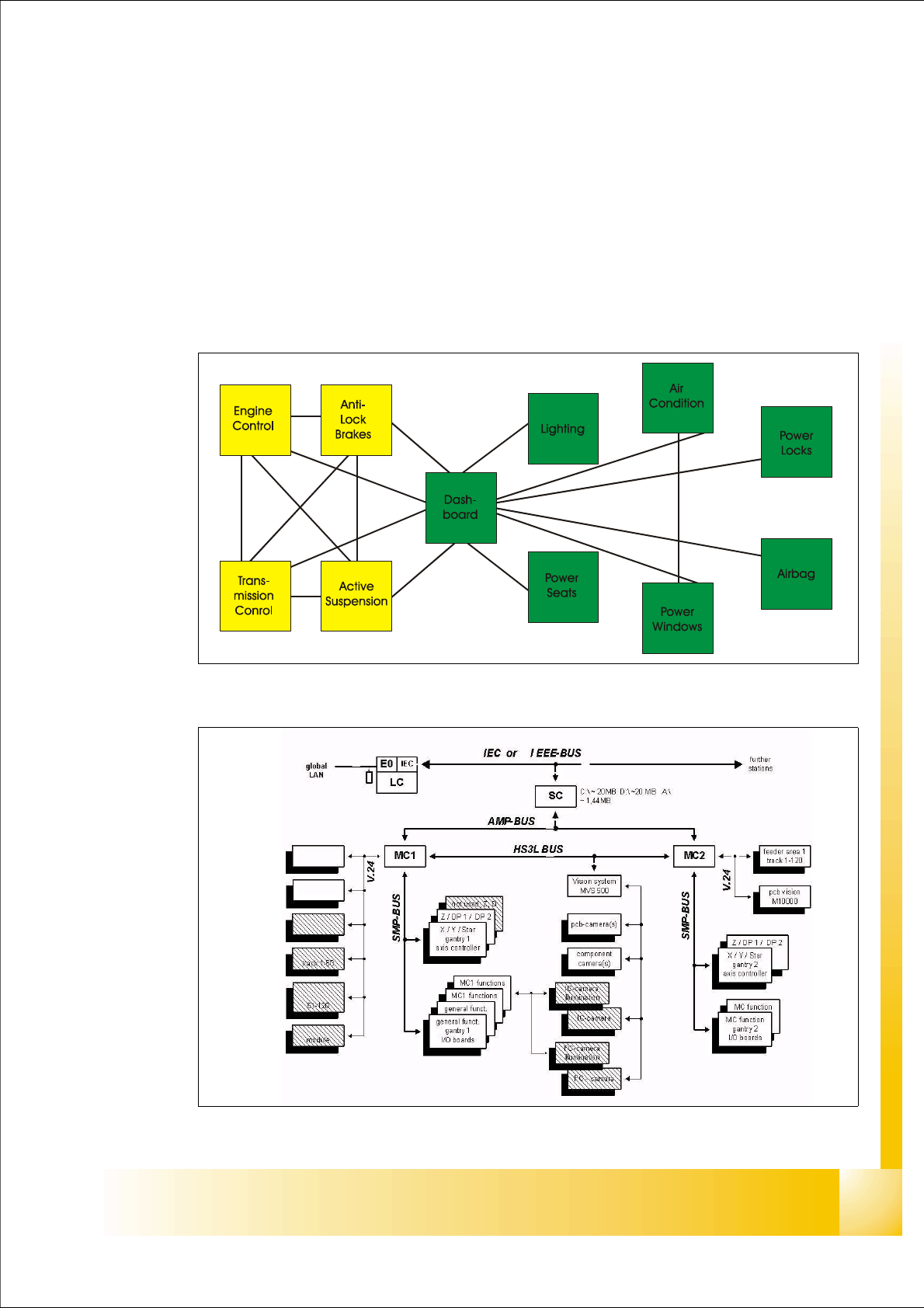
Abb. 3.3 - 1 Kommunikation über Kabelverbindungen
Abb. 3.3 - 2 Kommunikation z.B. in der Siplace S15 Maschine
1 - 10
Student Guide SIPLACE HF/HF3
3 Kommunikation und Steuerung Ausgabe 09/2005
10
Um das Fahrzeugverhalten weiterzuentwickeln war es nötig, dass die verschiedenen Steuerungs-
systeme und deren Sensoren Informationen austauschen. Dies wurde ursprünglich mit einer
Punkt zu Punkt Verdrahtung der Einzelkomponenten ausgeführt. Diese Notwendigkeit erhöhte
Kabelbaumlängen auf Kilometer und ebenfalls die Steckerzahlen. Außerdem erhöhte sich die
Produktionszeit bei gleichzeitiger Verringerung der Zuverlässigkeit.
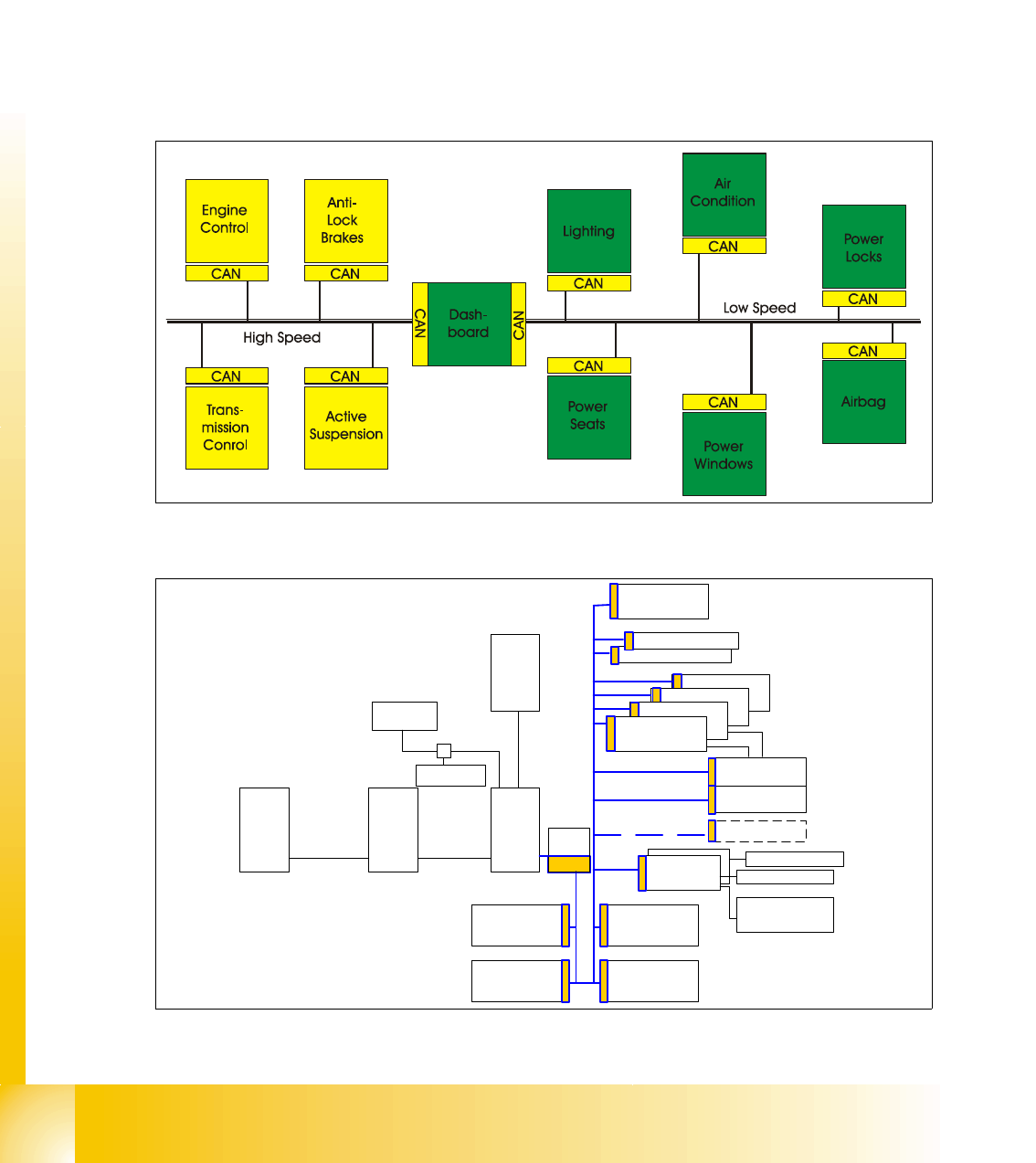
Die Lösung dieses Problems ist die serielle Busverbindung der Einzelkomponenten. Dieses
Bussystem muss verschiedene, speziell aus der Fahrzeugtechnik stammende Notwendigkeiten
erfüllen. Die Punkt zu Punkt Verdrahtung wird durch den weniger aufwendigen CAN-Bus ersetzt.
Jedes Modul erhält eine CAN Bus Anschaltung. Diese stellt alle Busprotokoll und Übertragungs-
regeln sicher.
Abb. 3.3 - 3 Kommunikation über den CAN-Bus
Abb. 3.3 - 4 CAN Kommunikation in der HF Plattform
I/O Slio Board (SUB)
Transport
control
camera Illumination
control Board
Head Board gantry 3
Axis controller Board
Axis controller Board
Axis controller Board
I/O Slio Board (Main)
Line
computer
Station
computer
Machine
controller
LAN
Vision
system
MVS 100
H S
3
L Bus
Axis controller Board
Comp. table
controller
CAN Bus
Comp. table
controller
Comp.
Barcode
Transport
control
communi
cation
board
LAN
Comp. table
controller
Comp. table
controller
TSP 1 actors
PCB-Barcode
Keyboard
camera Illumination
control Board
Head Board gantry 1
TSP 2 actors