SG_FSE_SiplaceHF_HF3_00193900-05_de.pdf - 第79页
1 - 1 1 S tudent Guide SIPLACE HF/HF3 Ausgabe 09/2005 3 Kommunikation und S teuerung 11 3.3.2 Allgemeines zum CAN-Bus – CAN ist ein serielles Bussystem und wurde sp eziell für die Netzwerktech nik von Sensoren und Aktore…
1 - 10
Student Guide SIPLACE HF/HF3
3 Kommunikation und Steuerung Ausgabe 09/2005
10
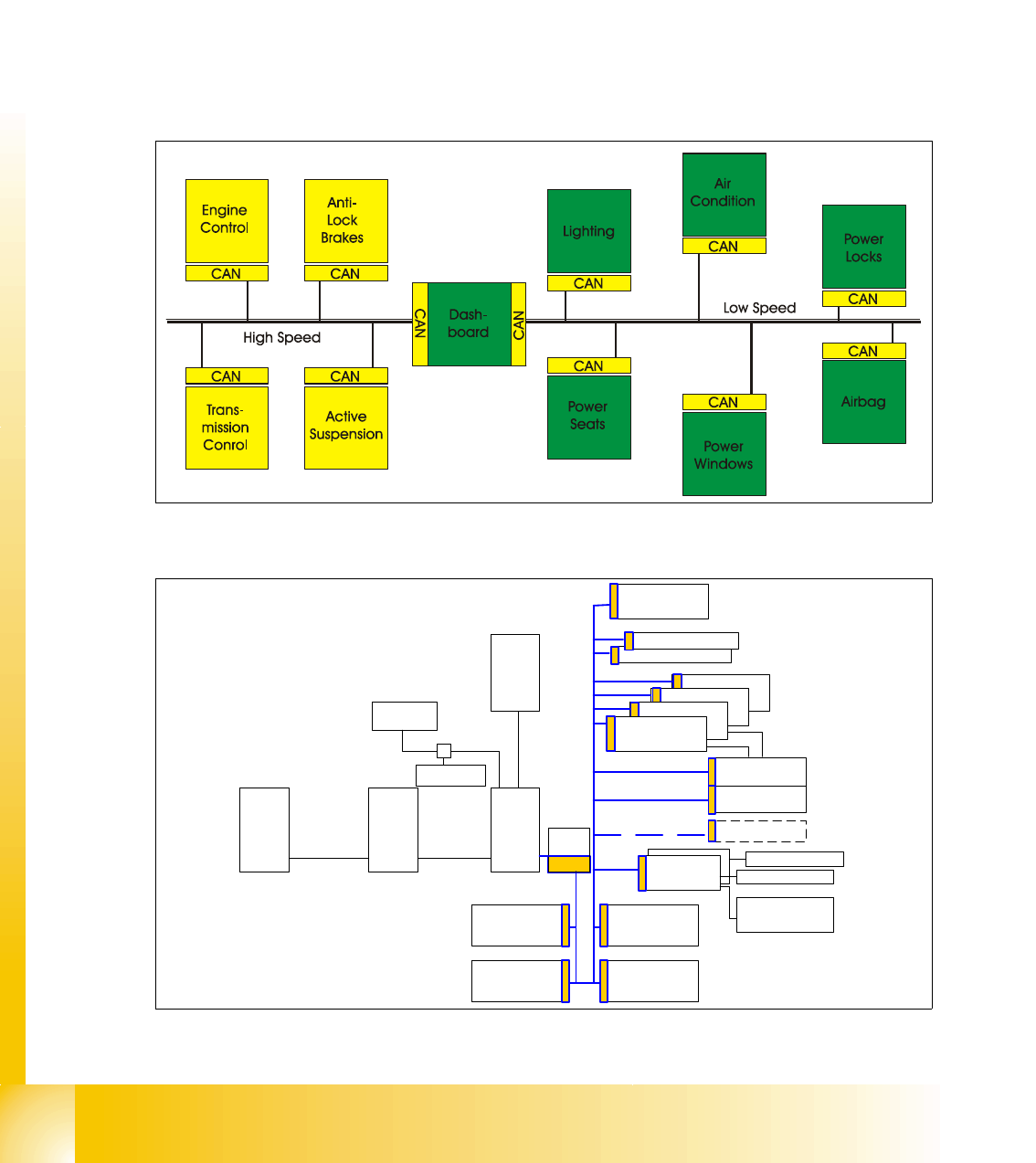
Um das Fahrzeugverhalten weiterzuentwickeln war es nötig, dass die verschiedenen Steuerungs-
systeme und deren Sensoren Informationen austauschen. Dies wurde ursprünglich mit einer
Punkt zu Punkt Verdrahtung der Einzelkomponenten ausgeführt. Diese Notwendigkeit erhöhte
Kabelbaumlängen auf Kilometer und ebenfalls die Steckerzahlen. Außerdem erhöhte sich die
Produktionszeit bei gleichzeitiger Verringerung der Zuverlässigkeit.
Die Lösung dieses Problems ist die serielle Busverbindung der Einzelkomponenten. Dieses
Bussystem muss verschiedene, speziell aus der Fahrzeugtechnik stammende Notwendigkeiten
erfüllen. Die Punkt zu Punkt Verdrahtung wird durch den weniger aufwendigen CAN-Bus ersetzt.
Jedes Modul erhält eine CAN Bus Anschaltung. Diese stellt alle Busprotokoll und Übertragungs-
regeln sicher.
Abb. 3.3 - 3 Kommunikation über den CAN-Bus
Abb. 3.3 - 4 CAN Kommunikation in der HF Plattform
I/O Slio Board (SUB)
Transport
control
camera Illumination
control Board
Head Board gantry 3
Axis controller Board
Axis controller Board
Axis controller Board
I/O Slio Board (Main)
Line
computer
Station
computer
Machine
controller
LAN
Vision
system
MVS 100
H S
3
L Bus
Axis controller Board
Comp. table
controller
CAN Bus
Comp. table
controller
Comp.
Barcode
Transport
control
communi
cation
board
LAN
Comp. table
controller
Comp. table
controller
TSP 1 actors
PCB-Barcode
Keyboard
camera Illumination
control Board
Head Board gantry 1
TSP 2 actors
1 - 11
Student Guide SIPLACE HF/HF3
Ausgabe 09/2005 3 Kommunikation und Steuerung
11
3.3.2 Allgemeines zum CAN-Bus
– CAN ist ein serielles Bussystem und wurde speziell für die Netzwerktechnik von Sensoren
und Aktoren in einem System oder Subsystem entwickelt.
– CAN ist ein serielles Bussystem mit Multimaster Fähigkeiten, d.h. Buszugriffe können
gleichzeitig gestartet werden.
– Im CAN Netzwerk gibt es keine Adressierung der Einzelkomponenten im herkömmlichen
Sinn, sondern priorisierte Meldungen werden an alle Teilnehmer gesendet (broadcasting).
Jeder Teilnehmer entscheidet dann, ob er diese Information bearbeitet oder nicht. Der Iden-
tifier entscheidet ob dieser Buszugriff im Vergleich zu einer anderen Meldung / Nachricht
sofort erfolgt oder verzögert wird. Die Programmierung ist vergleichsweise einfach durch
die relative simple CAN-Bus Kommunikation.
– Jede CAN Nachricht kann 0 bis 8 Byte Benutzerinformation übertragen. Längere Nachrich-
ten kann man durch segmentierte, d.h. vereinzelte Datenblöcke übertragen. Die maximale
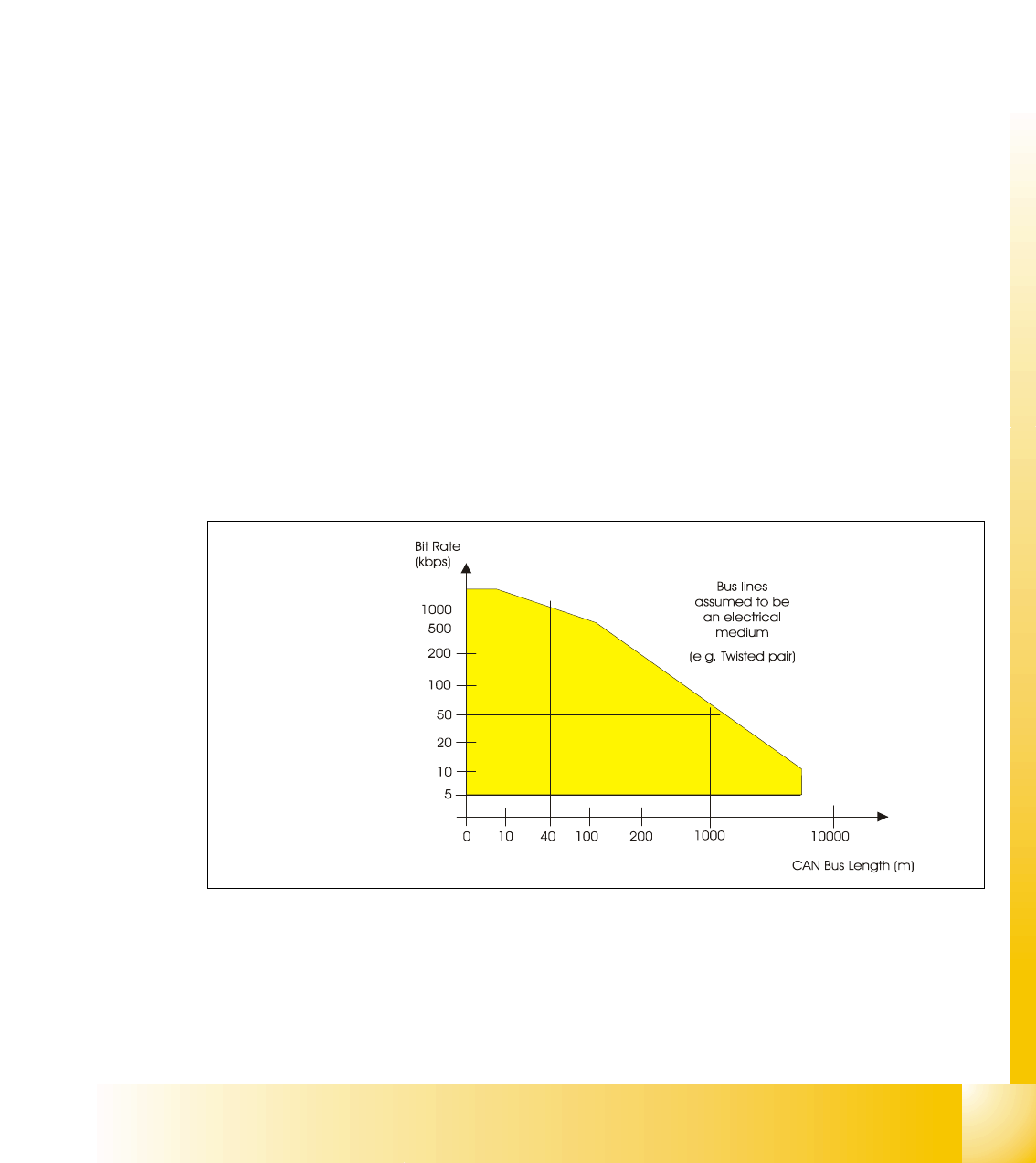
Übertragungsrate wird mit 1 Mbit/s spezifiziert. Dieser Wert wird in Netzwerken mit bis zu
40 m Länge erreicht. Größere Entfernungen reduzieren die Übertragungsrate z. Bsp. bei
einer Länge von 500 m ungefähr 125 Kbits oder bei 1 km Länge ungefähr 50 Kbit/s.Jede
CAN-Botschaft kann maximal 8 Byte an Benutzernachrichten übermitteln. Natürlich können
mittels Segmentierung auch längere Dateninformationen übermittelt werden. Die maximale
Datenübertragungsgeschwindigkeit beträgt 1 Mbit/s bei einer Buslänge von ca. 40 m. Bei
größeren Distanzen muss die Datenrate reduziert werden:
Bei Distanzen bis zu 500 m ist eine Geschwindigkeit von 125 kbit und bei Übertragungen
bis zu 1 km eine Geschwindigkeit von 50 kbit/s möglich.
3
I
Abb. 3.3 - 5 CAN-Bus-Länge
Die maximale Busgeschwindigkeit 1 MBaud und wird bei einer Buslänge von 40 m durch Verwen-
dung eines Twisted-Pair Kabels erreicht. Bei größeren Längen als 40 m muss die Geschwindig-
keit reduziert werden. Eine Buslänge über 1000 m erfordert spezielle Treiber.
1 - 12
Student Guide SIPLACE HF/HF3
3 Kommunikation und Steuerung Ausgabe 09/2005
12
3.3.2.1 11-Bit Identifier
Das CAN-Bussystem verwendet den 11-Bit-Identifier zur Adressierung der versch. CAN-Objekte.
Abb. 3.3 - 6 11-Bit-Identifier
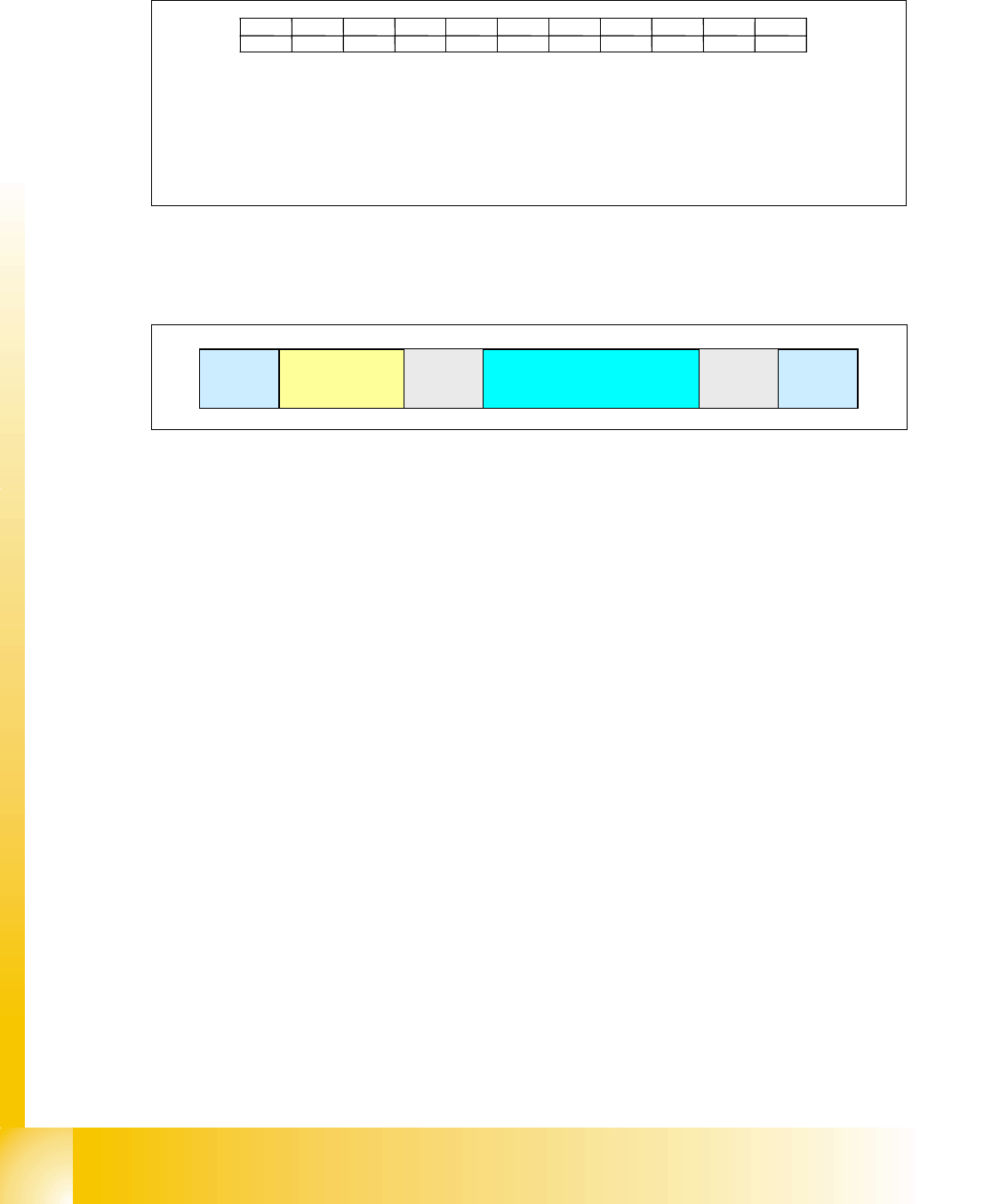
3.3.2.2 CAN-Bus-Protokoll
Abb. 3.3 - 7 CAN-Bus-Protokoll
Start:
– Diese Bit kennzeichnet den Beginn eines Telegramms und besteht aus einem dominanten Bit.
Ein TN kann mit der Arbitrierung nur beginnen, solange sich der Bus im Ruhezustand befindet.
Adressenfeld (11 Bit Identifier):
– Der Wert des 11 Bit Identifier entscheidet über den Buszugriff. Der niedrigere Wert besitzt die
höhere Priorität.
Steuerfeld:
– Die 4 niedrigsten Bit des 6 Bit Feldes geben die Datenlänge des nachfolgenden Datenfeldes
in Bytes an (DLC: data length code).
Datenfeld:
– Enthält die eigentliche Nutzinformation und kann 0 bis 8 Byte umfassen. Die Übertragung ei-
nes Bytes beginnt mit dem höchstwertigen Bit.
Datensicherungsfeld CRC:
– Besteht aus einer 15 Bit Prüfsequenz (CRC Sequence + CRC Delimiter = CRC Field - Cyclic
Redundancy Check), sowie einem rezessiv übertragenem Begrenzungsbit. Mit der in der Prüf-
sequenz enthaltenen redundanten Information kann der Empfänger nachprüfen, ob die
empfangene Nachricht durch Störeinwirkungen verfälscht wurde.
Ende:
– Jedes Datentelegramm wird durch eine Bitsequenz von 7 rezessiven Bits abgeschlossen.
Bit 10 Bit 9 Bit 8 Bit 7 Bit 6 Bit 5 Bit 4 Bit 3 Bit Bit 1 Bit 0
KKCCCCPPTTT
Knotentyp (K) CAN Objekt (C) Portalnummer (P) Telegrammtyp (T)
Abhängig vom
Knotentyp
00: Sektor 1 000 Kommando
01: Sektor 2 001 Nachricht
10: Sektor 3
11: Sektor 4
00: Köpfe
01: Achsen
10: BE-Tische
11: reserviert
Start
Adresse
(11 bit Kennung)
Steuer-
information.
Daten (0-8 Bytes
Benutzerinformation)
CRC
Ende