SG_FSE_SiplaceHF_HF3_00193900-05_de.pdf - 第83页
1 - 15 S tudent Guide SIPLACE HF/HF3 Ausgabe 09/2005 3 Kommunikation und S teuerung 15 3.3.3 CAN-Bus Konzept an der HF-Maschine (bis MA.Nr .xx) Der Bestückautomat SIPLACE HF verwendet ein Bussy stem mit einer Datenübertr…
1 - 14
Student Guide SIPLACE HF/HF3
3 Kommunikation und Steuerung Ausgabe 09/2005
14
Dadurch wird sichergestellt, das bei gleichzeitiger Belegung des Busses durch mehrere TN immer
nur ein TN am Bus bleibt. Die von diesem TN gesendete Nachricht wird hier nicht zerstört, so das
wir von einer ’verlustlosen’ Arbitrierung sprechen. Arbitrierung (engl. Arbitration) bedeutet über-
setzt ’Schiedsgericht’.
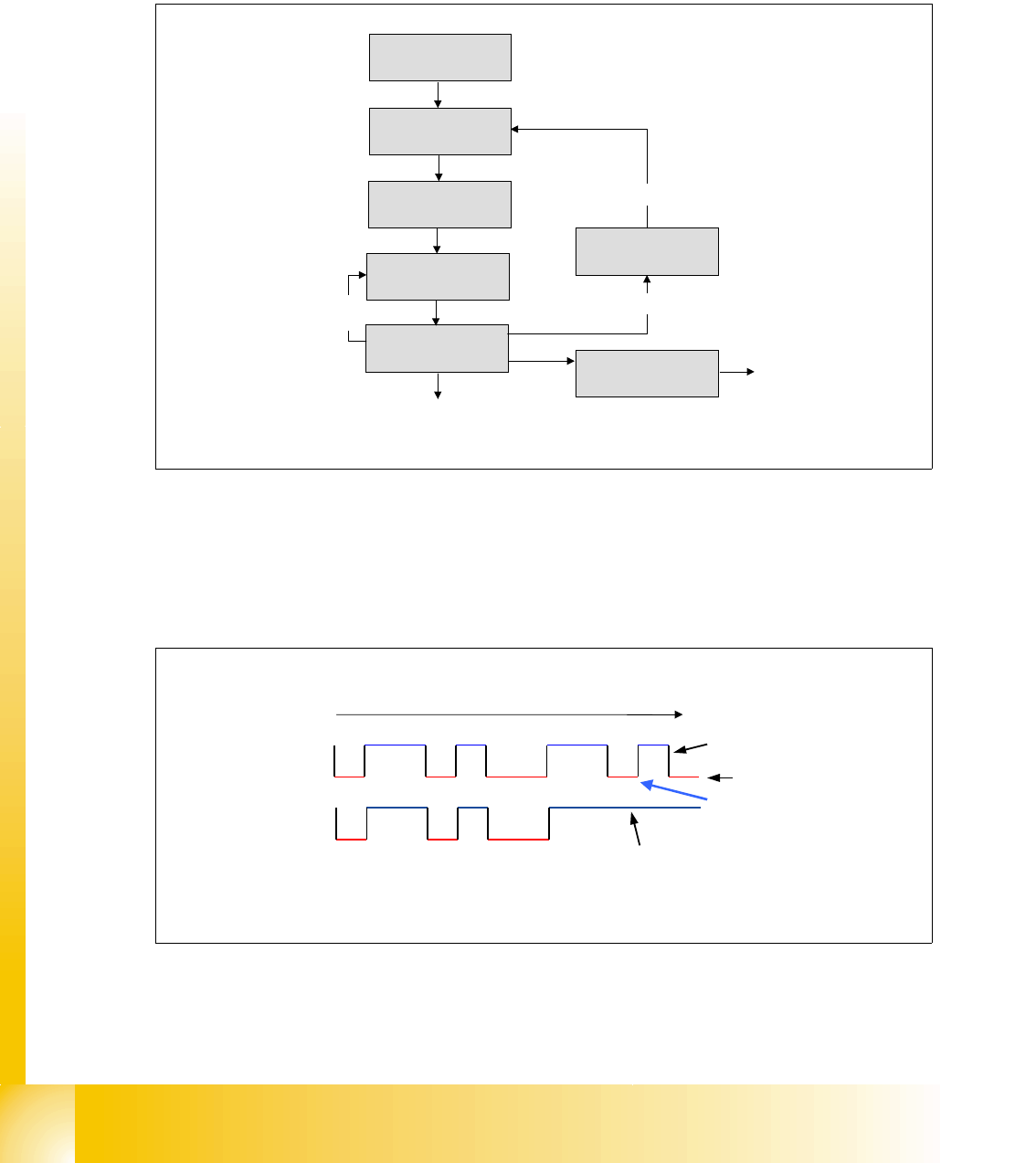
Arbitrierung: Zustandsdiagramm
Abb. 3.3 - 9 Zustandsdiagramm Arbitrierung
Es existieren zwei Buszustände während der Arbitrierung, ’dominant’ und ’rezessiv’. Die Logik ist
durch einen Wire-AND Mechanismus realisiert.
Im Beispiel dargestellt die Arbitrierung durch bitweises Abtasten der Identifier von 2 TN.
3
Abb. 3.3 - 10 CAN-Bus Arbitrierung mit 2 Teilnehmer
Warten auf freien Bus
Aufschalten Bit SoF
Empfangszustand
Aufschalten des
1. Arbitrierungsbits
Vergleich Buspegel mit
aufgeschaltetem Bit
Fehlerzustand
Arbitrierung verloren
rezessives Bit auf dominanten Bus aufgeschalten
sind alle Arbitrierungsbits aufgeschalten,
erfolgt das Senden von Steuer- und Datenfeld
Aufschalten
weiterer Bits
Start: ein TN sendet
eine Nachricht
11 10 9 8 7 6 5 4 3 2 1 0
rezessives Bit (Logikpegel high)
dominantes Bit (Logikpegel low)
TN 1 gewinnt hier die Arbitration
TN 2 verliert hier die Arbitrierung
und wechselt in den Zustand
empfangen
Identifier TN 1 1
Bit
Identifier TN 2 2
1 - 15
Student Guide SIPLACE HF/HF3
Ausgabe 09/2005 3 Kommunikation und Steuerung
15
3.3.3 CAN-Bus Konzept an der HF-Maschine (bis MA.Nr.xx)
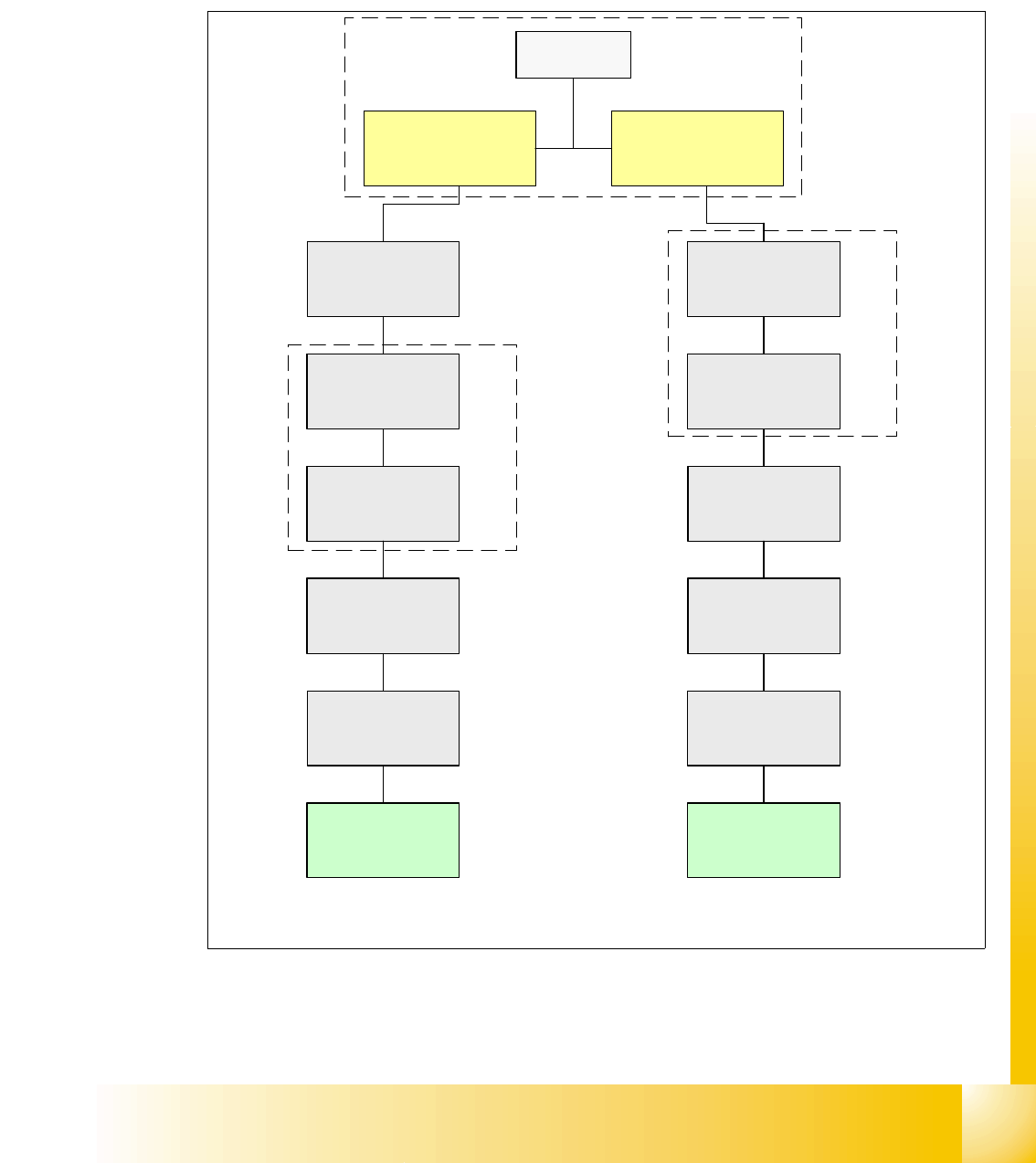
Der Bestückautomat SIPLACE HF verwendet ein Bussystem mit einer Datenübertragungs-
geschwindigkeit von 1 Mbit/s. Das CAN-Bus-System beginnt an der Kommunikationsplatine und
ist in 2 Pfade unterteilt. Jeder Pfad endet mit einem 120 Ohm Abschlusswiderstand am CAN-Bus-
board des jeweiligen Bestückkopfes.
Abb. 3.3 - 11 Gesamtübersicht CAN-Bus (alte Verdrahtung)
SMP BUS
MC
MC
CAN Busleitung 2
CAN Busleitung 1
Computer Unit
* SW Update 504 --> 505 Portal 2 wird zu Portal 3
COM Baugruppe
(links)
COM Baugruppe
(rechts)
Schlepp- Interface
Portal 1
CAN E/A
Modul
Sektor 4
CAN E/A
Modul
Sektor 4
CAN E/A
Modul
Sektor 4
CAN E/A
SUB Modul
Sektor 4
Transport
Steuerung
Vision
Steuereinheit
Sektor 4
BE-Tisch 1
Gurtschneider
BE-Tisch 4 / MTC
Gurtschneider
SUB Distributer Sektor 4
Axis unit
BB 2
Schlepp-Interface
Portal 2*
Vision
Steuereinheit
Sektor 2
BE-Tisch 2 / MTC
Gurtschneider
CAN E/A
Main Modul
Sektor 2
BE-Tisch 3
Gurtschneider
Main Distributer Sektor 4
1 - 16
Student Guide SIPLACE HF/HF3
3 Kommunikation und Steuerung Ausgabe 09/2005
16
3.3.4 CAN-Bus Konzept an der HF-Maschine (ab MA.Nr.xx)
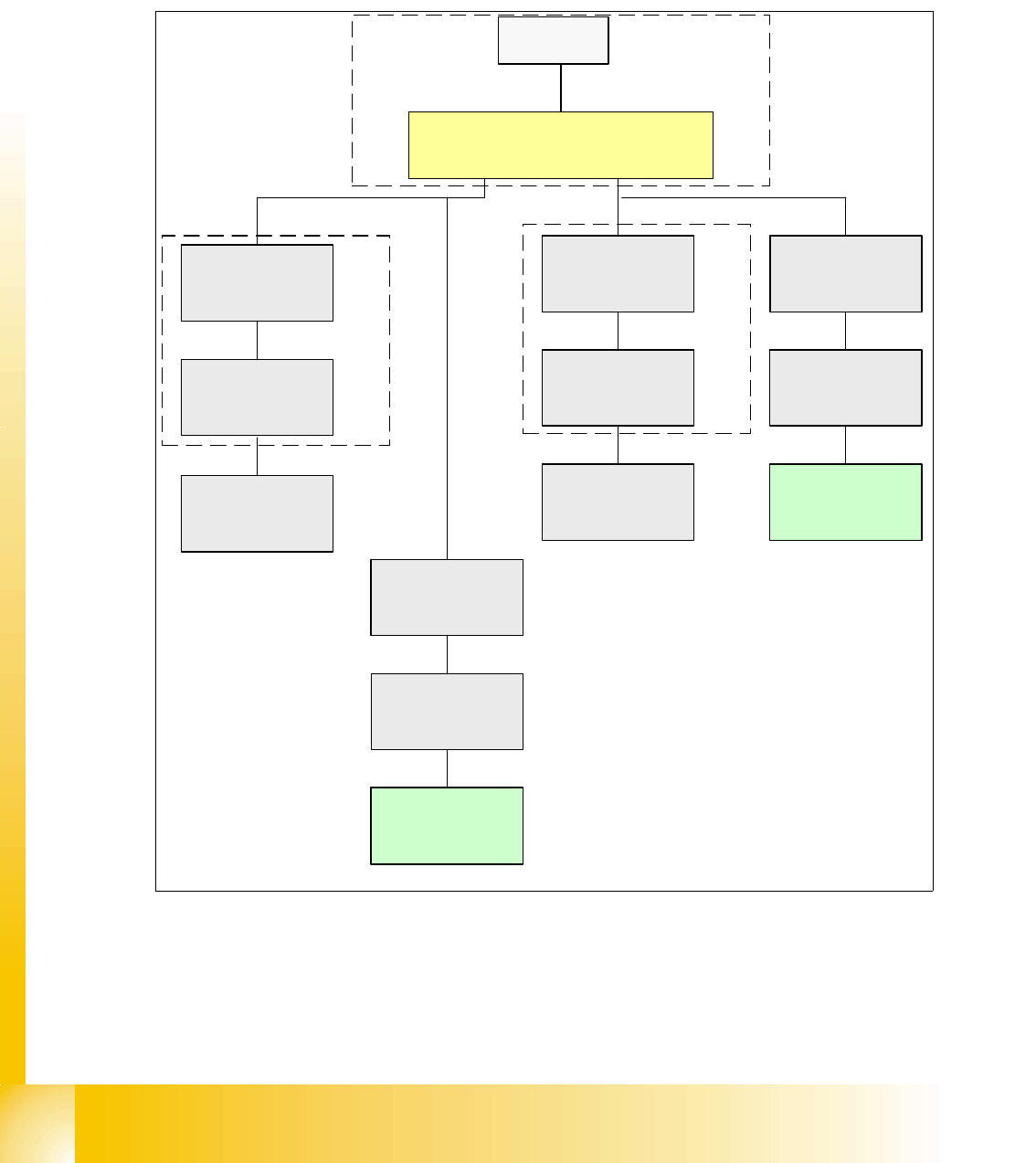
Der Bestückautomat SIPLACE HF verwendet ein Bussystem mit einer Datenübertragungs-
geschwindigkeit von 1 Mbit/s. Das CAN-Bus-System beginnt an der Kommunikationsplatine und
ist in 2 Pfade unterteilt. Jeder Pfad endet mit einem 120 Ohm Abschlusswiderstand am CAN-Bus-
board des jeweiligen Bestückkopfes.
Abb. 3.3 - 12 Gesamtübersicht CAN-Bus (neue Verdrahtung)
SMP BUS
MC
MC
CAN Busleitung 2
Computer Unit
Vision
Steuereinheit
Sektor 2
CAN E/A
Main Modul
Sektor 2
Main Distributer Sektor 4
CAN Busleitung 1
Schlepp-Interface
Portal 1
Transport
Steuerung
BE-Tisch 1
Gurtschneider
CAN E/A
Modul
Sektor 4
CAN E/A
Modul
Sektor 4
CAN E/A
Modul
Sektor 4
CAN E/A
SUB Modul
Sektor 4
Vision
Steuereinheit
Sektor 4
BE-Tisch 4 / MTC
Gurtschneider
SUB Distributer Sektor 4
BE-Tisch 2 / MTC
Gurtschneider
BE-Tisch 3
Gurtschneider
Axis unit
BB 2
Schlepp- Interface
Portal 3
COM Baugruppe