00193926-03.pdf - 第121页
Manual do usuário SIPLACE Série HF 3 Dados técnicos Versão de software SR.50x.xx Edição 01/2006 PT 3.7 Cabeças de montar 121 A est rela roda com os seus 1 2 segmento s em t orno do e ixo estrela . Os se gmentos s ão supo…

3 Dados técnicos Manual do usuário SIPLACE Série HF
3.7 Cabeças de montar Versão de software SR.50x.xx Edição 01/2006 PT
120
PCI. Contrariamente aos clássicos Chipshooter, os doze bocais das cabeças SIPLACE Col-
lect&Place rodam em torno de eixo horizontal. Isto permite não só economizar espaço: devido
ao reduzido diâmetro, também as forças centrífugas são muito mais reduzidas do que com os
Chipshooter clássicos. Assim, o perigo de deslocação de componentes durante o transporte fica
largamente eliminado. 3
Mas há ainda uma outra vantagem: a duração do impulso da cabeça Collect&Place é igual para
todos os componentes. Isso significa que a velocidade da montagem é independente das di-
mensões dos componentes. 3
Funções de controle e auto aprendizagem 3
Diferentes funções de controle e auto aprendizagem aumentam a confiabilidade da cabeça Col-
lect&Place. 3
– Testes de vácuo nos bocais mostram, por exemplo, se o componente foi retirado ou colocado
corretamente.
– Por meio de um traço de marcação no alimentador, é determinada a posição de coleta exata
dos componentes no alimentador.
– Uma câmara na cabeça de montar determina a localização rigorosa de cada CO no bocal.
Desvios em relação à posição de recolha são corrigidos mesmo antes da montagem. Na con-
tinuação da recolha de CO, é tomada em consideração a média dos desvios das 10 últimas
operações de montagem. Desta forma, aumenta ainda mais a precisão da recolha.
– Além disso, também é verificada a forma da caixa. Se os dados geométricos determinados
forem diferentes dos dados programados, o componente não é montado.
– O eixo vertical (eixo Z) para a recolha e a montagem dos CO trabalha no modo de Sensor
Stop. Desta forma, na montagem são compensadas diferenças de altura na recolha e irregu-
laridades das PCI. A média dos desvios das 10 últimas operações de montagem também é
considerada para a adaptação da velocidade de subida e de montagem. Entretanto, a força
de colocação programada permanece constante.
– Para aumento da segurança na montagem, pode ser instalado um sensor de CO na cabeça
C&P. O sensor de componentes verifica, além da presença do CO no bocal, também a rela-
ção das arestas do componente. Desta forma, é possível determinado se o CO foi retirado
do bocal em posição atravessada ou ao alto.
– Por meio do módulo de visão DCA, a cabeça Collect&Place de 12 segmentos pode centrar
opticamente e montar componentes de 0,6 x 0,3 mm² até 13 x 13 mm². Na montagem de
Flip-Chips de alta velocidade e de componentes Bare Die, o módulo de visão DCA otimiza a
velocidade e a precisão. Os valores estão indicados na Tabela na página 122
.
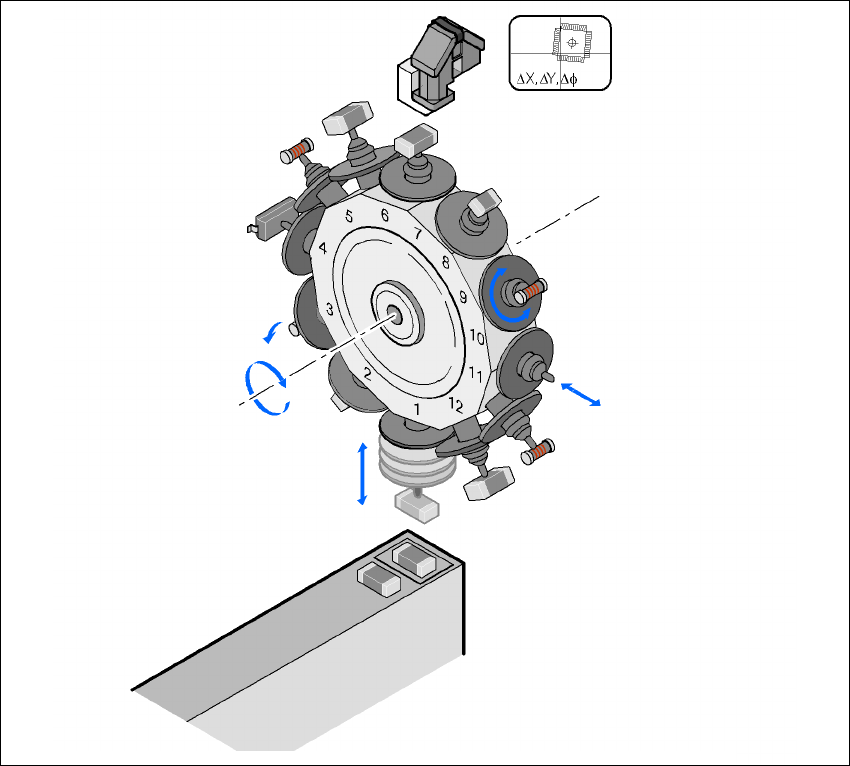
3.7.2.2 Descrição do funcionamento
A cabeça Collect&Place de 12 segmentos possui três eixos: o eixo DR ou eixo de estrela, o eixo
Z e o eixo DP. 3
Manual do usuário SIPLACE Série HF 3 Dados técnicos
Versão de software SR.50x.xx Edição 01/2006 PT 3.7 Cabeças de montar
121
A estrela roda com os seus 12 segmentos em torno do eixo estrela. Os segmentos são suportes
dos tubos. Em cada tubo está assente um bocal. Desta forma, os componentes são aspirados
e transportados da posição de recolha/montagem (1) para a posição de rejeição (3), para a po-
sição de centragem óptica (7) ou para a posição de rotação (9). 3
O eixo Z executa um movimento vertical. Cada tubo que se encontra na posição mais baixa da
estrela (1) é subida ou descida por este eixo. Desta forma, os componentes são retirados dos
alimentadores e colocados na PCI. Ao eixo Z é dado o nome de "eixo inteligente". "Regista" a
altura de coleta de cada trilha do alimentador e a altura de montagem para cada componente.
Assim, é possível acelerar o processo de montagem. A força de colocação programada é man-
tida constante. 3
3
Fig. 3.7 - 5 Descrição do funcionamento
O eixo DP roda o componente centrado opticamente para a posição pretendida para a monta-
gem. As sequências do movimento dos eixos de rotação e também dos eixos de translação são
comandadas por circuitos de regulação. Sensores para a posição e para a velocidade transmi-
tem os valores reais do movimento dos eixos ao comando dos mesmos. A partir da comparação
Câmara de componentes
Eixo DP
Rodar o CO para a posição
de montagem
Recolher ou colocar o tubo
Eixo Z
Recolha ou montagem do CO
Eixo estrela
Rotação da estrela
Rejeitar o CO
3 Dados técnicos Manual do usuário SIPLACE Série HF
3.7 Cabeças de montar Versão de software SR.50x.xx Edição 01/2006 PT
122
entre os valores teóricos e reais, são determinados os parâmetros da força e da velocidade para
os servoamplificadores e, portanto, o movimento a realizar pelos eixos. Os valores do vácuo no
bocal são permanente controlados eletronicamente durante todo o processo de recolha e de
montagem para que a taxa de erros seja a mais reduzida possível. 3
3.7.2.3 Dados técnicos
3
3
*) Por favor tenha em conta que a gama de CO passíveis de equipar é influenciada também pela geometria do pad,
pela norma específica do cliente e pelas tolerâncias das embalagens de componentes.
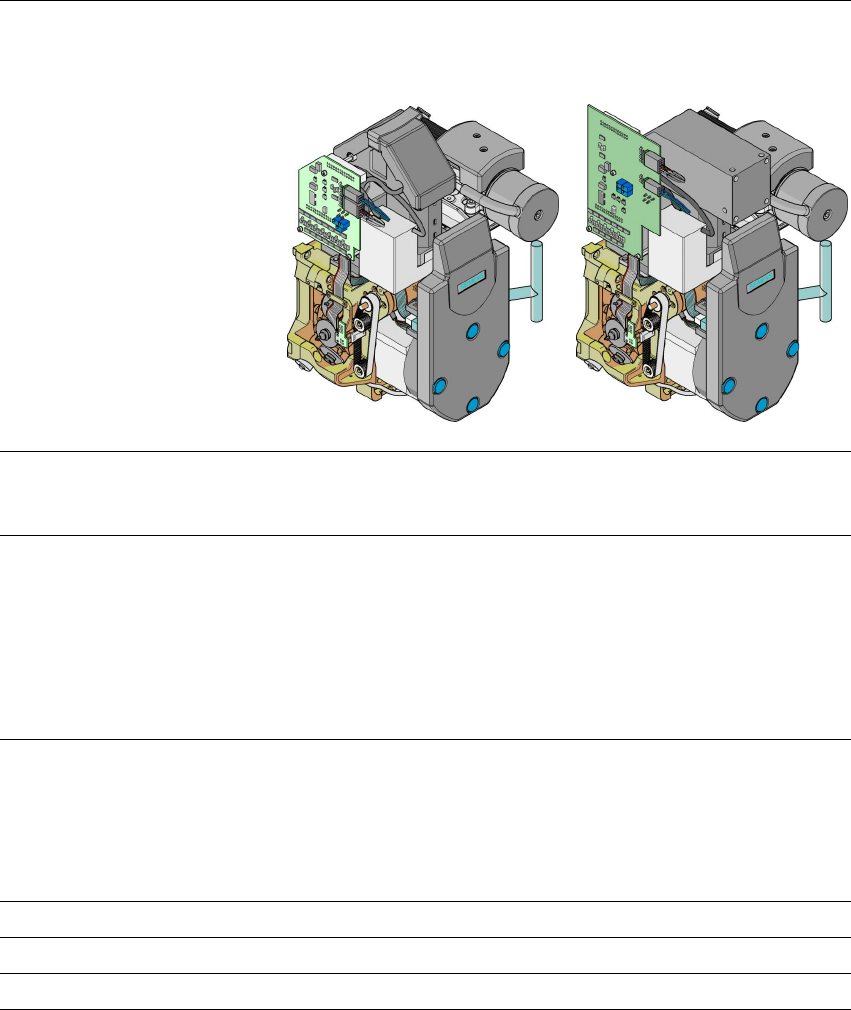
Cabeça Collect&Place de
12 segmentos com câmara de
componentes standard (24x24)
Cabeça Collect&Place de
12 segmentos com
câmara DCA
Gama de componentes *) 0201 até PLCC44, BGA,
µBGA, Flip-Chip, TSOP, QFP,
SO até SO32, DRAM
0201 até Flip-Chip, Bare Die
Especificação do componente
Altura máx.
Retícula mín. dos pinos
Retícula mín. de Ball
Diâmetro mín. de Ball
Dimensões mín.
Dimensões máx.
Peso máx.
6 mm
0,5 mm
0,35 mm
0,2 mm
0,6 x 0,3 mm²
18,7 x 18,7 mm²
2 g
6 mm
0,4 mm
0,2 mm
0,11 mm
0,6 x 0,3 mm²
13 x 13 mm²
2 g
Escalão de força programada
1
2
3
4
5
Força de colocação programada [N]
2,4 ± 0,5
2,4 ± 0,5
3 + 1
4 + 1
5 + 1
Tipos de bocais 9xx 9xx
Precisão de centragem X/Y ± 45 µm/3 σ, ± 60 µm/4 σ ± 41 µm/3 σ, ± 55 µm/4 σ
Precisão angular ± 0,5°/3 σ, ± 0,7°/4 σ ± 0,5°/3 σ, ± 0,7°/4 σ