00193926-03.pdf - 第130页
3 Dados técnicos Manual do usuário SIPLACE Série HF 3.7 Cabeças de montar Versão de software SR.50x. xx Edição 01/2006 PT 130 O eixo DP rod a o com ponente c entrado o pticam ente para a po sição p retend ida para a m on…

Manual do usuário SIPLACE Série HF 3 Dados técnicos
Versão de software SR.50x.xx Edição 01/2006 PT 3.7 Cabeças de montar
129
3.7.4.1 Descrição
Esta cabeça de montar altamente evoluída é composta por duas cabeças de montar do mesmo
tipo (TwinHead ou gémeas) ligadas entre si que trabalham segundo o princípio Pick&Place. O sis-
tema TwinHead é próprio para a maquinagem de componentes particularmente exigentes e gran-
des. Dois componentes são retirados da cabeça de montar, centrados opticamente no trajecto
para a posição de montagem e rodados para a necessária posição de montar. Seguidamente, são
colocados sobre a PCI com suavidade e na posição rigorosa por meio de sopro de ar regulado.3
Para o sistema TwinHead foram estudados novos bocais (Tipo 5xx). Um adaptador permite utili-
zar também os bocais da cabeça Pick&Place do Tipo 4xx e os bocais das cabeças Collect&Place
dos Tipos 8xx e 9xx. 3
Funções de controle e de auto aprendizagem 3
Diferentes funções de controlo e auto aprendizagem aumentam a confiabilidade do sistema
TwinHead. 3
– Testes de vácuo nos bocais mostram, por exemplo, se o componente foi retirado ou colocado
corretamente.
– Módulos de visão de alta resolução e inteligentes - como p.ex. módulos de visão Fine-Pitch
e Flip-Chip – detectam os mais pequenos desvios da posição do CO, corrigem os mesmos
e garantem, assim, uma posição de montagem correta. As câmaras de componentes estão
colocadas de forma estacionária no quadro da máquina.
– Além disso, também é verificada a forma da caixa. Se os dados geométricos determinados
forem diferentes dos dados programados, o componente não é montado.
– As forças de colocação previamente definidas para os componentes são medidas e contro-
ladas por um sensor de força.
– Em caso de falha de ar comprimido ou de corrente elétrica, o eixo vertical (eixo Z) sobe para
uma posição segura para evitar um embate da cabeça.
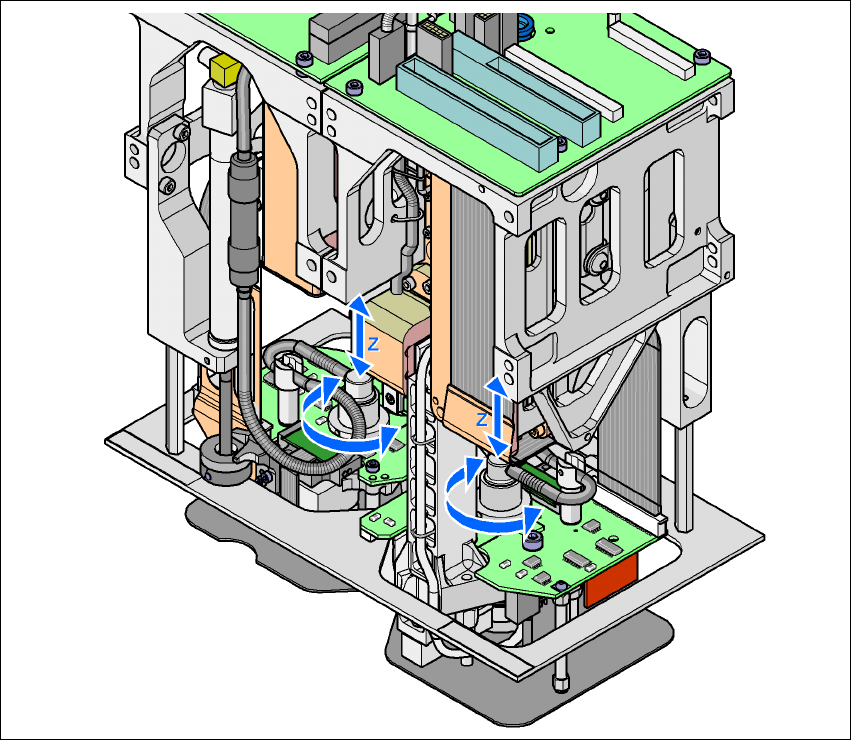
3.7.4.2 Descrição do funcionamento
A TwinHead é composta por duas cabeças Pick&Place acopladas entre si, comandadas indepen-
dentemente uma da outra. Cada cabeça possui dois eixos: o eixo Z e o eixo DP (veja a Fig. 3.7
- 8). 3
O trajecto de deslocação do eixo Z é registado por um sistema linear de medição incremental
de alta resolução. O eixo Z executa um movimento vertical. Um motor linear faz subir e descer
o eixo Z. Desta forma, componentes são retirados de alimentadores ou de bandejas e descidos
sobre a PCI. Ao eixo Z é dado o nome de "eixo inteligente". "Regista" a altura de recolha de cada
trilha do alimentador e a altura de montagem para cada componente. Assim, é possível acelerar
o processo de montagem. A força de colocação programada é medida e controlada por um sen-
sor de força. 3
3 Dados técnicos Manual do usuário SIPLACE Série HF
3.7 Cabeças de montar Versão de software SR.50x.xx Edição 01/2006 PT
130
O eixo DP roda o componente centrado opticamente para a posição pretendida para a monta-
gem. O eixo de rotação é acionado por um motor passo a passo. O veio do motor constitui o
tubo. Na extremidade superior está fixado o disco de incrementos para a avaliação angular e na
extremidade inferior está o dispositivo de sujeição para o bocal. 3
As sequências do movimento dos eixos de rotação e também dos eixos de translação são co-
mandadas por circuitos de regulação. Sensores para a posição e para a velocidade transmitem
os valores reais do movimento dos eixos ao comando dos mesmos. A partir da comparação en-
tre os valores teóricos e reais, são determinados os parâmetros da força e da velocidade para
os servoamplificadores e, portanto, o movimento a realizar pelos eixos. 3
Os valores do vácuo no bocal são permanente controlados eletronicamente durante todo o pro-
cesso de recolha e de montagem para que a taxa de erros seja a mais reduzida possível. 3
3
Fig. 3.7 - 10 Descrição do funcionamento
3
Manual do usuário SIPLACE Série HF 3 Dados técnicos
Versão de software SR.50x.xx Edição 01/2006 PT 3.7 Cabeças de montar
131
3.7.4.3 Dados técnicos
3
3
*) Por favor tenha em conta que a gama de CO passíveis de equipar é influenciada também pela geometria do pad,
pela norma específica do cliente e pelas tolerâncias das embalagens de componentes.
**) Com utilização de bocais normais
Centragem óptica com Câmara de componentes,
estacionária,
P&P (tipo 22) 50 x 40
Câmara de componentes,
estacionária,
P&P (tipo 20) 8 x 8
Gama de componentes *) 0603 até SO, PLCC, QFP, BGA,
componente especial, Bare Die,
Flip-Chip
0201 até SO, PLCC, QFP, casqui-
lho, ficha, BGA, componente espe-
cial, Bare Die, Flip-Chip, chapa de
proteção
Especificação do
componente
Altura máx.
Retícula mín. dos pinos
Retícula mín. de Ball
Diâmetro mín. de Ball
Dimensões mín.
Dimensões máx.
Peso máx.
25 mm (superior a pedido)
0,4 mm
0,56 mm
0,32 mm
1,6 x 0,8 mm²
50 x 40 mm² (medição simples)
No funcionamento com dois bocais:
50 x 50 mm² ou
69 x 10 mm²
No funcionamento com um bocal:
85 x 85 mm² ou
125 x 10 mm²
Máx. 200 x 125 mm² (com limitações)
100 g **)
25 mm (superior a pedido)
0,25 mm
0,14 mm
0,08 mm
0,6 x 0,3 mm²
8 x 8 mm² (medição simples)
100 g **)
Força de colocação
programável
1,0 N - 15 N 1,0 N - 15 N
Tipos de bocais 5 xx (standard)
4 xx + adaptador
8 xx + adaptador
9 xx + adaptador
5 xx (standard)
4 xx + adaptador
8 xx + adaptador
9 xx + adaptador
Distância entre os bocais de
ambas as cabeças
Pick&Place
70,8 mm 70,8 mm
Precisão de centragem X/Y ± 26 µm / 3 σ, ± 35 µm / 4 σ ± 22 µm / 3 σ, ± 30 µm / 4 σ
Precisão angular ± 0,05° / 3 σ, ± 0,07° / 4 σ ± 0,05° / 3 σ, ± 0,07° / 4 σ