JET MOVE 全功能软件 操作说明书 - 第24页
轨道正限位 轨道负限位 轨道 1 调 宽 轨道 1 工 作宽 度 L1 轨 道 1 调 宽 行 程 L 标定流程 示意图 负限位 正限位 L-L1 轨道示意图 操作步骤 : A 、在轴配置界 面设置轨道调宽 行程为 L ,在轨道配置 界面设置轨道 工作宽度为 L1 ; B 、 正对机 台: 在轴配置界面, 确定轨道远离人的方 向为正方向、 靠近人的方向为负方 向 ; C 、 点 击标定轨道按钮 , 轨道首先往 正方向运动, 碰到正 限位…
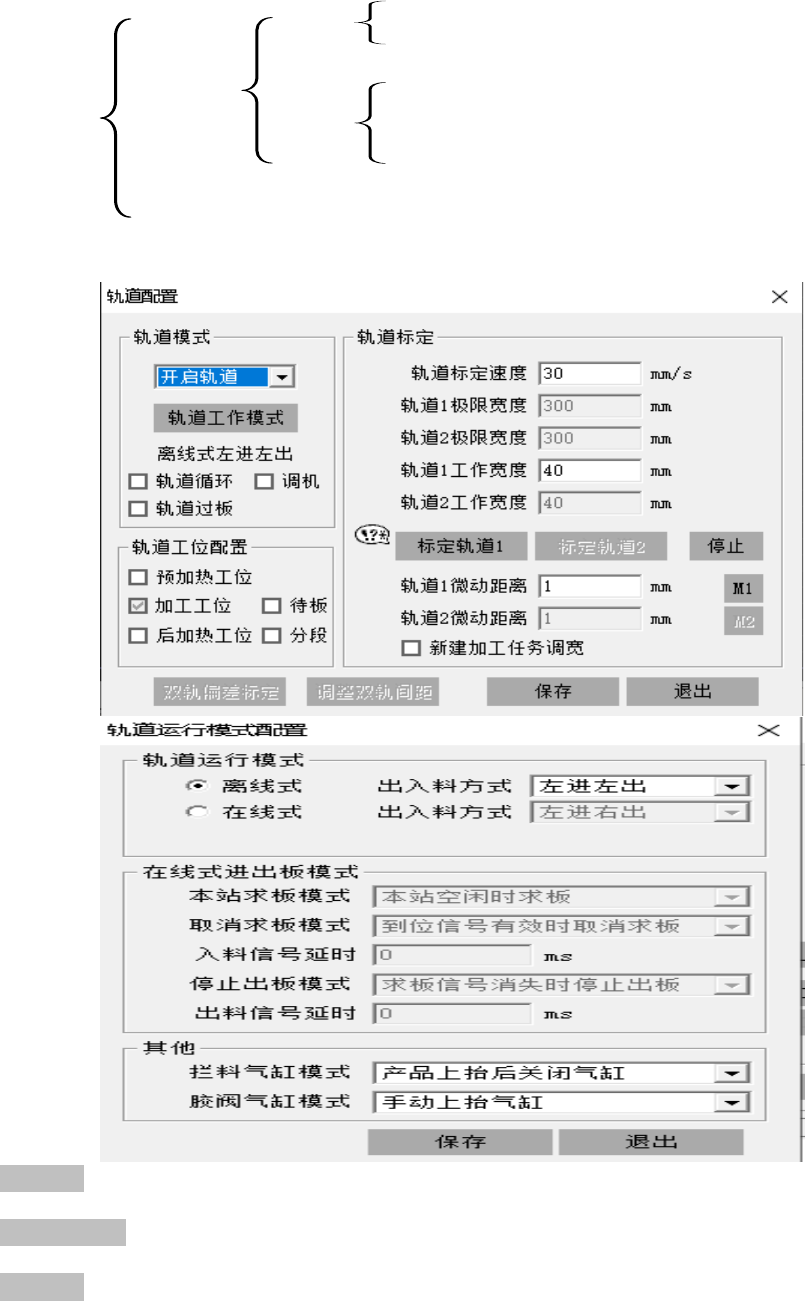
3.4.6 轨道模式配置
高速点胶软件提供开启轨道、关闭轨道模式;开启轨道模式下,提供在线式和离线式两种操作模式。
如下图所示:
开启轨道
关闭轨道
在线式
离线式
左进右出
右进左出
右进左出
左进左出
右进右出
左进右出
轨道工位,可选择预加热工位、点胶工位、后加热工位。
轨道配置界面如图所示:
轨道模式
轨道模式区域,选择是否开启轨道,并选择轨道工作模式。
轨道工位配置
在该区域,选择轨道工位的配置。
轨道标定
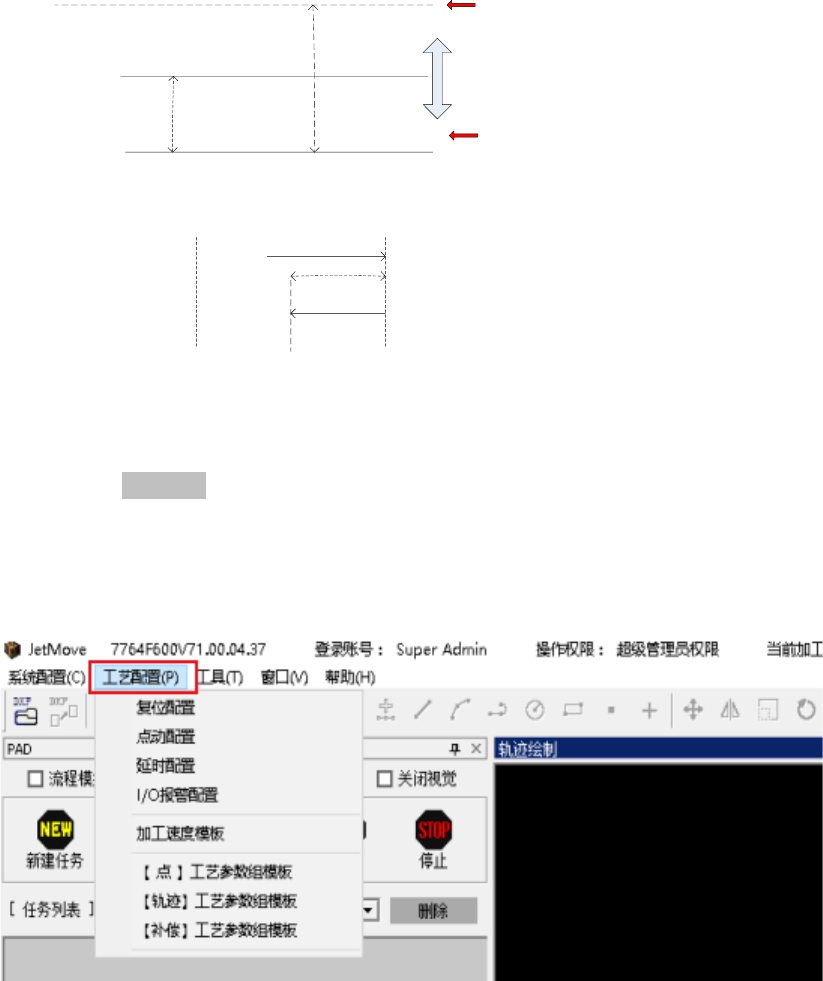
轨道标定的流程示意图:
轨道正限位
轨道负限位
轨道1
调
宽
轨道
1工
作宽
度L1
轨
道
1
调
宽
行
程
L
标定流程
示意图
负限位
正限位
L-L1
轨道示意图
操作步骤: A、在轴配置界面设置轨道调宽行程为 L,在轨道配置界面设置轨道工作宽度为 L1;
B、正对机台:在轴配置界面,确定轨道远离人的方向为正方向、靠近人的方向为负方向;
C、点击标定轨道按钮,轨道首先往正方向运动,碰到正限位后,反向运行 L-L1 的距离后,
停在当前位置,即为设置的轨道工作宽度,标定完成。
4.1.1 工艺配置
4.1.2 复位配置
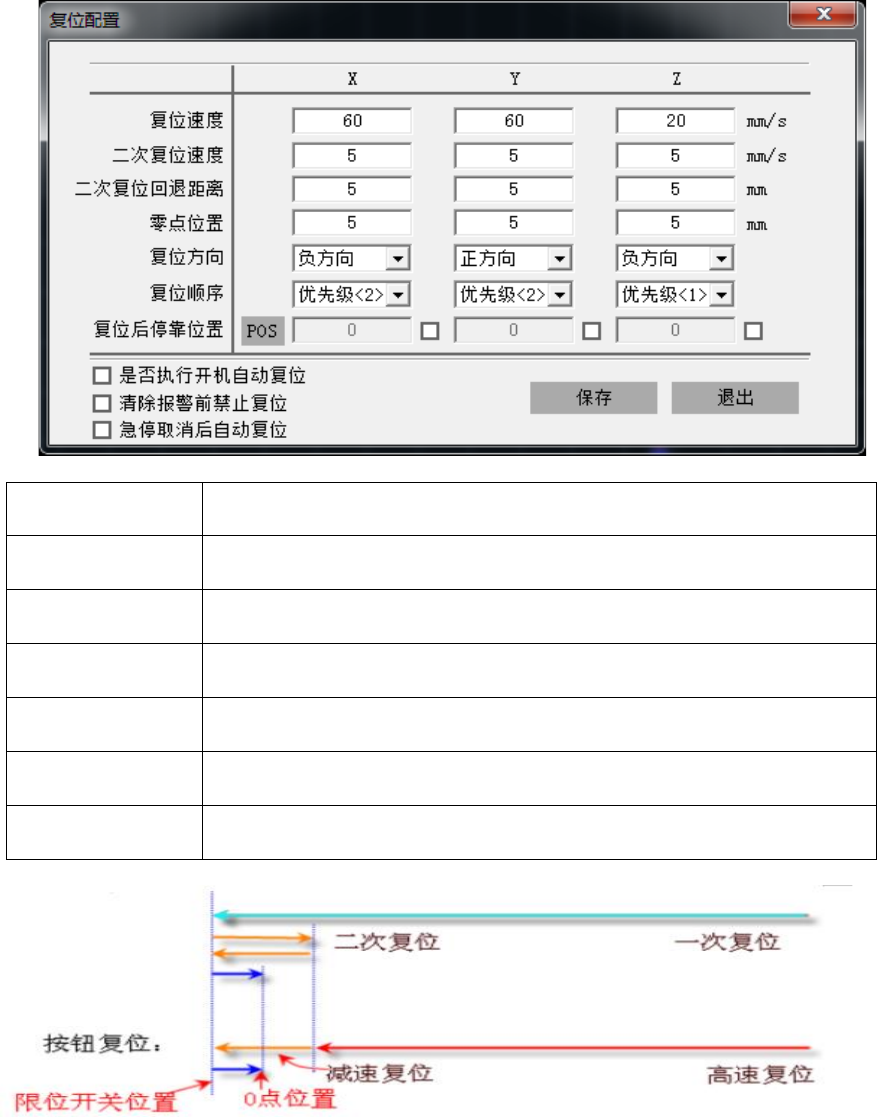
复位速度
分别对应下图中蓝色(一次复位)各个轴的速度。
二次复位速度
对应下图中橙色(二次复位/减速复位)各个轴的速度。
二次复位回退距离
从限位开关到二次复位点的距离,对应下图橙色箭头的距离。
零点位置
从限位开关到 0 点位置的距离,对应下图蓝色箭头的距离
复位方向
设置各轴复位时的正负方向。
复位顺序
置各轴复位时的优先级顺序,设置 1 为先复位 2 为次复位,以此类推。
复位完成停靠位置
复位完成后 X/Y/Z 轴停靠的位置。此位置也为安全位置。
4.1.3 点动配置