Vario Grid Pepperl Fuchs.pdf - 第14页
1 Nachrüstanleitung SOKO Vario Grid Pepperl&Fuchs (00166280-01) SOKO Ausgabe 06/2006 14 23 , 3, // type vacuum tooling = V ARIO GRID 1 24, 0, // no verific ation of clam ping with motor 1 41, 0, // left side fixed, w…

SOKO 1 Nachrüstanleitung SOKO Vario Grid Pepperl&Fuchs (00166280-01)
Ausgabe 06/2006
13
parameter track 1 (and common parameter) 1
1 - list parameter 1
2 - modify parameter 1
3 - save to EEPROM 1
t - change track 1
0 - quit 1
parameter track 1 number:
23 1
1
parameter 23 = 2 "type vacuum tooling = vacuum tooling without vacuum sensor" 1
(0 ..3 , standard 0) 1
do want to modify parameter 23 ? /
y / n) 1
0 - AVSP 1
1 - vacuum tooling with 2 vacuum sensors 1
2 - vacuum tooling without vacuum sensors 1
3 - VARIO GRID 1
1
new value:
3 1
1
parameter 23 = 3 "type vacuum tooling = VARIO GRID" 1
do want to put all changed parameters to EEPROM? (
y / n) 1
parameters saved 1
1
parameter track 1 (and common parameter) 1
1 - list parameter 1
2 - modify parameter 1
3 - save to EEPROM 1
t - change track 1
0 - quit 1
parameter track 1 1
1, 6, // version 1
10, 500, // [mm/s] maximum velocity conveyor 1
11, 350, // [mm/s] velocity drive-in machine 1
12, 350, // [mm/s] velocity drive-out machine 1
13, 50, // [0.1m/s
2
] maximum acceleration 1
14, 60, // [mm/s] velocity laser-light barrier 1
15, 25, // [0.1m/s
2
] deceler.laser-light barrier 1
16, 350, // [mm/s] velocity sensor laser-light 1
20, 1, // barcode scanner 1
21, 0, // ceramic centering unit 1
22, 0, // optional stopper 1
1 Nachrüstanleitung SOKO Vario Grid Pepperl&Fuchs (00166280-01) SOKO
Ausgabe 06/2006
14
23, 3, // type vacuum tooling = VARIO GRID 1
24, 0, // no verification of clamping with motor 1
41, 0, // left side fixed, width adjustment 1
43, 0, // fixed rails pitch (actual) 1
44, 0, // fixed rails pitch (target) 1
48, 100, // [%] force stepping motor width adj. 1
49, -953, // [um] offset width adjustment 1
50, 198, // [um] offset fixed rail 1
47, 1, // position fixed rail ok 1
60, 1399, // [um] calibration position 1, width adj. 1
61, 21950, // [um] calibration position 2, width adj. 1
62, 330, // [um] cavity driver, input, width adj. 1
63, -362, // corr. a0, sensor width adj., input 1
64, -1164, // corr. a1, sensor width adj., input 1
65, 297, // corr. a2, sensor width adj., input 1
66, 241, // [um] cavity driver, output, width adj. 1
67, -487, // corr. a0, sensor width adj., output 1
68, -429, // corr. a1, sensor width adj., output 1
69, 135 // corr. a2, sensor width adj., output 1
70, 285, // [um] cavity driver, middle, width adj. 1
71, -229, // corr. a0, sensor width adj., middle 1
72, -2204, // corr. a1, sensor width adj., middle 1
73, 573, // corr. a2, sensor width adj., middle 1
80, 60, // [mm/s] velocity stopper 1
81, 350, // [mm/s] velocity sensor stopper 1
82, 25, // [0.1m/s
2
] deceleration stopper 1
83, 600, // [ms] drive-up time stopper 1
84, 60, // [mm/s] velocity stopper LBO 1
85, 300, // [mm/s] velocity sensor LBO 1
86, 25, // [0.1m/s
2
] deceleration stopper LBO 1
87, 600, // [ms] drive-up time stopper LBO 1
90, 1000, // [ms] time after moving up pins 1
91, 100, // [ms] time after moving down pins 1
1
1
1
1
1
1
1
SOKO 1 Nachrüstanleitung SOKO Vario Grid Pepperl&Fuchs (00166280-01)
Ausgabe 06/2006
15
1.8 Ablauf Transport-Firmware
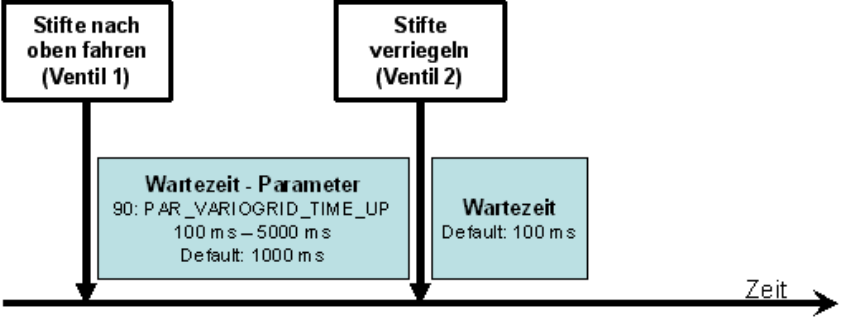
Hochfahren 1
Nach dem Einfahren der Leiterplatte in den Bestückbereich wird der Hubtisch nach oben gefah-
ren. Anschließend werden die Stifte hochgefahren und nach einer parametrierbaren Zeit verrie-
gelt. Die Wartezeit muss der Zeit, die unter anderem von dem verwendeten Druck abhängt,
angepasst werden und ist daher parametrierbar.
Der Ablauf im Einzelnen: 1
1
1. Leiterplatte fährt in den Bestückbereich 1
2. Hubtisch wird hoch gefahren und Leiterplatte geklemmt 1
3. Stifte werden hoch gefahren (Ventil 1) 1
4. Stifte werden verriegelt (Ventil 2) 1
1
Abb. 1.10 - 1 Zeitablauf beim Aktivieren des Vario Grid
1