00195439-05-SG_D-Serie_FSE-DE.pdf - 第249页
14 SITEST 14.3.5 LP-Mapping 14.3 Grundsätzl iche Erläuterung aller Kalibrie rs chritte Student Guide SIPLACE D-Serie (FSE) 249 ► Das Portal wird so verfahren, dass die LP-Kamera über d er LP-Re ferenz-Ecke steht. Die Bil…
14 SITEST
14.3 Grundsätzliche Erläuterung aller Kalibrierschritte 14.3.3 Pipettenwechsler (C&P-Kopf)
248 Student Guide SIPLACE D-Serie (FSE)
▪ das Kalibrierteil wird mit der Pipette unter 270° abgeholt, optisch zentriert und bestückt. Mit der LP-
Kamera wird anschließend die exakte Position ermittelt (in µm).
Dieser Ablauf wird ein zweites Mal wiederholt. Aus den 8 Bestückpositionen wird der Mittelwert ermittelt.
Die Abweichung zur Soll-Bestückposition wird als Segment-Offset unten (II) eingetragen.
14.3.3
14.3.3 Pipettenwechsler (C&P-Kopf)
Pipettenwechsler (C&P-Kopf)
▪ Jedes Pipettenmagazin besitzt eine Passmarke (Bohrung), die zu Beginn des Kalibrierablaufs an
-
gefahren und erkannt werden.
▪ optional kann nun die Abholhöhe des Pipettenwechslers kalibriert werden.
▪ optional kann nun die Abwurfposition des Pipettenwechslers kalibriert werden. Diese Position wird
im Betrieb beim Abwerfen defekter Pipetten angefahren.
14.3.4
14.3.4 Kalibrieren und Teachen von Positionen
Kalibrieren und Teachen von Positionen
Das Teach-Menü ist eine neue Funktion zur Kalibrierung der Positionen. Auf diese Weise kann die kor
-
rekte Position vor dem Kalibrieren geteacht werden.
14.3.4.1
14.3.4.1 Transportwangen
Transportwangen
Für das neue modulare Transportsystem ist diese Kalibrierfunktion notwendig.
Beim modularen Transport sind alle Transportwangen einstellbar. Zur Einstellung der Transportwangen
wird ein Schrittmotor eingesetzt, der über einen Zahnriemen die Stelleinheit antreibt. Die Position der
Transportwangen wird über einen BERO erkannt, daher gibt es nun für jede Transportwange einen
Schaltpunkt. Mit der Kalibrierung werden die Schaltpunkte für den gesamten Verfahrbereich der Brei
-
tenverstellung optimiert. Die Kalibrierung ist notwendig, um sicherzustellen, dass alle zwei Stellantriebe
die Transportwangen parallel verschieben.
Automatischer Ablauf (Transport Mapping):
▪ Der Stellantrieb wird initialisiert und bewegt die Transportwange zur rechten (Endschalter)
▪ Der Stellantrieb erkennt die feste(n) Transportwange(n) (zwei beim Doppeltransport) und verfährt
die einstellbare(n) Transportwange(n) in die Standardposition von 55 mm und vermisst die einge
-
stellte Position sehr genau.
▪ Der Stellantrieb verfährt die Transportwange(n) schrittweise (10 mm Schritte) und bestimmt den Off
-
set der Schaltpunkte der BEROs in den zwei Stellantrieben für die verschiedenen Transportwangen
-
positionen.
▪ Diese Kalibrierung erfolgt von links nach rechts und zurück.
▪ Die Ergebnisse werden als Korrekturwerte auf der TSP 301 (TSP 201) gespeichert und beim Ein
-
stellen und Messen der Transportbreite berücksichtigt.
14.3.4.2
14.3.4.2 Transportbreite kalibrieren
Transportbreite kalibrieren
Der Offset der Transportbreite kann mit einer beliebig breiten LP bestimmt werden. Diese Breite muss
vom Bediener eingegeben werden. Damit wird sichergestellt, dass bei verschiedenen Transportbreiten
eine def. Toleranz (Offset) zwischen den Transportwangen besteht und ein Verklemmen der Leiterplatte
verhindert wird.
14.3.4.3
14.3.4.3 LP-Referenz-Ecke
LP-Referenz-Ecke
► Wählen Sie die Transportspur aus.
► Wählen Sie LP-Referenz-Ecke rechts oder links - nur bei Doppeltransport.
VORSICHT
Vor dem Starten der Kalibrierung des Pipettenwechslers sollte die Konfiguration des Pipetten
-
wechslers und der Füllstand überprüft werden.
HINWEIS
Die Kalibrierung muss für Spur 1 und Spur 2 durchgeführt werden.
14 SITEST
14.3.5 LP-Mapping 14.3 Grundsätzliche Erläuterung aller Kalibrierschritte
Student Guide SIPLACE D-Serie (FSE) 249
► Das Portal wird so verfahren, dass die LP-Kamera über der LP-Referenz-Ecke steht. Die Bildschirm
-
anzeige wird zur Überprüfung auf die LP-Kamera umgeschaltet. Teachen Sie das Portal auf die
rechte obere Kante der Leiterplatte, so dass LP-Referenz-Ecke sich mittig im Kamera-Gesichtsfeld
befinden.
► Diese LP-Referenzecke bestimmt die Positionskoordinaten für die LP-
Positionspassmarkensuche der LP in der Maschine.
14.3.4.4
14.3.4.4 Abholposition (Kalibrierung des BE-Tisches)
Abholposition (Kalibrierung des BE-Tisches)
Dieser Kalibrierschritt bestimmt die X- und Y-Positionen für die BE-Tische, je nach Typ Spur 1-72 oder
1-90, bzw. je nach Konfiguration 1-90 (ohne WPC) oder 61-90 (mit WPC). Ein angeschlossener und ein
-
geschalteter WPC wird von der Software automatisch erkannt.
Kalibrierung des BE-Tisches
14.3.5
14.3.5 LP-Mapping
LP-Mapping
Beim LP-Mapping wird die Linearität der X- und Y-Führung der LP-Kamera im Bearbeitungsbereich ge
-
messen. Die LP-Kamera vermisst Passmarken-Kreuze einer hochpräzisen Glasplatte. Diese Mapping
-
platte wurde in einer Messmaschine vermessen, diese Vermessungsdaten werden während des
Mappingvorganges berücksichtigt.
14.3.5.1
14.3.5.1 Vorbereitung Mapping
Vorbereitung Mapping
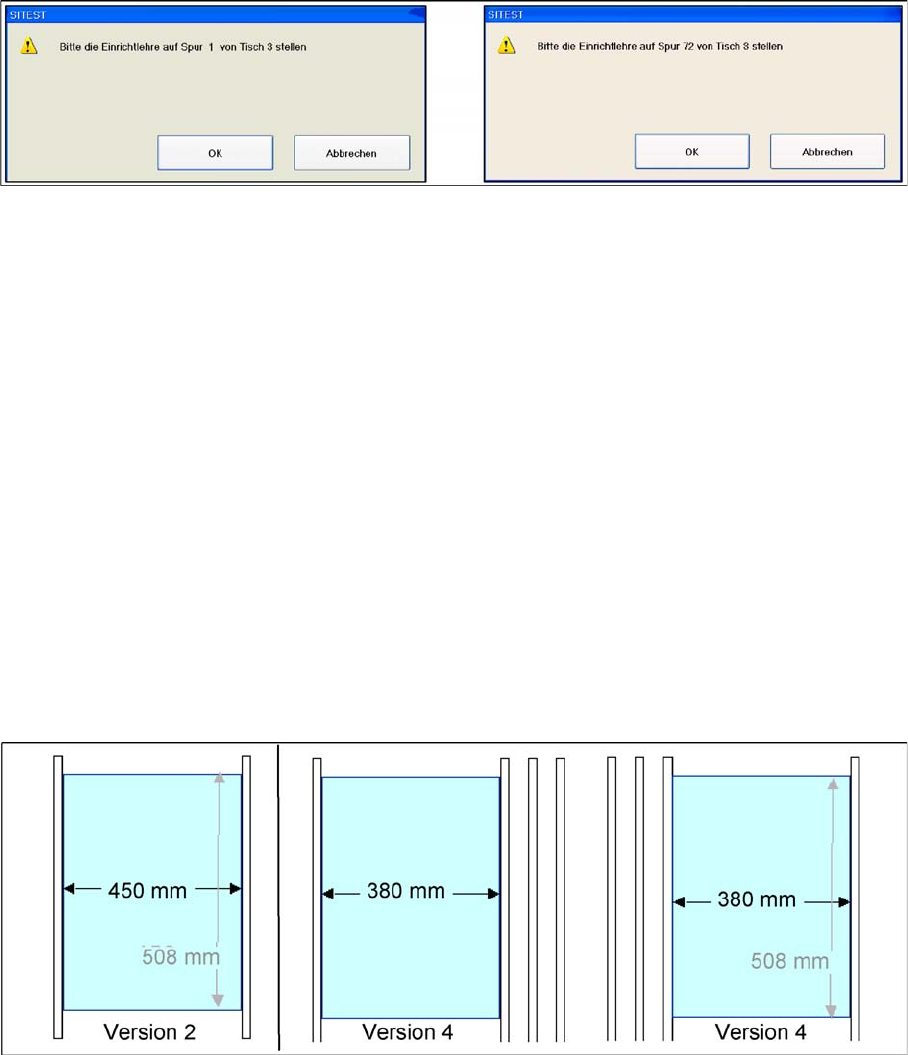
► Beim Einfachtransport wird die Transportbreite auf 508 mm eingestellt, die Mappingplatte
(Version 3) liegt 90° gedreht im Bearbeitungsbereich.
► Beim Doppeltransport bewegt die SITEST-SW die Transportwangen der für Mapping benötigten
Spur auf 450 mm und die nicht benutzte Spur auf 0 mm. Damit lässt sich die Doppeltransportspur
als Einfachtransportspur nutzen. Das Mapping muss deshalb für diese maximale Transportbreite
durchgeführt werden.
► Zum Vorbereiten des LP- und RV-Mappings stellt die SITEST-SW automatisch die Transportwan
-
gen so, dass die Mappingplatte in ihrer jeweiligen Breite in die jeweilige Transportspur passt.
► Der C&P12 muss mit dem Pipettentyp 956 ausgestattet werden.
► Das (die) Kalibrierteil(e) sind in die Kalibrierteiltaschen eingelegt.
Position der Mappingplatte und Transportwangen-Position für Einfach- und Doppeltransport
14 SITEST
14.3 Grundsätzliche Erläuterung aller Kalibrierschritte 14.3.6 Kopf Mapping (C&P-Kopf)
250 Student Guide SIPLACE D-Serie (FSE)
14.3.5.2
14.3.5.2 Ablauf
Ablauf
► Legen Sie die Mappingdiskette bzw. -CD-ROM in den Stationsrechner ein und kopieren Sie die spe
-
zifischen Vermessungsdaten dieser Mappingplatte.
► Legen Sie die Mappingplatte in den Eingabetransport des BB1 oder den Zwischentransport des BB2
ein.
► Es erscheint das Teach-Menü zum Teachen der LP-Referenz-Ecke der Mappingplatte.
► Der Mappingvorgang startet.
► Nun wird die Kamera zur Startposition verfahren (das nächstliegende Kreuz zur festen LP-Ecke).
Diese helle Kreuzmarke wird nun anhand eines synthetischen Abbildes zentriert.
► Diese Koordinaten werden als Sollkoordinaten für die gesamte Glasplatte gesetzt. Für die nächste
Marke werden jeweils 40.000 µm in X-, und /oder Y-Richtung aufaddiert.
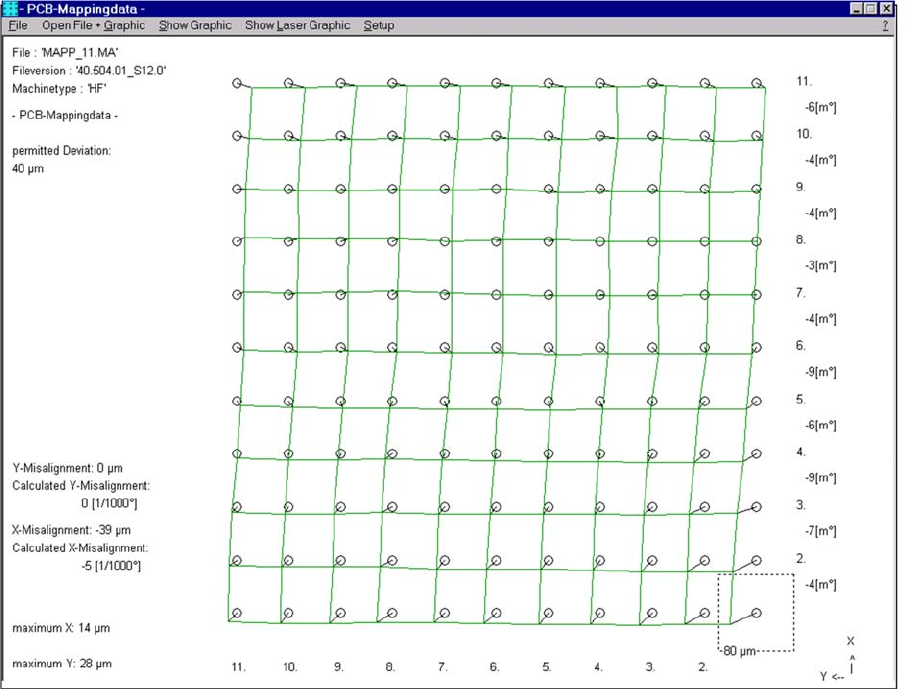
► Die Abweichung dieser Struktur zur Sollposition wird gemessen.
Ergebnisse des Mappingvorgangs
Die Ergebnisse werden in der Datei MAPP_xy.MA (x= Portalnummer, y= Transportspur) gespeichert.
14.3.6
14.3.6 Kopf Mapping (C&P-Kopf)
Kopf Mapping (C&P-Kopf)
Mit dem Kopfmapping wird die Linearität der X-, Y-Führung des C&P-Kopfes gemessen.
Der C&P-Kopf bestückt das Kalibrierteil auf die präzisen Standardpositionen der Mappingplatte. Die LP-
Kamera misst die Bestückgenauigkeit dieser Bestückungen für den gesamten Bearbeitungsbereich.
▪ Nach Fertigstellen des LP-Mappings zentriert das Visionsystem des Bestückkopfes das Kalibrierteil
und es wird auf die Sollkoordinaten der jeweiligen Position auf der Glasplatte bestückt.