00195439-05-SG_D-Serie_FSE-DE.pdf - 第40页
3 Übersicht 3.4 Baugruppen 3.4.8 SIPLACE Vision 40 Student Guide SIPLACE D-Serie (FSE) 3.4.8 3 . 4 . 8 S I P L A C E V is io n SIPLACE Vision Zur Kameraansicht und Details sowie technischen Hintergrund sie he Kapitel &qu…
3 Übersicht
3.4.7 C&P12-Kopf DLM3 3.4 Baugruppen
Student Guide SIPLACE D-Serie (FSE) 39
3.4.7.2
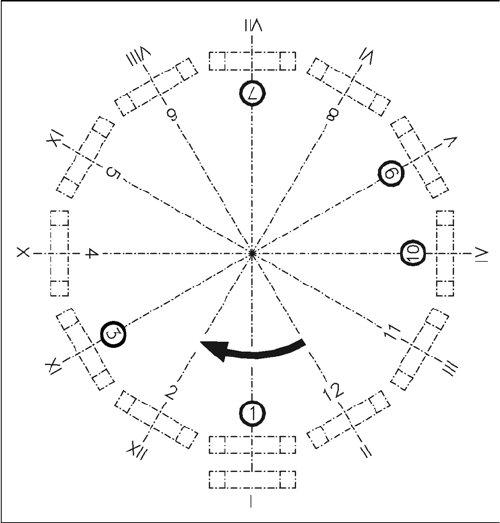
3.4.7.2 Übersicht der Funktionen der Stern-Stationen 1-12
Übersicht der Funktionen der Stern-Stationen 1 - 12
3.4.7.3
3.4.7.3 Position und Funktion der einzelnen Stern-Stationen
Position und Funktion der einzelnen Stern-Stationen
Stern-Station 1
▪ Abholzyklus
Die Pipette wird abwärts zum Bauelement gefahren. Nachdem mit Hilfe der Ventilpositionierung das
Vakuum aufgebaut wurde, nimmt die Pipette das Bauelement vom Zuführmodul auf.
▪ Bestückzyklus
Die Pipette wird zusammen mit dem Bauelement auf die bereitgestellte Leiterplatte abgesenkt. Die
Ventilpositionierung unterbindet die Vakuumversorgung der Pipette. Ein kurzer Druckluftstoß trennt
Bauelement und Pipette voneinander und das Bauelement kann auf der Leiterplatte plaziert werden.
Stern-Station 3
▪ Abwurfzyklus bei D4/D4i/D3/D2/D2i
(Bei D1/Di wird in Sternstation 1 in den P&P-Abwurfbehälter abgeworfen)
Die Ventilpositionierung unterbindet die Vakuumversorgung der Pipette. Defekte Bauelemente wer
-
den mit einem kurzen Druckluftstoß von der Pipette gelöst und abgeworfen.
Stern-Station 7
▪ Das Bauelement wird optisch zentriert.
Stern-Station 9
▪ Abholzyklus
Die Pipette wird zur Position "Abholen" gedreht.
▪ Bestückzyklus
Das Bauelement wird mit Hilfe der DP-Achse in den korrekten Bestückwinkel gedreht.
Zwischen Stern-Station 11 und 12
▪ "Anwesenheit" und "Höhe" des Bauelementes an der Pipette wird durch BE-Sensor (Option) geprüft.
Übersicht der Funktionen der Stern-Stationen 1 – 12
Stern-Station 1: Abholen, Bestücken
Stern-Station 2: keine Funktion
Stern-Station 3: Abwerfen des Bauelements
Stern-Station 4 - 6: keine Funktion
Stern-Station 7: optische Zentrierung des Bauelementes
Stern-Station 8: keine Funktion
Stern-Station 9: Drehen des Bauelementes
Stern-Station 10: Serviceposition für Pinolen und Pipet
-
ten
Stern-Stationen 11 und 12: keine Funktion (optional Bau
-
element-Sensor)
I - XII: Segment-Nummerierung
3 Übersicht
3.4 Baugruppen 3.4.8 SIPLACE Vision
40 Student Guide SIPLACE D-Serie (FSE)
3.4.8
3.4.8 SIPLACE Vision
SIPLACE Vision
Zur Kameraansicht und Details sowie technischen Hintergrund siehe Kapitel "Kommunikation und Steu
-
erung".
Sehen Sie dazu auch...
16.6 SIPLACE Vision - Sensorübersicht [ ➙ 278]
3.4.8.1
3.4.8.1 SIPLACE Vision - Sensorübersicht
SIPLACE Vision - Sensorübersicht
Mit dem digitalen SIPLACE-Vision wurde ein weiterer Schritt geschaffen den Kundenanforderungen
nach Schnelligkeit, Flexibilität und mehr Robustheit gerecht zu werden.
Vorteile des digitalen Visionsystems:
▪ Robuste und schnelle Rechenalgorithmen
▪ Flexible Messabläufe
▪ Intuitiv bedienbare grafische Oberfläche
▪ Geometrische Beschreibung von Bauelementen an der Maschine möglich
▪ Neueste Hardware der digitalen Kamerasysteme
▪ Homogene Ausleuchtung des Kameragesichtsfeldes und Bauelemente
Jeder C&P-Kopf hat eine eigene digitale Bauelemente-Kamera.
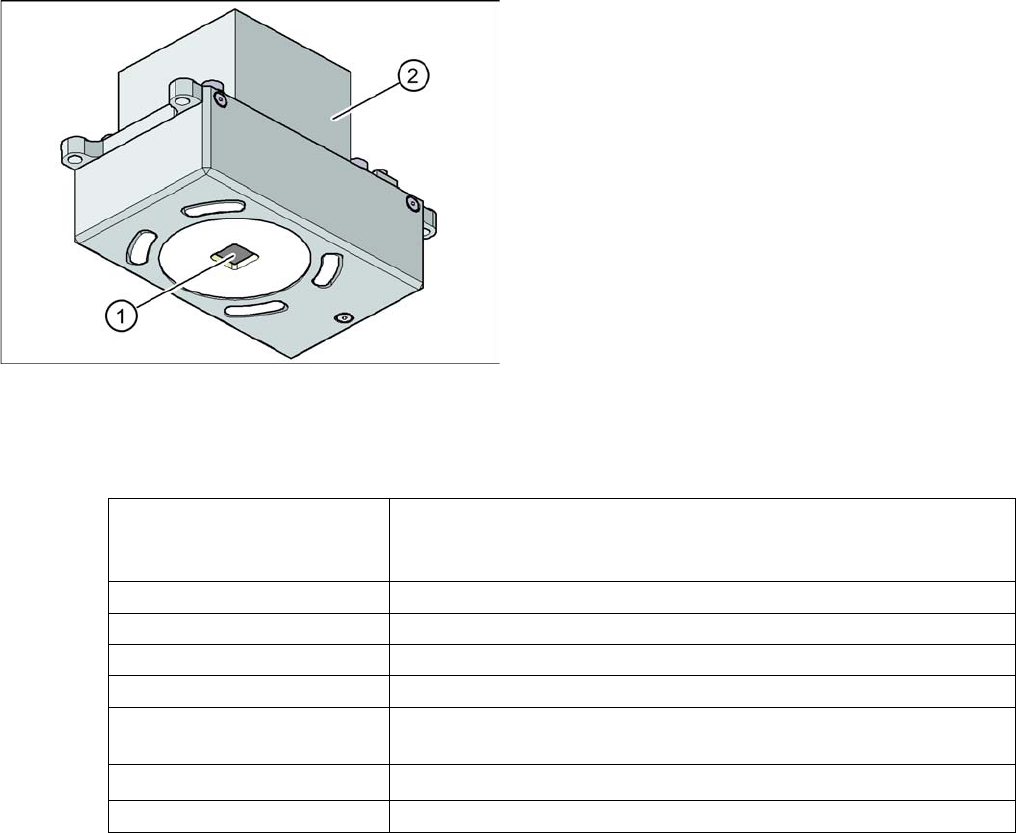
Digitale LP-Kamera (Typ 34)
Technische Daten
Technische Daten Kamera-Typ 34
LP-Kamera unter dem Portal (X-Achse)
Legende
1. LP-Kameraoptik und Beleuchtung
2. Kameraverstärker
LP-Passmarken Bis zu 3 (Einzelschaltungen und Mehrfachnutzen),
bis zu 6 bei der Option "Lange LP" (optionale Marken werden von der
Optimierung ausgegeben).
Lokale Passmarken Bis zu 2 pro LP (können verschiedenen Typs sein)
Bibliothekspeicher Bis zu 255 Passmarkentypen pro Einzelschaltung
Bildverarbeitung Kantendetektionsmethode (Singular Feature) auf Basis der Grauwerte
Beleuchtungsart Auflicht (3 frei programmierbare Ebenen)
Erkennungszeit pro Marke/
Schlechtmarke
20 ms - 200 ms
Gesichtsfeld
5,78 x 5,78 mm
2
Abstand der Fokusebene 28 mm
3 Übersicht
3.4.8 SIPLACE Vision 3.4 Baugruppen
Student Guide SIPLACE D-Serie (FSE) 41
Passmarken-Kriterien
Inkpunkt-Kriterien
2 Marken ermitteln X-/Y-Position, Verdrehwinkel mittlerer LP-Verzug
3 Marken ermitteln zusätzlich: Scherung, Verzug separat in X- und Y-Richtung
Markenformen Synthetische Marken: Kreis, Kreuz, Quadrat, Rechteck, Raute,
kreisförmige, quadratische und rechteckige Konturen, Doppelkreuz
Muster: beliebig
Markenoberfläche
Kupfer Ohne Oxidation und Lötstopplack
Zinn Wölbung 1/10 der Strukturbreite, jeweils guter Kontrast zur Umgebung
Maße synthetischer Marken
Min. X/ Y-Größe für Kreis und Rechteck: 0,25 mm
Min. X/ Y-Größe für Kreisring und Rechteckrahmen: 0,3 mm
Min. X/ Y-Größe für Kreuz: 0,3 mm
Min. X/ Y-Größe für Doppelkreuz: 0,5 mm
Min. X/ Y-Größe für Raute: 0,35 mm
Min. Rahmenbreite für Kreisring und Rechteckrahmen: 0,1 mm
Min. Balkenbreite/Balkenabstand für Kreuz, Doppelkreuz: 0,1 mm
Max. X/ Y-Größe für alle Markenformen: 3 mm
Max. Balkenbreite für Kreuz, Doppelkreuz: 1,5 mm
Min. Toleranzen generell: 2% vom Nennmaß
Max. Toleranzen generell: 20% vom Nennmaß
Max. Winkeltoleranz: 2° für synthetische Marken
5° für Mustermarken
Maße von Mustern
Min. Größe 0,5 mm
Max. Größe 3 mm
Markenumgebung Freiraum um die Passmarke nicht notwendig, wenn sich innerhalb des
Suchfeldes keine ähnliche Markenstruktur befindet.
Methoden ▪ Synthetisches Markenerkennungsverfahren
▪ Mittlerer Grauwert
▪ Histogramm-Methode
▪ Template Matching
Größe der Markenformen bzw. Strukturen
Synthetische Marken Maße synthetischer Marken siehe "3.4.8.1.1.2 Passmarken-Kriterien"
[➙41].
Andere Verfahren Min. 0,3 mm
Max. 3 mm
Abdeckmaterial Gut deckend
Erkennungszeit Je nach Methode 20 ms - 0,2 s