00195439-05-SG_D-Serie_FSE-DE.pdf - 第69页
4 Kommunikation und Steuerung 4.3.8 Kommunikation SIPLACE Vision 4.3 CAN-Bus Student Guide SIPLACE D-Serie (FSE) 69 * Nur bei X-Maschine mit C&P20-Kopf-Ausrüstung 4.3.8 4 . 3 . 8 K o m m u n ik a t io n S I P L A C E…
4 Kommunikation und Steuerung
4.3 CAN-Bus 4.3.7 Dateinamen-Codes für den Download
68 Student Guide SIPLACE D-Serie (FSE)
K05xxxxx.he
x
C&P12/6 auf HF-Maschinen mit 8 Bit CAN-Controller
K06xxxxx.he
x
C&P12/6 auf HF/X-Maschinen mit 16 Bit CAN-Controller
K07xxxxx.he
x
C&P12/6 + TwinHead D1/D1i/D2/D2i/D4/D4i
L0300101.he
x
L: digitales Druckregelventil
L0200101.he
x
02 Druckregelventil mit analogem Controller
L0300101.he
x
03 Druckregelventil mit digitalem Controller
M0200200.b
hx
M bedeutet CAN-Controller am MTC (02 MTC2)
P0100208.bh
x
P bedeutet Achscontroller Z-Achse TWIN
R0100208.bh
x
R bedeutet Achscontroller D-Achse TWIN
S0100208.bh
x
S bedeutet Stern-Achsen C&P12/6
T0100302.he
x
T bedeutet Transportsteuerung (auf die HW-Versionen achten)
T01xxxxx.he
x
Transport HS 50 mit TSP 100-Steuerung
T02xxxxx.he
x
Transport HS 50 mit TSP 200-Steuerung
T03xxxxx.he
x
Transportsteuerung S25HM/F5HM
T04xxxxx.he
x
Transportsteuerung S27/D1/D1i/D2/D2i mit TSP 201
T05xxxxx.he
x
Transportsteuerung HS 60/D4/D4i mit TSP301
T06xxxxx.he
x
Transportsteuerung X-Maschinen/D3 mit TSP 301
U…… U …. 2ter Download-Level erzeugt einen 2. Namensbuchstaben
UA100208.b
hx
A .1.02.08 UA bedeutet X-Feeder Controller SW
UB0100208.
bhx
B .1.02.09 UB bedeutet X-Adapter für spezielle Förderer auf X-Tischen
V0500208.bh
x
V bedeutet Visioncontroller Sub-Platinen der Köpfe und stat. Kameras
V01… V04 ... integriert in K01 bis K04xxxxx.bhx (8 Bit CAN-Controller)
V0500208.bh
x
Vision CAN-Controller für Kopf- und stationäre Kameras seit HF-
Maschinen
W0100208.b
hx
* W bedeutet Z-Achse C&P20
Dateibe
-
zeichnung
sonstige Be
-
schreibung
HW- Komponente durch Buchstaben
nähere Erläuterung zur HW-Version
4 Kommunikation und Steuerung
4.3.8 Kommunikation SIPLACE Vision 4.3 CAN-Bus
Student Guide SIPLACE D-Serie (FSE) 69
*
Nur bei X-Maschine mit C&P20-Kopf-Ausrüstung
4.3.8
4.3.8 Kommunikation SIPLACE Vision
Kommunikation SIPLACE Vision
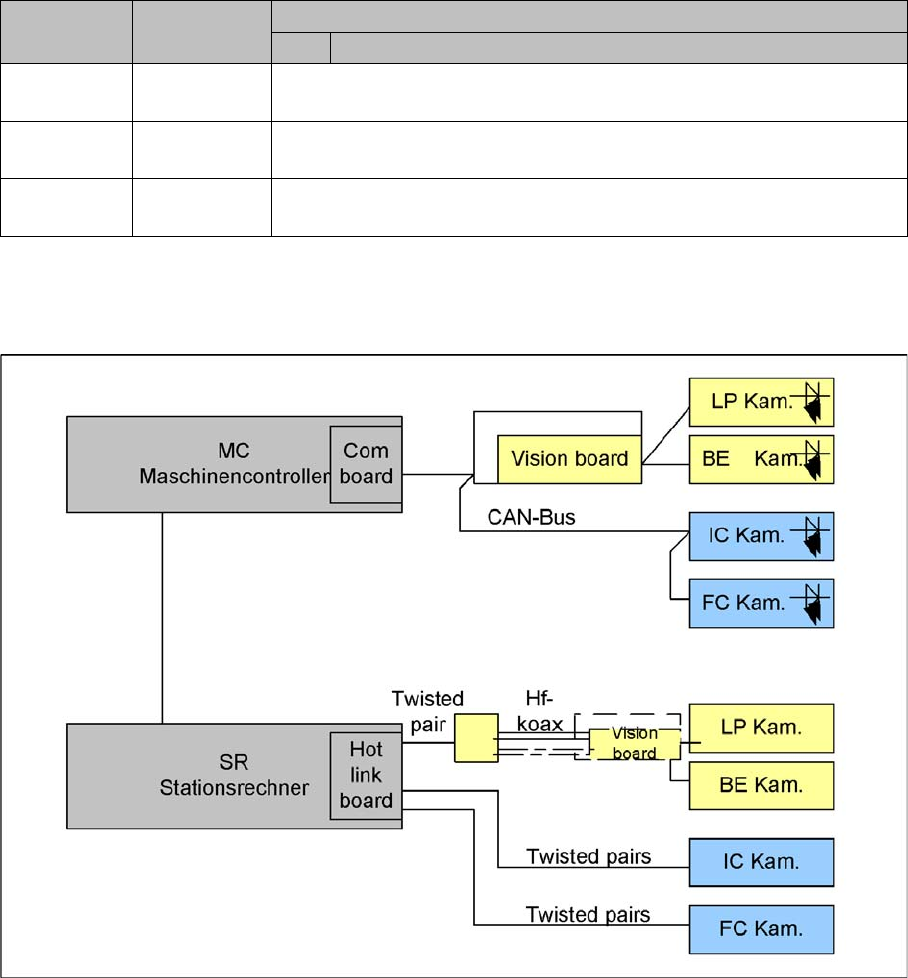
Überblick SIPLACE Vision
Die Kommunikation zwischen den einzelnen Rechnern erfolgt über LAN-Kabel, wobei der MC das Kom
-
mando zur Bildaufnahme an den Visionrechner sendet und das Resultat der Messung empfängt. Wei
-
terhin schickt der MC die Beleuchtungswerte für die entsprechenden GFs. Die aufgenommenen Bilder
werden digital über eine Hotlink-Verbindung zur Vision-Task des Stationsrechners geschickt und aus
-
gewertet. Das Ergebnis der Auswertung (X/Y-Winkel-Koordinaten, Gut/Schlecht-Zustand) wird zum MC
gesendet.
X0100208.bh
x
X bedeutet X-Achsen
Y0100208.bh
x
Y bedeutet Y-Achsen
Z0100208.bh
x
Z bedeutet Z-Achsen C&P12/6
Dateibe
-
zeichnung
sonstige Be
-
schreibung
HW- Komponente durch Buchstaben
nähere Erläuterung zur HW-Version
4 Kommunikation und Steuerung
4.3 CAN-Bus 4.3.9 CAN-Bus-Prozessorboard auf dem Portal-Kopf-Verteiler
70 Student Guide SIPLACE D-Serie (FSE)
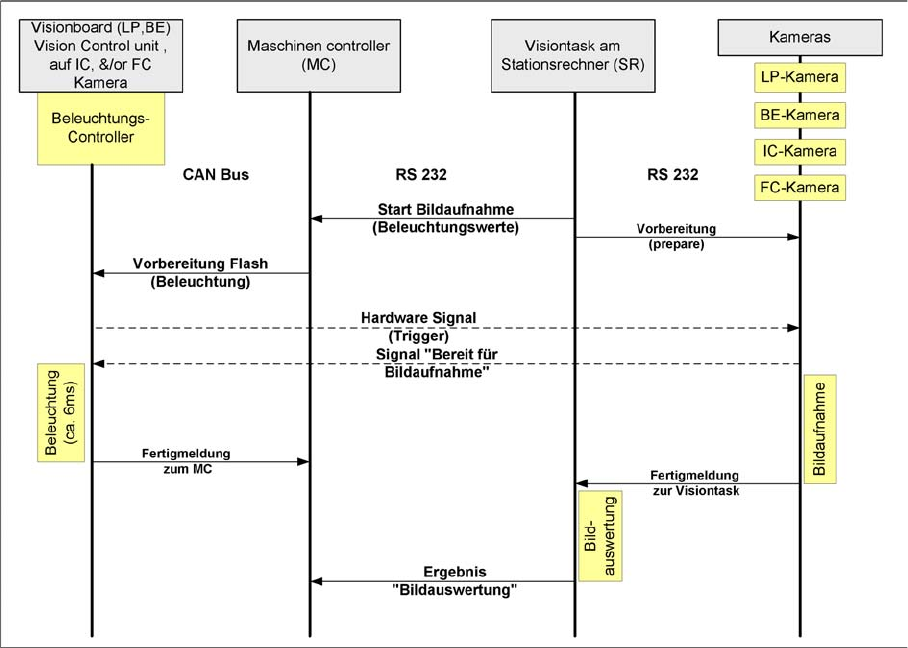
4.3.8.1
4.3.8.1 Kommunikation während einer Bildaufnahme
Kommunikation während einer Bildaufnahme
Zeitlicher Ablauf von Oben nach Unten der Kommunikation Bildaufnahme
Die wichtigste Kommunikation zwischen dem Visionsystem und dem Maschinencontroller ist die
Übertragung der Beleuchtungswerte. Diese in der GF gespeicherten Werte werden über den CAN-Bus
an die betreffende Kamera geschickt. Soll die Kamera das Bild aufnehmen, wird sie durch ein Trigger
-
signal aktiviert. Ab diesem Moment leuchten die jeweiligen LED-Reihen der verschiedenen Beleuch
-
tungsstufen, abhängig vom Beleuchtungswert 0-255. Dieser kann die Werte 0 = dunkel bis 255 = hell
annehmen. Die Dauer der Beleuchtungszeit wird ebenfalls über einen Wert 0 bis 255 bestimmt.
Die maximale Dauer der Beleuchtung ist beschränkt auf 6 ms.
4.3.9
4.3.9 CAN-Bus-Prozessorboard auf dem Portal-Kopf-Verteiler
CAN-Bus-Prozessorboard auf dem Portal-Kopf-Verteiler
Das CAN-Bus-Prozessorboard TQM 167LC ist auf der Kopfplatine aufgesteckt. Das Prozessorboard
wird an verschiedenen Stellen in der Maschine eingesetzt. Befindet sich das Prozessorboard auf der
Kopfplatine, sorgt die Firmware auf dem Prozessorboard für die Steuerung der kopfspezifischen Aktoren
und Sensoren, egal welcher Kopftyp installiert ist.
4.3.9.1
4.3.9.1 CAN-Bus-gesteuerte Funktionen am C&P12-Kopf
CAN-Bus-gesteuerte Funktionen am C&P12-Kopf
Die folgende Übersicht zeigt verschiedene Kopffunktionen, die über das CAN-System gesteuert werden.
Der CAN-Bus steuert damit die Aktoren und Sensoren des C&P-Kopfes.