00195439-05-SG_D-Serie_FSE-DE.pdf - 第71页
4 Kommunikation und Steuerung 4.3.10 CAN-Bus-Kommunikation mit der Achsansteuerung 4.3 CAN-Bus Student Guide SIPLACE D-Serie (FSE) 71 CAN-Bus gesteuerte Funkti on am C&P-Kopf 4.3.10 4 . 3 . 1 0 C A N - B u s - K o m …
4 Kommunikation und Steuerung
4.3 CAN-Bus 4.3.9 CAN-Bus-Prozessorboard auf dem Portal-Kopf-Verteiler
70 Student Guide SIPLACE D-Serie (FSE)
4.3.8.1
4.3.8.1 Kommunikation während einer Bildaufnahme
Kommunikation während einer Bildaufnahme
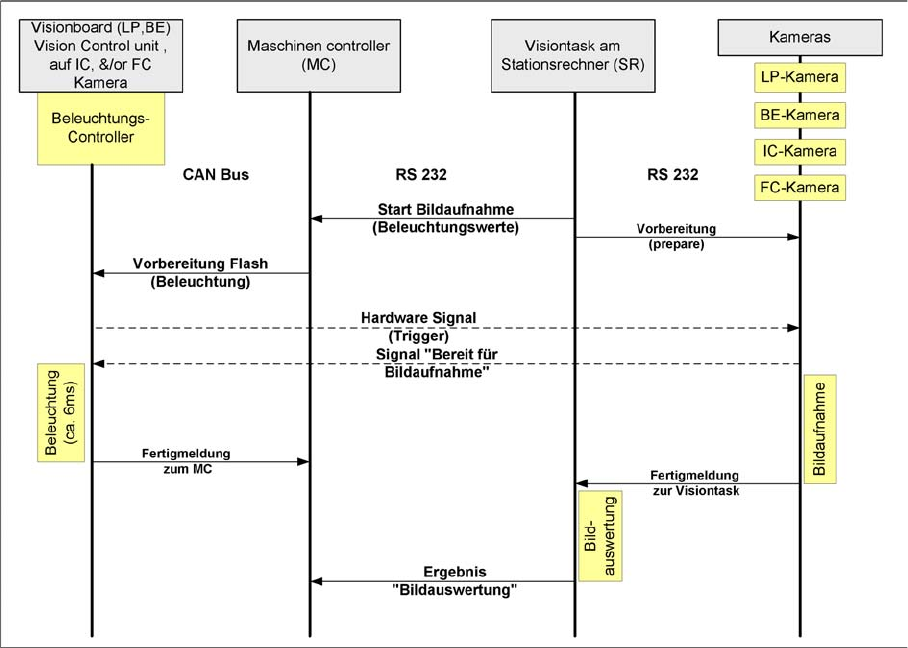
Zeitlicher Ablauf von Oben nach Unten der Kommunikation Bildaufnahme
Die wichtigste Kommunikation zwischen dem Visionsystem und dem Maschinencontroller ist die
Übertragung der Beleuchtungswerte. Diese in der GF gespeicherten Werte werden über den CAN-Bus
an die betreffende Kamera geschickt. Soll die Kamera das Bild aufnehmen, wird sie durch ein Trigger
-
signal aktiviert. Ab diesem Moment leuchten die jeweiligen LED-Reihen der verschiedenen Beleuch
-
tungsstufen, abhängig vom Beleuchtungswert 0-255. Dieser kann die Werte 0 = dunkel bis 255 = hell
annehmen. Die Dauer der Beleuchtungszeit wird ebenfalls über einen Wert 0 bis 255 bestimmt.
Die maximale Dauer der Beleuchtung ist beschränkt auf 6 ms.
4.3.9
4.3.9 CAN-Bus-Prozessorboard auf dem Portal-Kopf-Verteiler
CAN-Bus-Prozessorboard auf dem Portal-Kopf-Verteiler
Das CAN-Bus-Prozessorboard TQM 167LC ist auf der Kopfplatine aufgesteckt. Das Prozessorboard
wird an verschiedenen Stellen in der Maschine eingesetzt. Befindet sich das Prozessorboard auf der
Kopfplatine, sorgt die Firmware auf dem Prozessorboard für die Steuerung der kopfspezifischen Aktoren
und Sensoren, egal welcher Kopftyp installiert ist.
4.3.9.1
4.3.9.1 CAN-Bus-gesteuerte Funktionen am C&P12-Kopf
CAN-Bus-gesteuerte Funktionen am C&P12-Kopf
Die folgende Übersicht zeigt verschiedene Kopffunktionen, die über das CAN-System gesteuert werden.
Der CAN-Bus steuert damit die Aktoren und Sensoren des C&P-Kopfes.
4 Kommunikation und Steuerung
4.3.10 CAN-Bus-Kommunikation mit der Achsansteuerung 4.3 CAN-Bus
Student Guide SIPLACE D-Serie (FSE) 71
CAN-Bus gesteuerte Funktion am C&P-Kopf
4.3.10
4.3.10 CAN-Bus-Kommunikation mit der Achsansteuerung
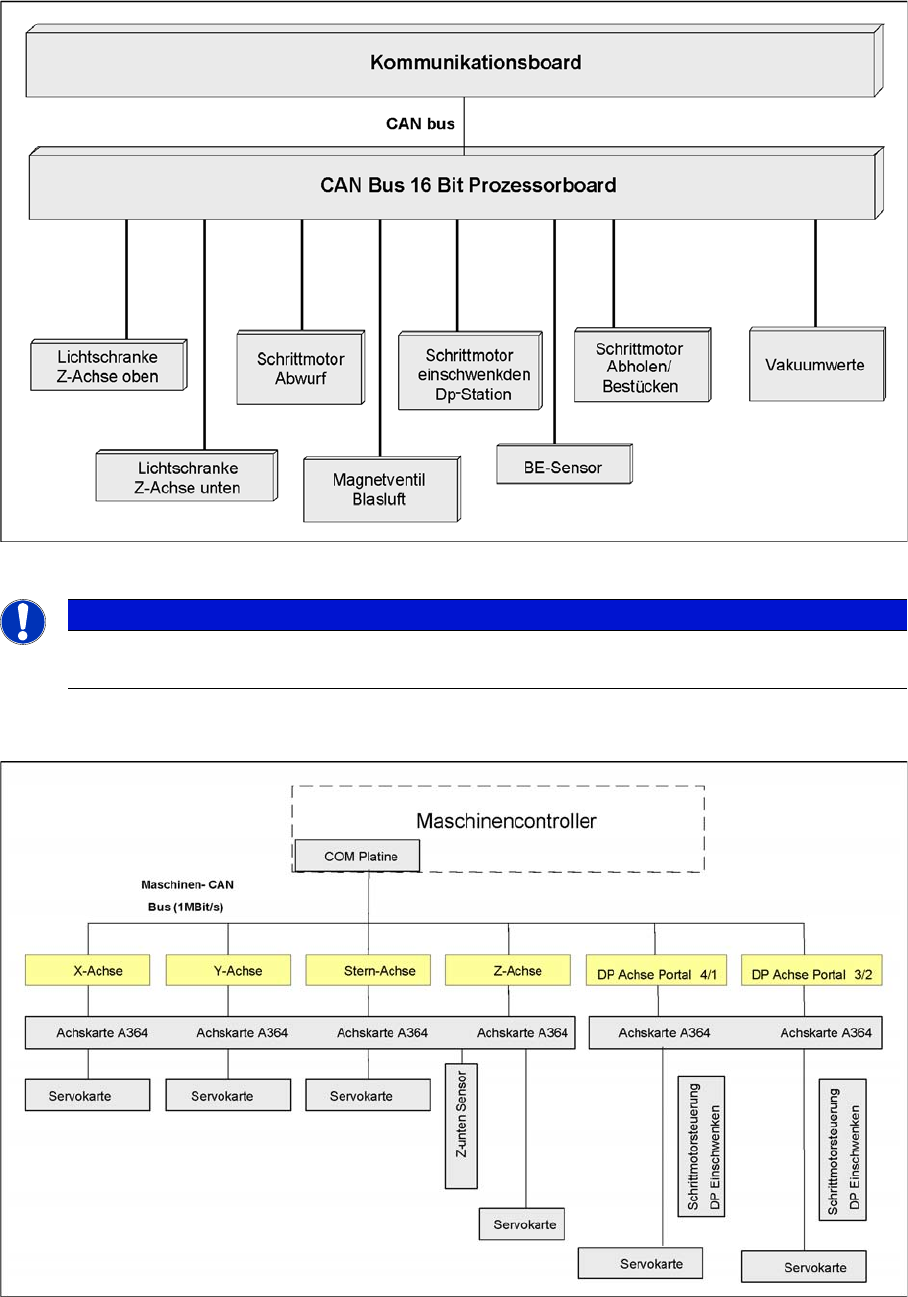
CAN-Bus-Kommunikation mit der Achsansteuerung
Übersicht Achsansteuerung
In früheren SIPLACE-Maschinen erfolgte die Kommunikation und der Datenfluss zwischen Achs- und
Maschinensteuerung mittels SMP-Bus. Seit der HF-Generation wird der SMP-Bus nicht mehr mit dem
Achssystem verwendet.
HINWEIS
Über die 7-Segment-Anzeige wird der Status des 16-Bit-Prozessorboards angezeigt.
Normaler Betriebszustand: "." blinkt. (Beschreibung siehe Abschnitt C&P12).
4 Kommunikation und Steuerung
4.3 CAN-Bus 4.3.10 CAN-Bus-Kommunikation mit der Achsansteuerung
72 Student Guide SIPLACE D-Serie (FSE)
Die Kommunikation zwischen den Achssteuerungen erfolgt jetzt über den CAN-Bus. Alle Informationen,
die zwischen diesen Modulen ausgetauscht werden, werden durch den CAN-Bus übertragen (z. B.
Achsparameter, Zielposition, Endesignal, ...). Dies bedeutet natürlich, dass die Anzahl einzelner Tele
-
gramme wesentlich zunimmt, verglichen mit der Menge an Daten der älteren Maschinengeneration.
Die Achsansteuerungen werden aufgeteilt in:
▪ Achsansteuerung I und II für Portal- und Hauptachsen und
▪ Achsansteuerung III für "verbleibende Kopfachsen".
Die Achsansteuerungen I und II kommunizieren direkt miteinander über Interrupt-Leitungen für die An
-
ticrash-Überwachung. Kommuniziert werden dabei die beiden Y-Portalachspositionen und die
Achszustände.