00195439-05-SG_D-Serie_FSE-DE.pdf - 第99页
6 Referenzlauf 6.1.3 Achsreferenzlauf 6.1 Referenzlauf (D/Di-Serie) Student Guide SIPLACE D-Serie (FSE) 99 – Die Sternachse l ädt die Nullpunktkorrektur. – Die Sternachse positionier t auf den Zählerstand 0. Damit steh t…
6 Referenzlauf
6.1 Referenzlauf (D/Di-Serie) 6.1.3 Achsreferenzlauf
98 Student Guide SIPLACE D-Serie (FSE)
► Start-Taste betätigen
Diese schaltet auch die Steuerspannungen ein.
► Vorbereiten des Sternachsreferenzlauf
Dazu werden folgende Schritte ausgeführt:
– Aufwärtspositionieren der Z-Achse auf Anschlag oben.
– Positionieren abwärts auf Z-Position (30 Digit) mit reduzierter Kraft für eine freie Sternbewegung.
► Sternachsreferenzlauf
Nacheinander werden folgende Schritte ausgeführt:
– Die Sternachse führt in der 1. Referenzfahrt eine Kommutierungspunktsuche für das 3-Phasensys
-
tem des Antriebs durch.
– Die Sternachse positioniert auf den Achsnullimpuls.
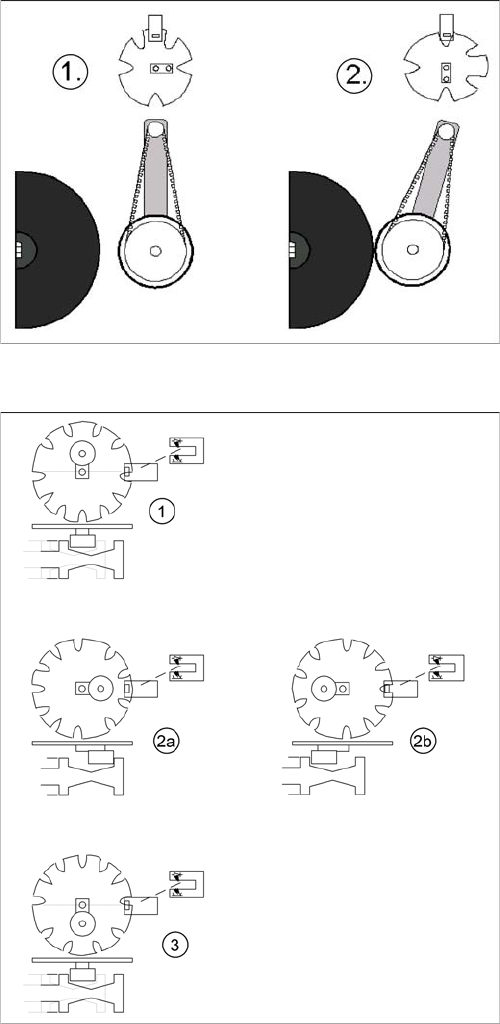
Initialisierung des Schrittmotors an der DP-Station (1)
Legende
1. Homeposition DP-Antrieb mit einem Abstand von ca.
1 mm vom Segment
▪ Die DP-Station hat dadurch ca. 1 mm vom Segment
weg geschwenkt.
Initialisierung des Stellantriebs an Abhol-/Bestück- und
Abwurfposition
Legende
▪ 1. Homeposition, Initialisierungsposition. Verfahren
der Stern-Achse freigeben.
oder
▪ 3. Position entgegengesetzt zur Ausgangsposition.
Verfahren der Stern-Achse freigeben.
▪ Die Ventilstellantriebe haben die Antriebskugellager
so in die Ventilstößel gestellt, dass eine Sterndre
-
hung ohne Störung möglich ist.
6 Referenzlauf
6.1.3 Achsreferenzlauf 6.1 Referenzlauf (D/Di-Serie)
Student Guide SIPLACE D-Serie (FSE) 99
– Die Sternachse lädt die Nullpunktkorrektur.
– Die Sternachse positioniert auf den Zählerstand 0. Damit steht Segment 1 in der Sternabhol- und
Bestückposition.
► Z-Achsreferenzpunktfahrt
Weil die Z-Achse keinen Nullimpuls hat wird der Z-Achsanschlag oben für diese "Nullimpulsposition"
benutzt. Die Nullpunktkorrektur (NPK) wird während eines jeden Referenzlaufes ermittelt.
– Die Z-Achse wieder auf den Anschlag oben und dann auf den Standardwert 5 Digit positioniert.
Anschließend:
– Die Sternachse positioniert auf 6250 Digits (6,25°).
– Die Z-Achse positioniert abwärts auf Anschlag Z-Position übertragen & zurück auf 5 Digit.
– Die Sternachse positioniert auf 6750 Digits (6,75°).
– Die Z-Achse positioniert aufwärts auf Anschlag Z-Position übertragen & zurück auf 5 Digit.
– Die Sternachse positioniert auf -6250 Digits (-6,25°).
– Die Z-Achse positioniert abwärts auf Anschlag Z-Position übertragen & zurück auf 5 Digit.
– Die Sternachse positioniert auf -6750 Digits (-6,75°).
– Die Z-Achse positioniert aufwärts auf Anschlag Z-Position übertragen & zurück auf 5 Digit.
► Aus den 4 Z-Achspositionen wird die Z-Nullpunktkorrektur errechnet, an den Achscontroller
übertragen und bis zum Ausschalten der Maschine benutzt.
– Die Sternachse wird wieder auf die 0-Position (Segment 1 unten) positioniert.
Durch diese automatische NPK wird das Segmentkugellager optimal in die Position für die
Kreisbogenführung gestellt.
► Damit ist der Kopfachsreferenzlauf abgeschlossen.
6.1.3.2
6.1.3.2 Portalachsreferenzlauf
Portalachsreferenzlauf
Der erste Referenzlauf beinhaltet auch die Kommutierungspunktsuche für die 3-Phasenantriebe der
Portalachsen.
Ablauf:
Initialisieren des 3-Phasenantriebsystems und des Positionsmesssystems der Portalachsen:
▪ Kommutierungspunktsuche der X-/Y-Portalachse.
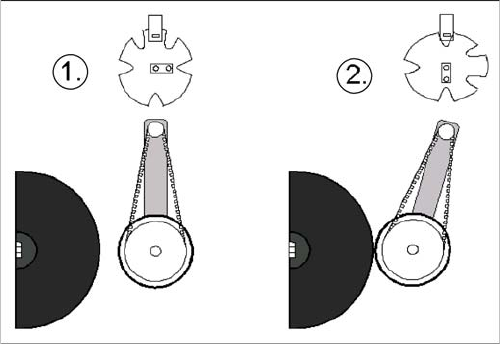
Positionieren der DP-Achse mit Hilfe von Ein- und Aus
-
schwenkfunktionen
Legende
1. Homeposition DP-Antrieb mit einem Abstand von ca.
1 mm vom Segment.
2. DP-Antrieb an Segment angedockt.
► DP-Achsreferenzlauf
– Die DP-Station wird über ein CAN-Bus-Kommando
eingeschwenkt (2).
– Der Achscontroller startet von der 0-Position aus
bis im Inkrementalgeber der Nullimpuls eines Seg
-
mentes erkennbar ist.
► Die DP-Station wird über ein CAN-Bus-Kommando
wieder ausgeschwenkt (1).
6 Referenzlauf
6.1 Referenzlauf (D/Di-Serie) 6.1.3 Achsreferenzlauf
100 Student Guide SIPLACE D-Serie (FSE)
▪ Positionieren auf die Hardwareendanschläge.
Die Y-Portalachsen werden auf die außenliegenden Endanschläge in kleinen Schritten positioniert.
Die Zielposition wird vorgegeben. Falls diese nicht erreicht wird und keine Zählimpulse am Inkre
-
mentalgeber erkennbar sind, hat die Achse den Hardwareendanschlag erreicht.
▪ Bewegungsrichtungsumkehr der Achse und Suche des Nullimpulses auf dem Inkrementalmaßstab.
– Laden der X- bzw. Y-Achsnullpunktkorrektur.
Damit ist der Achsreferenzlauf abgeschlossen das Positionieren aller Achsen für den Bestückbetrieb ist
möglich.
X- und Y-Kommutierungspunktsuche (A364)
Eine Kommutierungspunktsuche für die 3-phasigen AC-Antriebe des Portals startet gleich nachdem der
Referenzlauf der Kopfachsen erfolgreich beendet wurde.
1. Kommutierungspositionssuche beim allerersten Referenzlauf:
Vorbedingung und Funktion:
▪ Achsreferenzlauf an den entsprechenden Bestückköpfen erfolgreich beendet.
▪ 2 Motorphasen werden an die Leistungs-Stromversorgung des Servoverstärkers geschaltet.
▪ Der 3-Phasen-AC-Motor bewegt sich bis zur nächsten passenden magnetischen Position.
▪ 2 andere Motor-Phasen werden auf die Servo-Stromversorgung geschaltet und die Achse bewegt
sich weiter.
▪ Diese Schaltvorgänge wiederholen sich mehrmals.
Der Achsreferenzlauf wird fortgesetzt mit der Referenzpositionssuche für das Positionsmesssystem.
Initialisieren Positionsmesssystem
Statt der Schaltpositionen der BEROs werden jetzt die Hardwareendanschläge der jeweiligen Portala
-
chsen gesucht.
▪ Positionieren mit kleinen Schrittweiten im Modus Stillstandssuche
▪ Zielposition:
– Wird die Zielposition erreicht, so wird ein weiterer Schritt in Richtung Endanschlag programmiert
und positioniert.
– Wird eine Zielposition nicht erreicht, so wird überprüft ob weitere Zählimpulse einlaufen. Falls
dies über eine bestimmte Zeit nicht der Fall ist, so erkennt die Achse den Umkehrpunkt der Por
-
talpositionierung und beginnt die Suche nach dem Nullimpuls.
▪ Die Achse positioniert die Y-Achsen in Richtung Maschinenmitte, die X-Achsen in Richtung Umlen
-
klager der X-Achse.
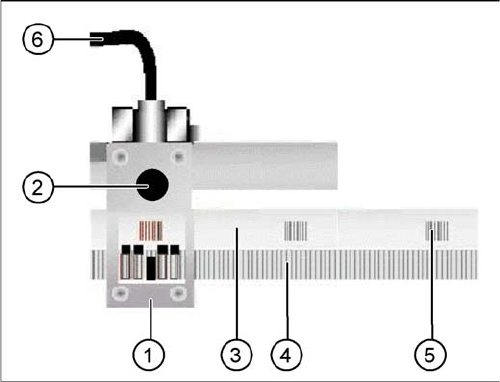
Symbolische Darstellung des Inkrementalgebers mit
Maßstab
Legende
1. Inkrementalgeber
2. Teststecker Spursignale (analog)
3. Inkrementalmaßstab
4. Inkremente auf dem Maßstab (1 µm Auflösung)
5. Nullimpuls
6. Anschlusskabel zum Portalverteiler/Portal-Kopfver
-
teiler