Betriebsanleitung_HF3_14_de.pdf - 第288页
Der Rahmen [ Mittenunterstützung] ▪ [Übersetzung]: Das Übersetzungsverhältnis angeben. Lesen Sie hierzu das Da- tenblatt des Antriebes. ▪ [Stromgrenze]: Einen Stromgrenzwert in [mA] eingeben. Wird der angezeigte Wert übe…
Der Einstellungsdialog [Motor] Mittenunterstützung
In diesem Dialog können Sie die Mittenunterstützung einrichten und deren Refe-
renzierung vornehmen.
HINWEIS
Keine Änderungen möglich?
Für den Zugang zu diesem Dialog sind die Benutzerrechte [Sollwerteingabe] erfor-
derlich. Die Einstellungen können ohne Benutzernamen und Kennwort lediglich
angezeigt werden. Drücken Sie in diesem Fall während die Kennwortabfrage er-
scheint, die Taste [ESC] auf Ihrer Tastatur oder klicken Sie auf die Schaltfläche
[Abbrechen].
Wir beschreiben hier lediglich die Dialoge der Transportspur 1, diese gelten dann
sinngemäß für alle weiteren Transportspuren.
ü Den Einstellungsdialog [Motor] öffnen:
1. Im Eingabedialog [Breitenverstellung] im Rahmen [Mittenunterstützung] die
Schaltfläche
anklicken.
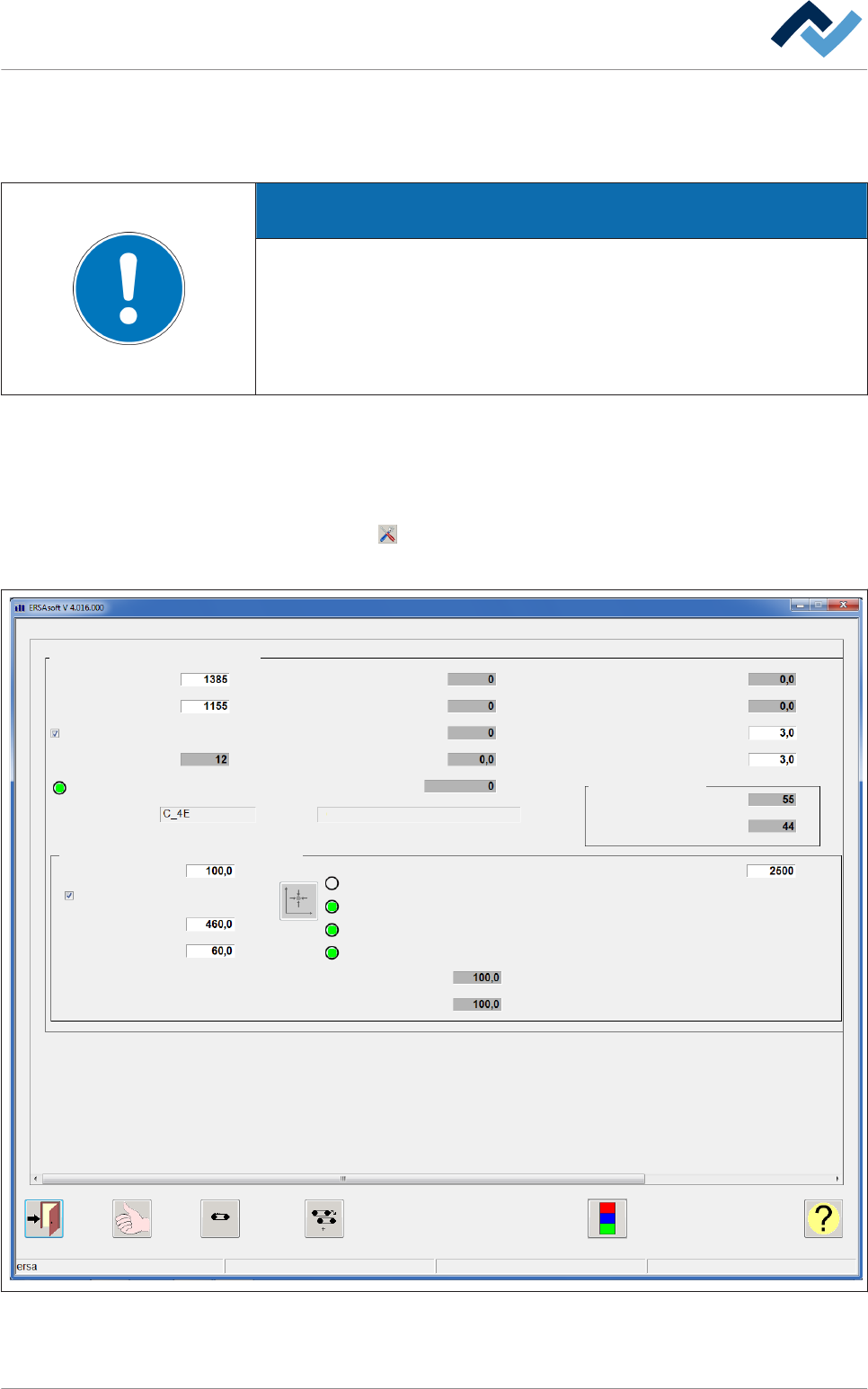
ð Der Einstellungsdialog [Motor] [Mittenunterstützung] erscheint:
Motor
Sollgeschwindigkeit
Einrichten
Mittenunterstützung
Übersetzung
Stromgrenze
Pos. Richtung links
CAN Knoten
Kommunikation OK
Positionierung
Istgeschwindigkeit
Sollgeschwindigkeit
Aktueller Strom
Temperatur
Statusregister
Sollgeschwindigkeit Max.
Sollgeschwindigkeit Min.
Toleranz minus
Toleranz plus
Betriebsdauer
Freigabedauer
Aktuelle Position
Einrichten
Version:
Dauern
U/min
U/minmA
°C
U/min
U/min
mm
in mm
Kein Fehler
Referenzposition
Position maximal
Position minimal
mA
mm
mm
mm
Motor ist referenziert
in mm
in mm
Einstellungen
Absolute Position
h
h
Breitenverstellung
Ref. Richtung neg.
HW-Referenzschalter (grau=frei)
HW-Endschalter pos. (grün=frei)
HW-Endschalter neg. (grün=frei)
Abb. 104: Der Einstellungsdialog [Motor] [Mittenunterstützung]
6.17.15
Funktionsbeschreibung | 6
Ersa GmbH Betriebsanleitung_HF3_14_de | 28.10.2014 287 / 0

Der Rahmen [Mittenunterstützung]
▪ [Übersetzung]: Das Übersetzungsverhältnis angeben. Lesen Sie hierzu das Da-
tenblatt des Antriebes.
▪ [Stromgrenze]: Einen Stromgrenzwert in [mA] eingeben. Wird der angezeigte
Wert überschritten, wird eine Meldung angezeigt.
▪ [Pos. Richtung links]: Die Checkbox aktivieren, wenn die Positionierung bei
linksdrehender Motorachse vorwärts läuft.
▪ [CAN Knoten]: Zeigt die CAN Knotennummer des Antriebes an.
▪ [Kommunikation OK] Zeigt den Status der Kommunikation zwischen Motor und
SPS an. Ist die Kommunikation OK, wird die LED grün dargestellt.
▪ [Version:] Anzeige der Firmwareversion des Motors.
▪ Istgeschwindigkeit]: Zeigt die aktuelle Motordrehzahl in [U/min] an.
▪ [Sollgeschwindigkeit]: Zeigt den eingestellten Wert der Soll-Motordrehzahl an.
▪ [Aktueller Strom]: Zeigt den aktuellen Motorstrom in [mA] an.
▪ [Temperatur]: Zeigt die aktuelle Motortemperatur in [°C] an.
▪ [Statusregister]: Anzeige zu Service- und Diagnosezwecken.
▪ [Fehlercode:]: Anzeige zu Service- und Diagnosezwecken.
▪ [Sollgeschwindigkeit Max.]: Anzeige der maximal eingestellten Motor-Solldreh-
zahl in [U/min]
▪ [Sollgeschwindigkeit Min.]: Anzeige der minimal eingestellten Motor-Solldreh-
zahl in [U/min].
▪ [Toleranz minus]: Einen Wert für die untere Toleranzgrenze in [cm/min] einge-
ben. Bei Unterschreitung der unteren Toleranzgrenze erfolgt eine Fehlermel-
dung.
▪ [Toleranz plus]: Einen Wert für die obere Toleranzgrenze in [cm/min] eingeben.
Bei Überschreitung der oberen Toleranzgrenze erfolgt eine Fehlermeldung.
Der Rahmen [Dauern]
▪ [Betriebsdauer]: Zeigt an, wie lange der Antrieb seit der Inbetriebnahme mit
Strom versorgt wurde, in [h].
▪ [Freigabedauer]: Zeigt an, wie lange der Antrieb seit der Inbetriebnahme gelau-
fen ist, während sich die Maschine in der Betriebsart [Freigabe] befand.
Der Rahmen [Positionierung]
In das Eingabefeld [Referenzposition] können Sie die ermittelte Referenzposition
eingeben. Beachten Sie hierzu auch die die Anwendungsbeispiele am Ende dieses
Abschnittes.
ü Den [Hardware-Endschalter neg] als Referenzpunkt bestimmen:
1. Die Checkbox [Ref. Richtung neg.] aktivieren.
ð Der [Hardware-Endschalter neg] ist nun Referenzpunkt. Ist die Checkbox nicht
aktiviert, wird der [Hardware-Endschalter Pos] als Referenzpunkt bestimmt.
ü Die minimal/maximal mögliche Transportbreite einstellen:
1. In das Eingabefeld [Position minimal] / [Position maximal] die minimal und die
maximal mögliche Transportbreite eingeben.
ð Hiermit ist der Vorgang abgeschlossen.
Funktionsbeschreibung | 6
Ersa GmbH Betriebsanleitung_HF3_14_de | 28.10.2014 288 / 0

ü Die Sollgeschwindigkeit Des Antriebes einstellen:
1. In das Eingabefeld [Sollgeschwindigkeit] einen Wert in [U/min] eingeben.
ð Mit dieser Drehzahl wird der Motor während der Positionierung betrieben.
ü Die Referenzierung starten:
1. Die Schaltfläche
anklicken.
ð Die Referenzierung wird gestartet.
Die Statusanzeigen im Rahmen [Positionierung]
▪ [HW-Referenzschalter (grau=frei)] Zeigt den Status des Hardware-Referenz-
schalters an. Ist der Schalter nicht belegt, wird die LED grün dargestellt. Ist der
Schalter belegt, wird die LED grau dargestellt.
▪ [HW-Endschalter pos. (grün=frei)] Zeigt den Status des Hardware-Endschalters
in positiver Richtung der Achse an. Ist der Endschalter nicht belegt, wird die
LED grün dargestellt. Ist der Endschalter belegt, wird eine Meldung angezeigt.
▪ [HW-Endschalter neg. (grün=frei)] Zeigt den Status in negativer Richtung der
Achse an. Ist der Endschalter nicht belegt, wird die LED grün dargestellt. Ist der
Endschalter belegt, wird eine Meldung angezeigt.
▪ [Motor ist referenziert] Zeigt den Status der Referenzierung an. Ist eine Refe-
renzierung notwendig, wird die LED grau dargestellt. Ist keine Referenzierung
notwendig, wird die LED grün dargestellt.
▪ [Aktuelle Position] Zeigt die relative Position des beweglichen Transportholmes
zum feststehenden Transportholm in [mm] an.
▪ [Absolute Position] Zeigt die absolute Position der Achse in [mm] an.
Der Rahmen [Statusfehler]
Dieser Rahmen wird sichtbar, wenn Sie den waagerechten Scrollbalken nach rechts
verschieben. Liegt ein Statusfehler vor, wird die entsprechende LED grün darge-
stellt. Folgende Statusfehler werden angezeigt:
▪ [Allgemeiner Fehler]
▪ [Stromfehler]
▪ [Spannungsfehler]
▪ [Temperaturfehler]
▪ [Kommunikationsfehler]
▪ [Motorspezifischer Fehler]
▪ [Reserviert]
▪ [Herstellerspezifischer Fehler].
Die Überwachung der Pin-Stellung (Klappfederlaschen) aktivieren im
Rahmen [Pin-Stellung]
Dieser Rahmen wird sichtbar, wenn Sie den waagerechten Scrollbalken nach rechts
verschieben.
ü Die Überwachung aktivieren:
1. Die Checkbox [Überwachung aktiv] aktivieren.
ð Die Pins der Mittenunterstützung werden nun von der Steuerung über-
wacht.
Funktionsbeschreibung | 6
Ersa GmbH Betriebsanleitung_HF3_14_de | 28.10.2014 289 / 0