NXT系列 编程手册 1 - 第302页
PRG-NXTS-009S1 5. 其他的应用 NXT 系列 编程手册 289 检查供料器中的 X/Y 位置 11.显示 [Edit pickup posi tion] 步骤。请确保已经提前将 元件装载到正确位置中,然后 单击 [Acquire] 获取供料器中的元件 图像。获取的元件图像显示如下。 12.通过所显示的图像 检查 X- 和 Y- 方向上 的吸取位置。如 果需要移动吸取位置 ,请单击定 位按钮 (带有四个箭头的按钮) ,然后…
5. 其他的应用 PRG-NXTS-009S1
288 NXT 系列 编程手册
9. 从 [Tool] 菜单中选择 [Pickup Check]-[Pickup Check]。模组操作面板的背景色变为表
示模组正在进行测试的紫色。
备注 )进行吸取位置测试时供料器不会自动执行送料操作,而需要手动将元件送到吸取位
置。另外,送料数根据供料器的不同而有所不同。
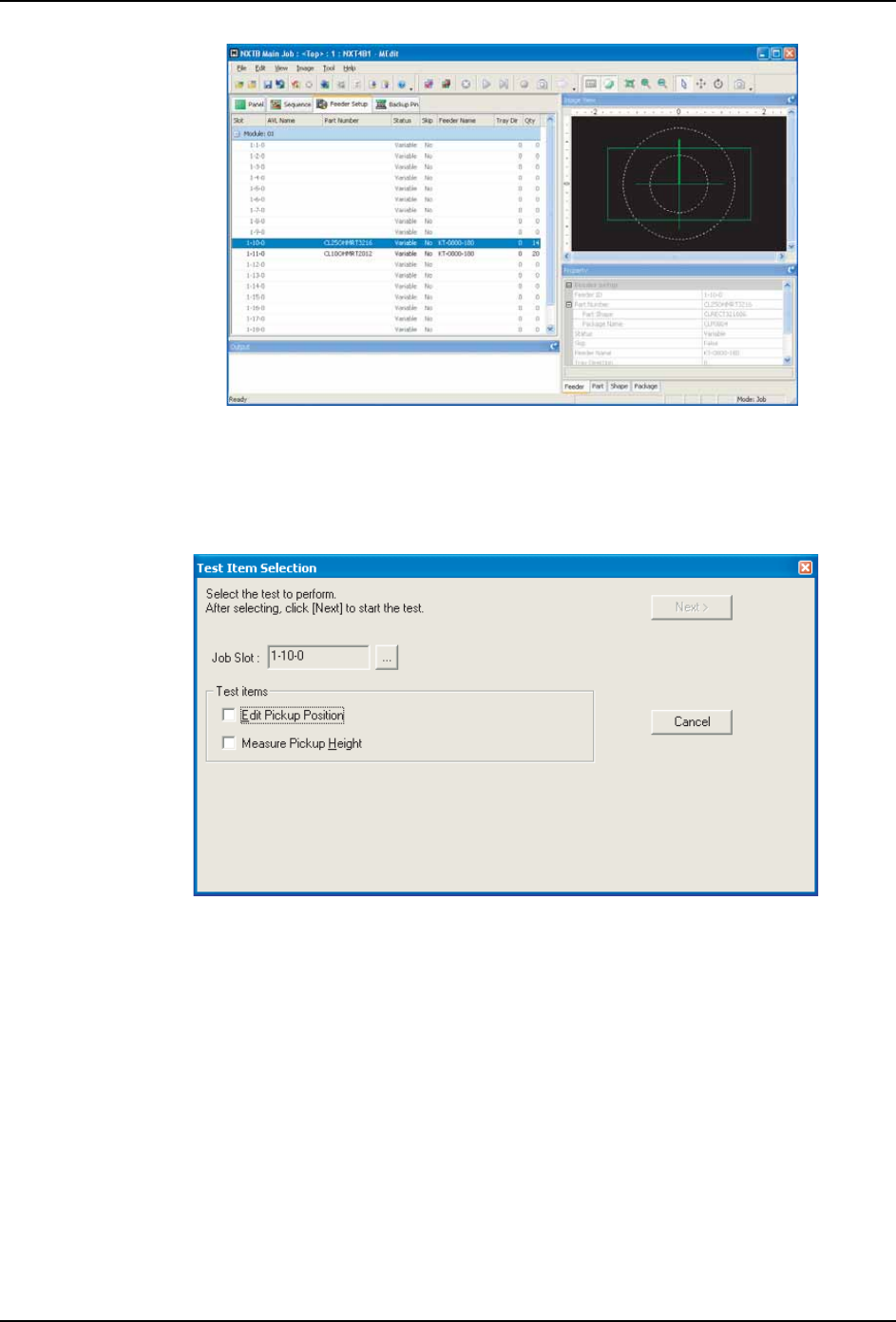
10.从新的显示部分中选择要执行测试的类型。如果选择了 [Edit Pickup Position] 选项,
请继续执行下一步。如果只选择了 [Measure Pickup Height] 选项,请跳至步骤 14。
备注 )因为吸取高度测量使用吸取压力控制,所以高度测量测试不能使用不带压力检查传感
器的工作头。在这种情况下,不能选择 “Measure pickup Height” 项目。
01PRG-0030Ea
NXTEJM013Ea
PRG-NXTS-009S1 5. 其他的应用
NXT 系列 编程手册 289
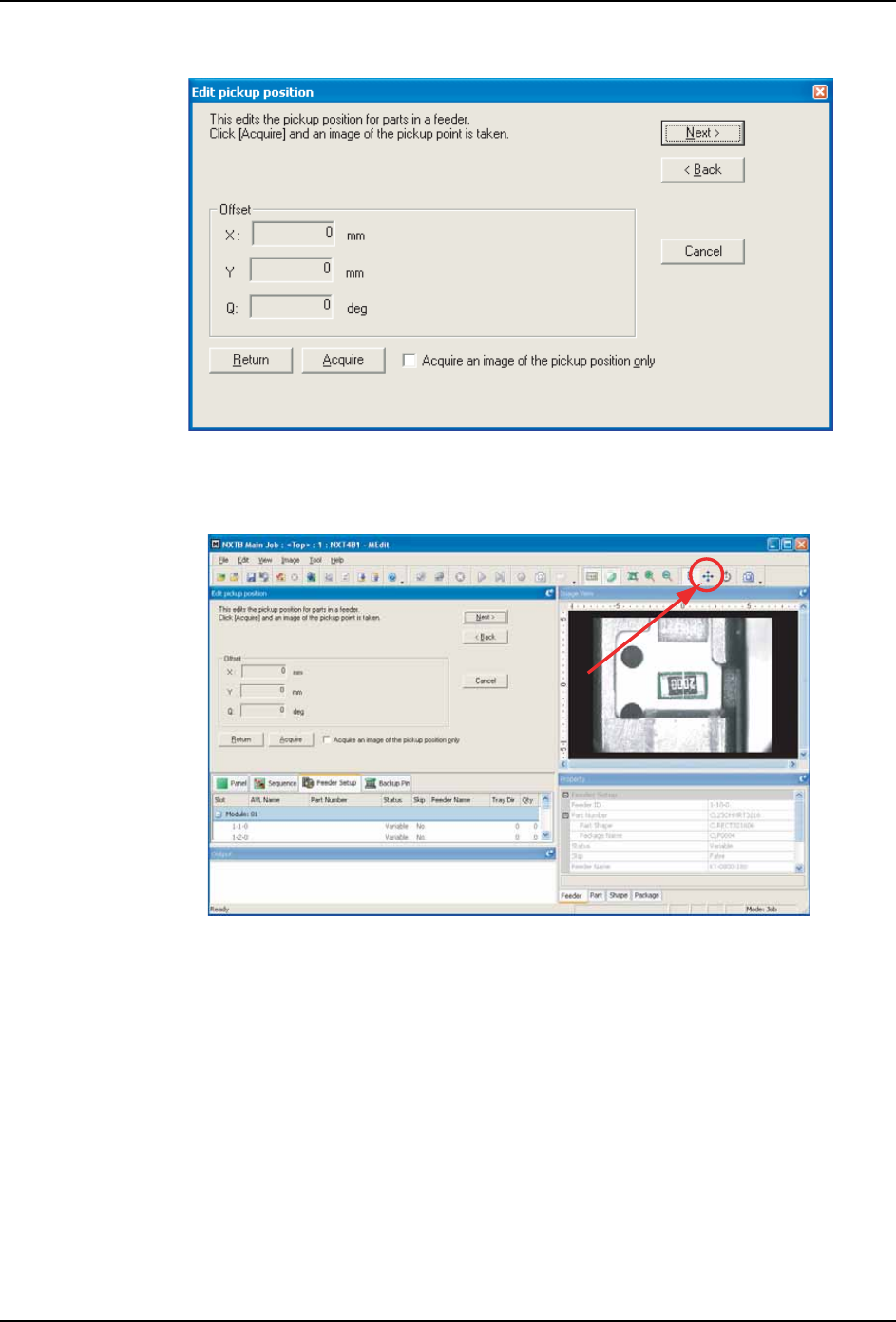
检查供料器中的 X/Y 位置
11.显示 [Edit pickup position] 步骤。请确保已经提前将元件装载到正确位置中,然后
单击 [Acquire] 获取供料器中的元件图像。获取的元件图像显示如下。
12.通过所显示的图像检查 X- 和 Y- 方向上的吸取位置。如果需要移动吸取位置,请单击定
位按钮 (带有四个箭头的按钮),然后在图像中单击要执行吸取的位置。
13.如果元件的吸取位置正确,请单击 [Next]。如果还没有执行吸取高度测试,请继续执
行步骤 19。
测试和编辑供料器上的元件吸取高度
14.显示 [Measure Pickup Height] 步骤。请确保已经提前将元件装载到正确位置中。
15.如果必须指定某个吸取 (自动选择 Job 中将要使用的吸嘴),请执行以下子步骤。
a. 单击 [...] 指定用于测试的吸嘴或机械爪 (仅对 OF 工作头)。
备注 )机器能够辨别出模组中存在的吸嘴和机械爪 (如果机器已经执行了检测)。在 Job 指
定吸嘴和机械爪可以用于高度测量的情况下,吸嘴和机械爪自动进行选择。
NXTEJM014Eb
NXTEJM015Eb
5. 其他的应用 PRG-NXTS-009S1
290 NXT 系列 编程手册
b. 在所显示的对话框中选择用于测量的吸嘴或机械爪 (仅对 OF 工作头),然后单击
[OK]。
备注 )如果模组还没有执行校正,就不知道吸嘴置放台上存在哪些吸嘴和机械爪,请单击
[Measure] 来对模组上存在的吸嘴和机械爪执行检查。
16.单击 [Measure] 执行吸取高度测试。
17.显示测试结果,自动决定 Z 修正量。可以手动来对该数值进行编辑。
备注 )出现错误时将显示对话框。单击对话框中的 [Yes] 尝试将工作头移动下来,然后再次
测量。如果吸取位置中没有元件,也将产生相同错误。如果还不确定元件是否存在,请
检查供料器中的元件状态。
注意 )如果对 OF 工作头进行测量,即使下降时吸嘴 (机械爪)没有与元件接触,Z 轴的最低
位置也将作为测量结果显示出来。如果再次进行测量,吸嘴 (机械爪)位置低于先前
测量结果 -1.5mm,则测量值将会发生很大变化。可以接受的结果的位置与先前结果基
本相同,即实际与元件接触的位置。所以要重复进行测量直到结果大致与先前相同。
18.决定 Z 修正量并且接受结果,单击 [Next]。
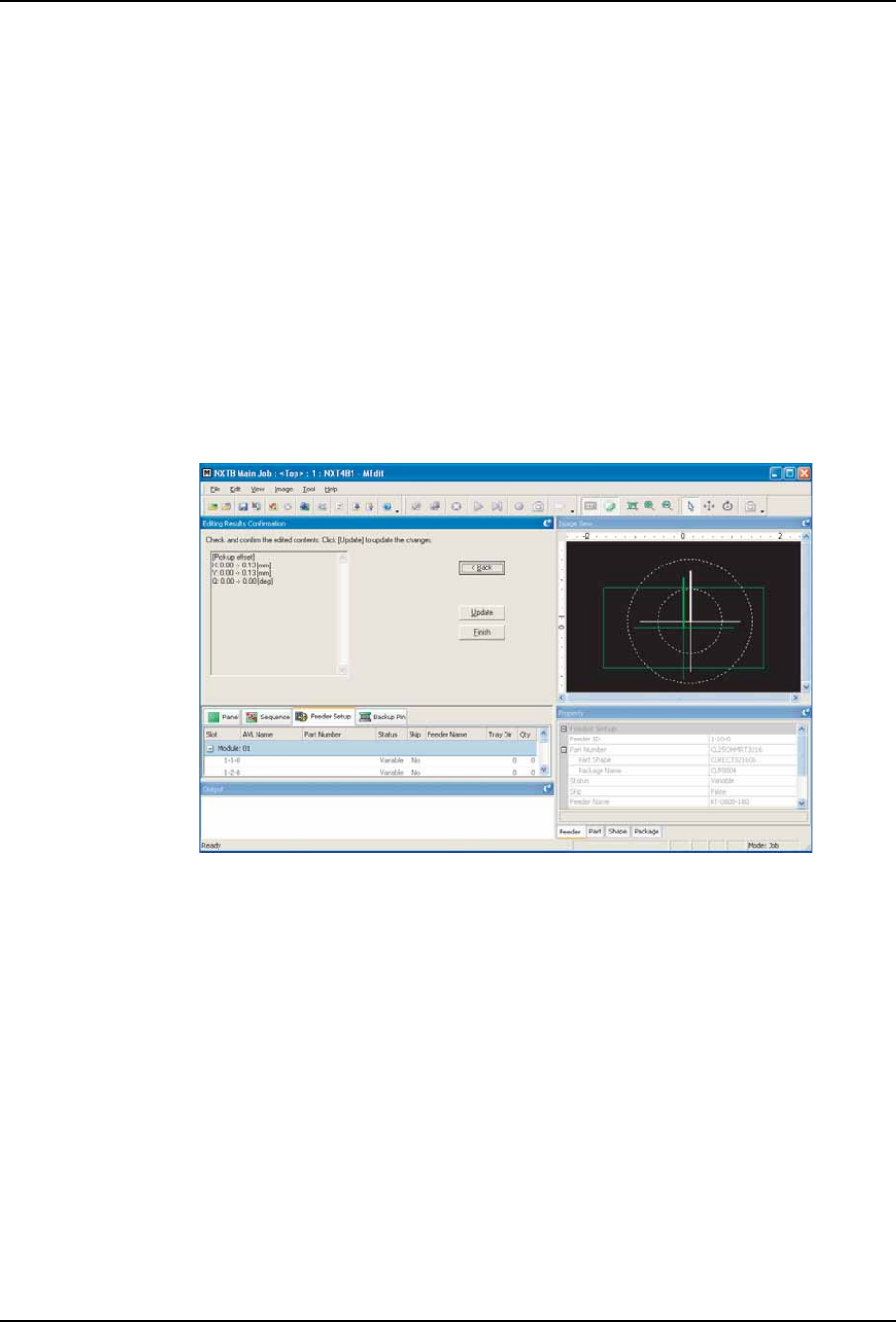
将变更后的设置发送次模组
19.显示吸取位置的修正量结果。检查结果,如果结果可接受,请单击 [Update] 将更改发
送次 Job 中。可以通过单击 [Back] 返次到吸取测试的前一步骤。
20.单击 [Finish] 结束测试。如果没有更改设置,这样就完成了测试。如果有更改,请执
行以下步骤。
21.显示指定向哪个模组传送数据的对话框。选择将更改传送次 Job 数据的模组,然后单击
[OK]。请注意,如果多个模组中存在相同元件,请选择所有存在相同元件的模组。
22.显示询问是否运行数据检查器的对话框。单击 [Yes] 使用数据检查器检查 Job 数据。
23.显示包含传送结果的对话框。检查结果,如果传送成功,请单击 [Close]。
NXTEJM019Ea