用户参考手册 - 第85页
4022 593 52681 用户参考手册 08.01 AX- 301/501 , AX-3/5 85 Components.fm 第 C2 章 处理数据 (元件、供料器和吸嘴) 图 89 摄像头视觉,倒装片的 额外项目 (参考) 摄像头视觉 参考;倒装片的额外项目 焊块 每个组的数量从 1 开始 极性 初始值:白色,范围:白色,黑色 焊块 X-Y 数量 初始值: 1 ,范围: 1 - 90 焊块偏差 X -Y 初始值 : 0.5 ,范…
第
C2
章
用户参考手册 4022 593 52681
84 AX-301/501, AX-3/5 08.01
处理数据 (元件、供料器和吸嘴)
Components.fm
图
86
摄像头视觉,其他带引脚片的额外项目 (参考)
图
87
摄像头视觉,离散引脚片的额外项目 (参考)
图
88
摄像头视觉,
CSP-
倒装片的额外项目 (参考)
摄像头视觉 参考;其他带有引脚的额外项目
引脚组 每个组的数量从 1 开始
引脚类型 初始值: J 型引脚
范围: J 型引脚,鸥翼
方向 引脚组侧面
初始值: N,
范围: N、 S、 W、 E
引脚数 所选引脚组的引脚数
初始值: 1,
范围: 1 - 113
引脚宽度 初始值: 0.5,
范围: 0.2 - 45 mm
引脚长度 初始值: 1,
范围: 0.2 - 45 mm
引脚间距 初始值: 1,
范围: 0.4 - 20 mm
偏差 X-Y 初始值: 0,
范围: -22.5 - 22.5 mm
摄像头视觉 参考;离散引脚片的额外项目
引脚 每个组的数量从 1 开始
引脚类型 初始值: J 型引脚,范围: J 型引脚,鸥翼
方向 初始值: N,范 围 : N、E、W、S、NS、EW、全 部
引脚宽度 初始值: 1,范围: 0.2 - 45 mm
引脚长度 初始值: 1,范围: 0.4 - 20 mm
偏差 X-Y 初始值: 0,范围: -22.5 - 22.5 mm
摄像头视觉 参考; CSP- 倒装片的额外项目
焊块组 每个组的数量从 1 开始
极性 初始值: 白色,范围: 白色,黑色
焊块 X-Y 数量 初始值: 1,范围: 1 - 90
焊块偏差 X -Y 初始值: 0.5,范围: 0.05 - 44 mm
焊块尺寸 初始值: 0.2,范围: 0.05 - 44 mm
偏差 X -Y
4022 593 52681 用户参考手册
08.01 AX-301/501, AX-3/5 85
Components.fm
第
C2
章
处理数据 (元件、供料器和吸嘴)
图
89
摄像头视觉,倒装片的额外项目 (参考)
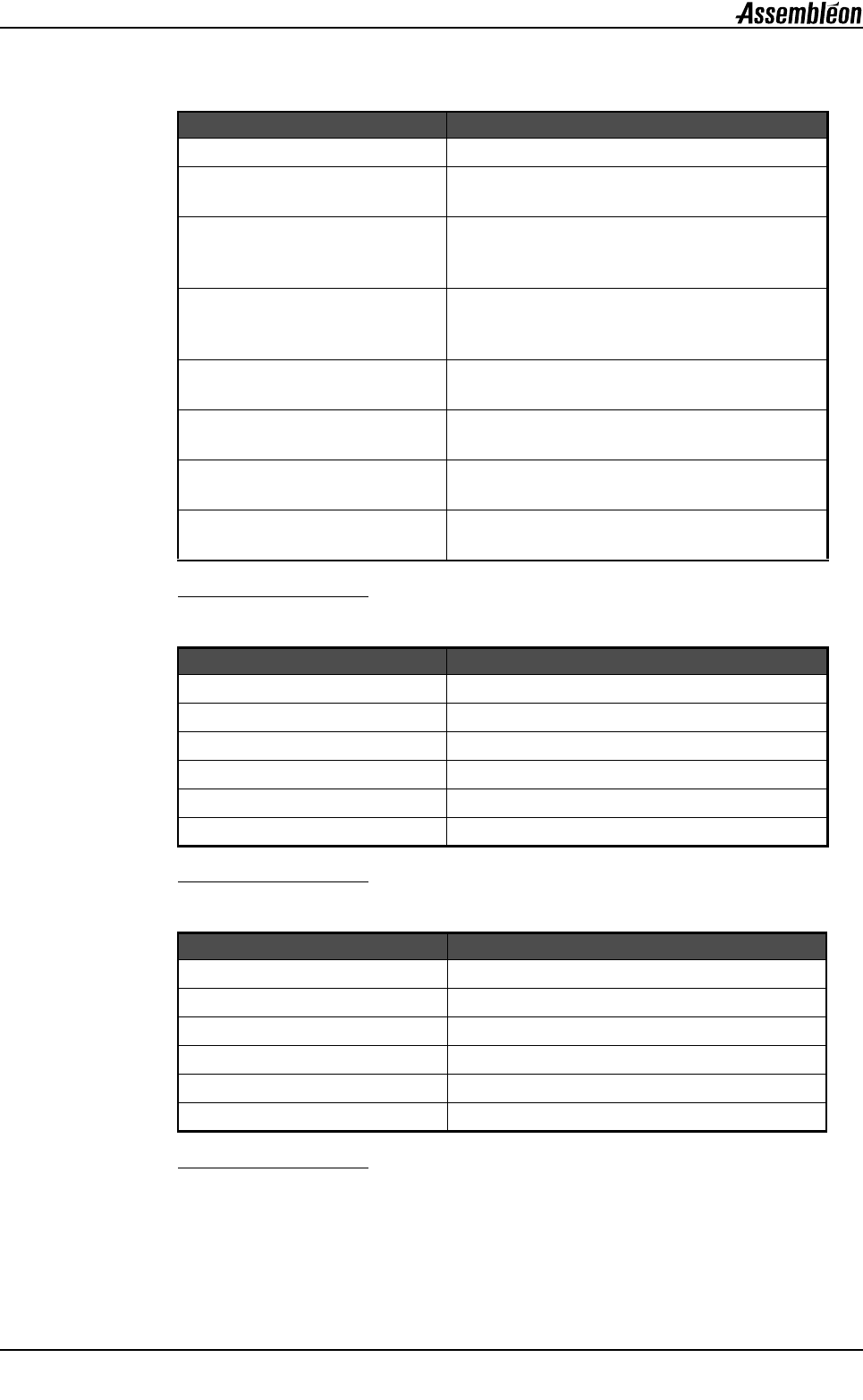
摄像头视觉 参考;倒装片的额外项目
焊块 每个组的数量从 1 开始
极性 初始值:白色,范围:白色,黑色
焊块 X-Y 数量 初始值:1,范围:1 - 90
焊块偏差 X -Y 初始值:0.5,范围:0.05 - 44.0 mm
焊块尺寸 初始值:0.2,范围:0.05 - 44.0 mm
处理 参考;全球
最大自动重新拾取拾取
错误
生成错误之前的自动重新拾取次
数。
初始值:2,范围:0 - 10
最大自动重新拾取检测
错误
生成检测错误之前的自动拾取次
数。
初始值:2,范围:0 -10
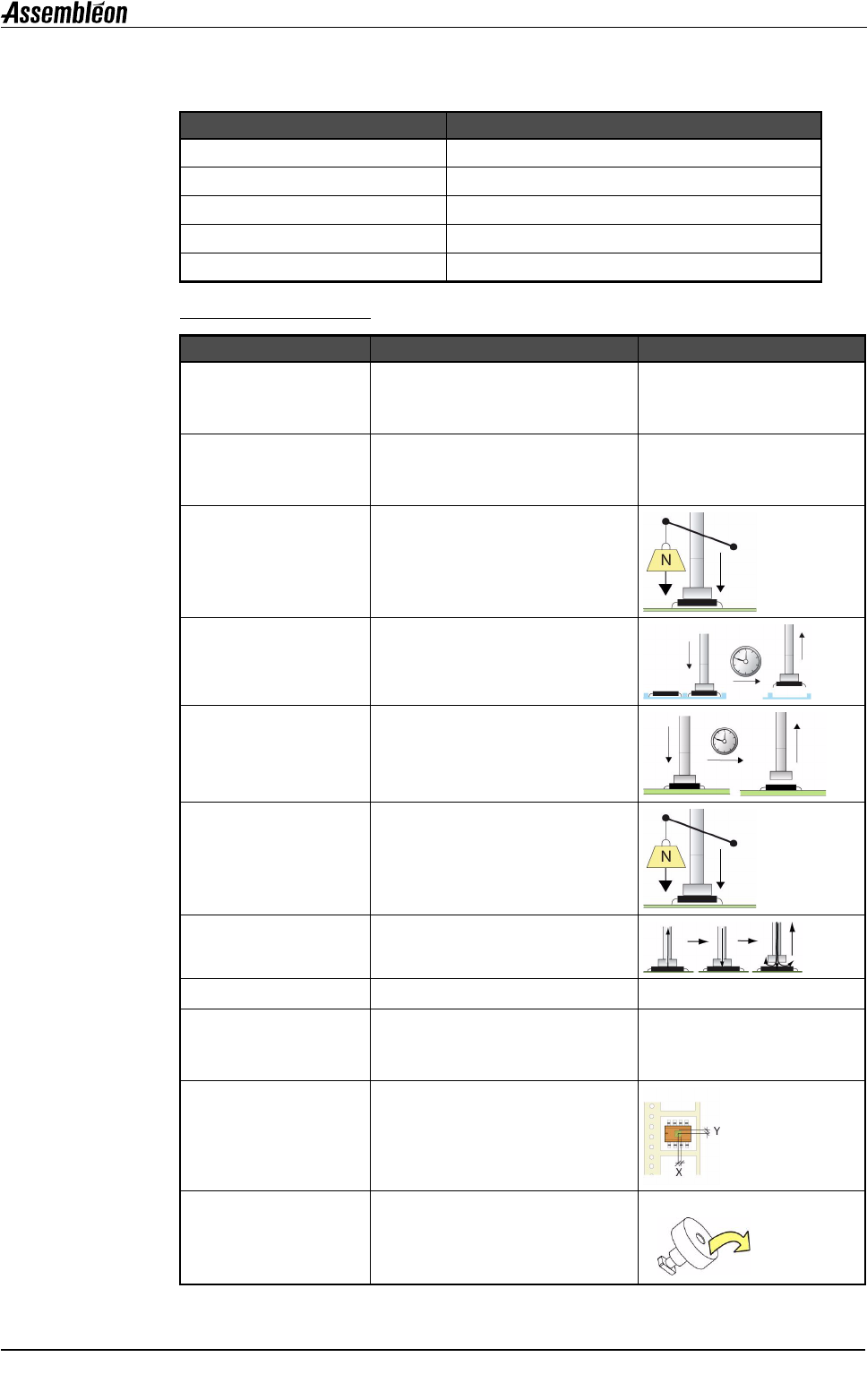
拾取冲击力 N 拾取时元件上受到的力
初始值:4,范围:0.1 - 8 N
拾取停留时间 s 从吸嘴降至元件上至吸嘴从拾取
位置提升元件之前的时间。
初始值: 10,范围: 0 - 5000 mS
贴片停留时间 从接触到电路板到释放元件的时
间。
初始值: 35,范围: 0 - 5000 mS
贴片力 N 贴片时元件上受到的力
初始值: 4,范围: 0.1 - 8 N
吹气 初始状态: 开,
范围: 开,关
激光存在检测 使用激光检测元件
真空存在检测 使用真空检测吸嘴上的元件
初始状态: 关,
范围: 开,关
最大拾取校正 X -Y 允许的拾取位置的最大校正。
初始值: 0.6,
范围: 0 - 10 mm
吸嘴类型 有关吸嘴详情,请参见图 78。
吸嘴名称
第
C2
章
用户参考手册 4022 593 52681
86 AX-301/501, AX-3/5 08.01
处理数据 (元件、供料器和吸嘴)
Components.fm
图
90
全球处理 (参考)
处理等级 所选吸嘴的处理等级。
初始状态:中,范围:低,中,高,
精度校验 (选择低表示低级处
理,这样精度更高)。
间距(mm 为单位)为 > 0.8
时,“低”
间距 (
mm
为单位)为
0.5 -
0.8
时,“中”
间距(mm 为单位)为 <0.5
时,“高”
拾取校正 X -Y 设定所选吸嘴的拾取校正
初始状态:关,
范围:开,关
元件存在阈值 % 使用真空来检测所选吸嘴的元件
初始状态:关,
范围:0 - 100%
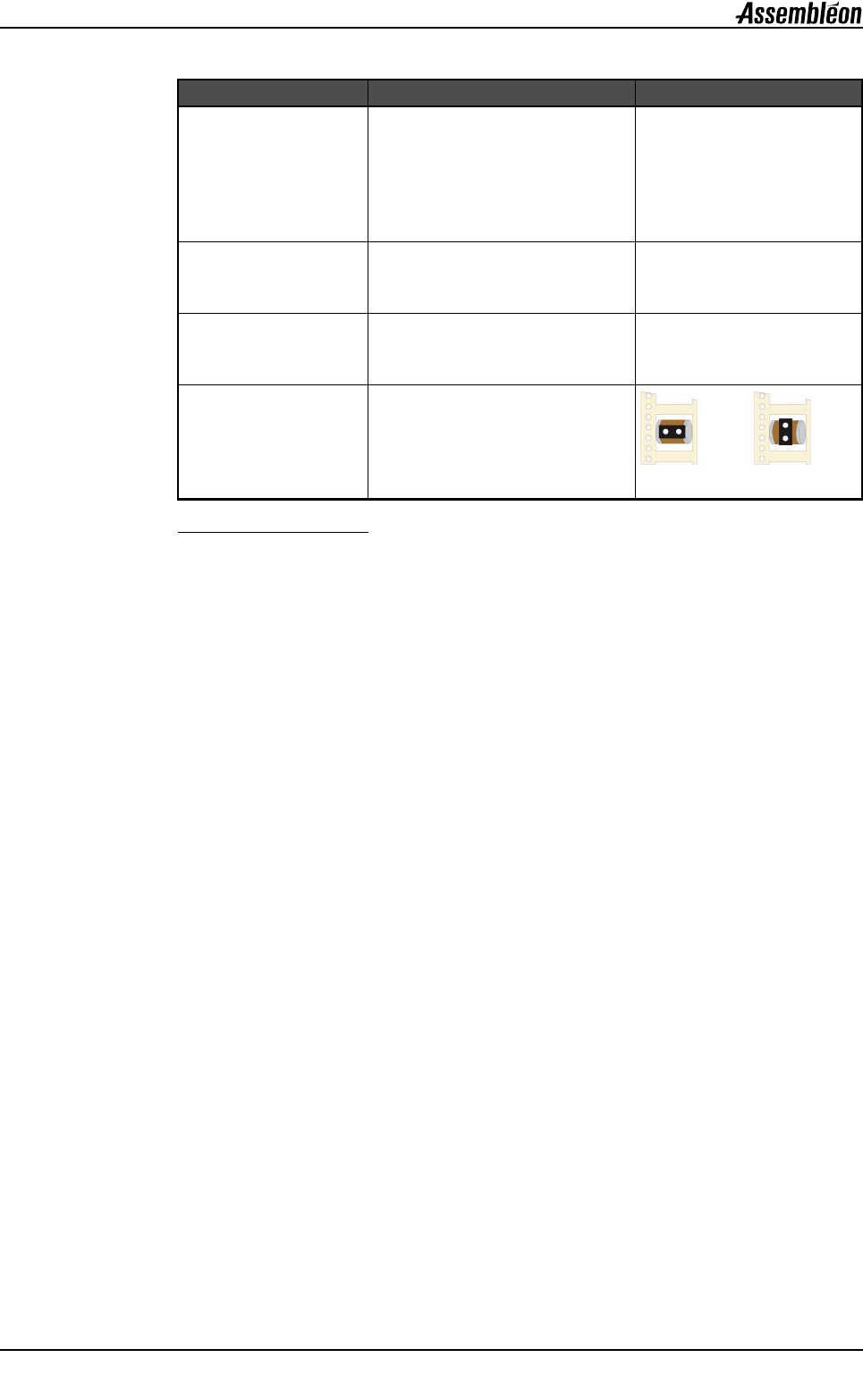
拾取偏差 Rz 角度 与元件相关的吸嘴角度
初始状态:0,
范围:0、 90、 180、 270 度
0
0
旋转 90
0
旋转
处理 参考;全球