00191805-01.pdf - 第260页
6 Funciones ópticas Instrucciones de serv icio SIPLACE S -23 HM 6.6 Probar el componente Vers ión de software SR.406.xx Edición 02/00 ES 260 Con "ESC" aband ona esta opci ón, la imagen de ví deo se oculta. En l…
Instrucciones de servicio SIPLACE S-23 HM 6 Funciones ópticas
Versión de software SR.406.xx Edición 02/00 ES 6.6 Probar el componente
259
6
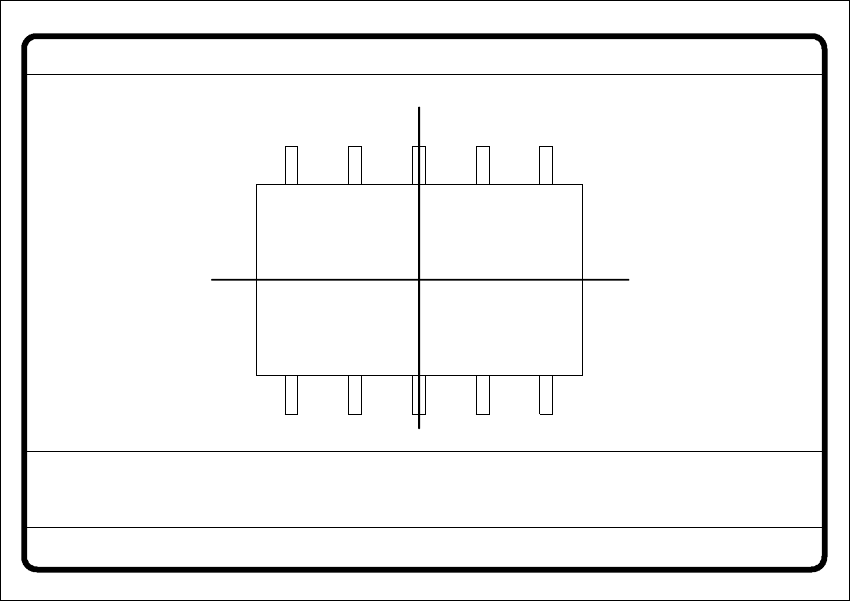
Fig. 6.6 - 21 Menú "Probar el componente", imagen de vídeo "Medir - COe"
Medición óptica de componentes convencionales con conexiones de patillas 6
La cruz reticular indica el centro de gravedad del componente. El contorno del componente se
resalta en color. 6
Los valores de medición representan los parámetros geométricos del componente como 6
– desviación de patilla
El valor de desviación de patilla se edita cuando ha seleccionado el modo de medición "Pin"
o "Bolita".
– distribución
El valor se edita cuando está activo como último paso de medición el modo "Esquina".
– número de patillas
– desplazamiento X / Y
– ortogonalidad
– dimensiones del componente
– ángulo de giro y
– factor para la calidad de la medición.
BE messen GF-Nr. = 5
X-Off.[mm] = ... Y-Off.[mm] = ... Phi[Grad] = ...
Orth.[Gr] = ...
Beinanzahl = ...
Qualität = ...
Länge[mm] = ...
Breite[mm] = ...
Teilung[mm] =
RET: BE messen
B.abw.[mm] =
6
RET: medir - CO
Desv. patilla [mm] =
Número de patillas= ...
X-Off. [mm] = ...
6
Medir - CO
6
N° f. caja = 8
Distribución [mm] =
Ortog. [Gr] = ...
Y-Off. [mm] = ...
Longitud [mm] = ...
Phi [Grados] = ...
Ancho [mm] = ...
Calidad = ...

6 Funciones ópticas Instrucciones de servicio SIPLACE S-23 HM
6.6 Probar el componente Versión de software SR.406.xx Edición 02/00 ES
260
Con "ESC" abandona esta opción, la imagen de vídeo se oculta. En la pantalla se visualiza de
nuevo el menú "Probar el componente". 6
Colores superpuestos de los pasos individuales de medición en el servicio paso a paso 6
1. Cuerpo (Size Mode) 6
La definición de los métodos de medición la encuentra en el aparte 6.6.4.14
, página 284. 6
Este método de medición lo reconoce en las ventanas rotativas alrededor de las aristas de com-
ponentes. 6
Procedimiento 6
(1) Dentro de la ventana de búsqueda se forman perfiles en dirección X y Y. En base a los
gradientes resultantes y un filtro geométrico se determina la posición aproximada del
componente.
(2) Las ventanas rotan alrededor de las aristas de componente. Para cada ventana se determina
el perfil y los gradientes. La suma de los gradientes es la medida de correspondencia del
ángulo de la ventana con la posición del componente.
Si la suma de gradientes alcanza un máximo, se ha determinado la posición angular del
componente.
(3) Bajo el ángulo determinado en (2) se repite el primer paso (1). Ahora puede determinarse de
forma más exacta la posición del componente en dirección X y Y.
Rectángulo: 6
verde: Tolerancias de imagen X y Y 6
naranja: Dimensiones de componente y tolerancias emitidas por la estación 6
azul: Ventana de búsqueda para el reconocimiento de posición 6
Anotaciones 6
1. La posición del componente encontrada debe estar situada dentro del rectángulo de
color verde, de lo contrario no se dota el componente. 6
¡Es válido para todos los pasos de medición! 6
2. El componente debe encontrarse dentro de la ventana de color naranja, de lo
contrario se ponen en duda los resultados de medición. 6
3. Las ventanas de búsqueda deben tener la misma orientación del componente
y ser más grandes que el mismo. 6

Instrucciones de servicio SIPLACE S-23 HM 6 Funciones ópticas
Versión de software SR.406.xx Edición 02/00 ES 6.6 Probar el componente
261
Líneas:
rojo: aristas encontradas del componente 6
Anotaciones: 6
Frecuentemente las líneas rojas son cubiertas por otras y eventualmente no se reconocen.6
Color superpuesto: 6
gris: Perfil en la respectiva dirección de integración 6
azul: Gradientes de los perfiles de arriba 6
amarillo: Resultado del filtro geométrico 6
rojo: Límites de interpolación para la determinación de posición 6
azul claro: Resultado de interpolación -> posición 6
Anotaciones: 6
El resultado de interpolación debe encontrarse alrededor del máximo del filtro geométrico.6
Cruz: 6
blanco: Resultado del reconocimiento de posición -> X, Y, ángulo 6
Gráfica: 6
Función resultado de la búsqueda angular (ventana rotativa). 6
Anotaciones: 6
El mínimo (corresponde al máximo de la suma de los gradientes) corresponde a la posición
angular no interpolada. El resultado final (por medio de interpolación) se visualiza con una
línea de color azul claro. La precisión de la gráfica está limitada por la resolución del mo-
nitor. 6
6
2. Hilera (Row Mode) 6
La definición de los métodos de medición la encuentra en el aparte 6.6.4.14
a partir de la página
284
. 6
Este método de medición lo reconoce en algunas ventanas alrededor de las patillas centrales de
una fila. 6
Procedimiento: 6
(1) El reconocimiento de posición se realiza por medio de la formación de perfil ortogonal a la
dirección de la fila. Por medio de ello se determinan las aristas del componente.
(2) Por medio de dos ventanas adicionales puede determinarse la posición angular del compo-
nente.