00196466-04-BA-SX12-DX12_ET.pdf - 第126页
3 Tehnilised andmed ja sõlmed Kasutusjuhend SIPLACE SX1/SX2/DX1/DX2 3.6 Ladumispea Alates tarkvaraversioonist SC.705.xx Välja antud 10/2011 ET 126 3 Joon. 3.6 - 5 SIPLACE MultiS tar - tagantvaade, funktsioonigrupid osa 3…
Kasutusjuhend SIPLACE SX1/SX2/DX1/DX2 3 Tehnilised andmed ja sõlmed
Alates tarkvaraversioonist SC.705.xx Välja antud 10/2011 ET 3.6 Ladumispea
125
3
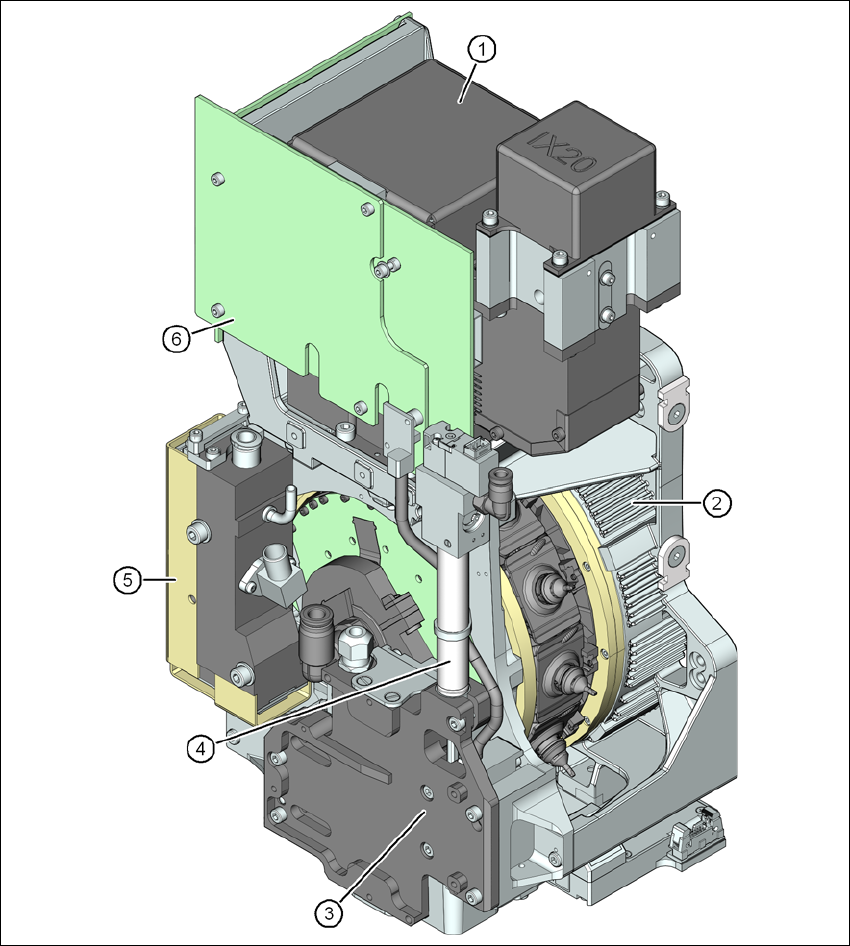
Joon. 3.6 - 4 SIPLACE MultiStar - eestvaade, funktsioonigrupid osa 2
(1) C&P- komponendikaamera, tüüp 30, 27 x 27, digitaalne
(2) Pöördemomentmootor täheajamile
(3) Z-ajam (lineaarmootor)
(4) Tagastussilinder
(5) Rõhureguleerimisventiil
3 Tehnilised andmed ja sõlmed Kasutusjuhend SIPLACE SX1/SX2/DX1/DX2
3.6 Ladumispea Alates tarkvaraversioonist SC.705.xx Välja antud 10/2011 ET
126
3
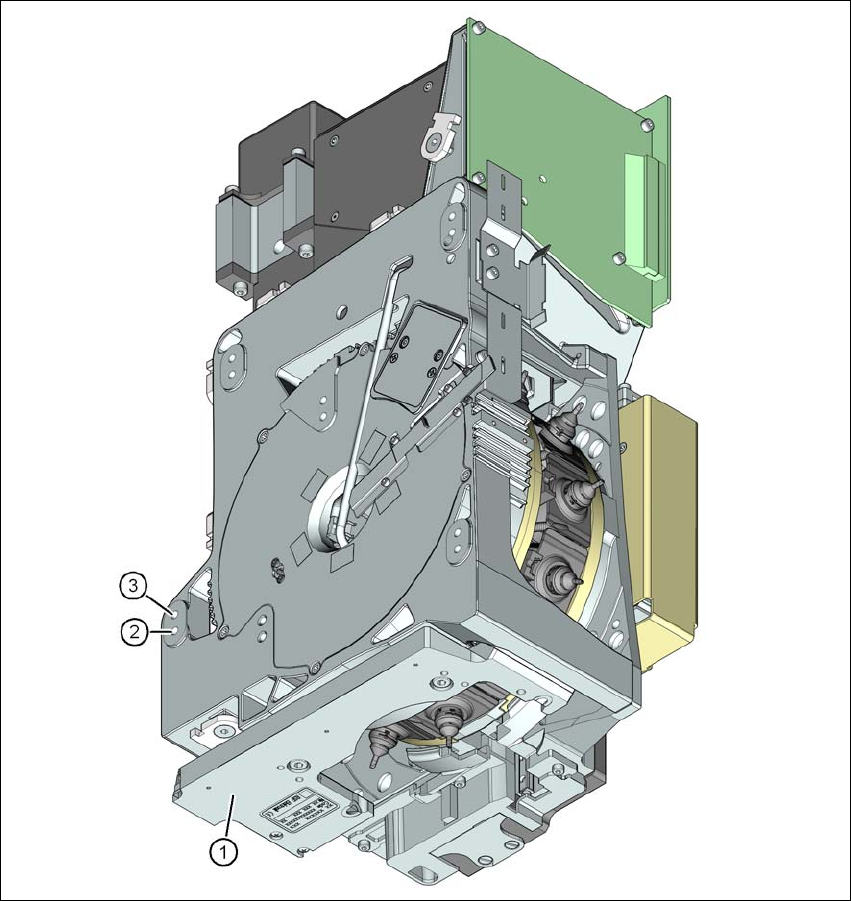
Joon. 3.6 - 5 SIPLACE MultiStar - tagantvaade, funktsioonigrupid osa 3
(1) Komponendiandur
(2) Montaažiaasend kuni komponendikõrguseni 11,5 mm
(3) Montaažiasend kuni komponendikõrguseni 6 mm
Kasutusjuhend SIPLACE SX1/SX2/DX1/DX2 3 Tehnilised andmed ja sõlmed
Alates tarkvaraversioonist SC.705.xx Välja antud 10/2011 ET 3.6 Ladumispea
127
3.6.2.1 Kirjeldus
MultiStar ühendab omavahel mõlemad teineteisele vastupidised omadused nagu kõrge ladumis-
võimsus ja kõrge paindlikkus. Väiksemate komponentide (kuni 27 x 27 mm²) puhul kasutab Mul-
tiStar kõrgema ladumisvõimsuse saavutamiseks Collect&Place-meetodit. Sel juhul
tsentreeritakse komponente integreeritud komponendikaamera abil optiliselt. Suuremate kompo-
nentide käsitsemisel (kuni 50 x 40 mm²) kasutab ladumispea Pick&Place-põhimõtet, mille puhul
tsentreeritakse komponente optiliselt statsionaarse kaameraga.
Mõlema ladumispõhimõtte C&P ja P&P kombinatsioonist lähtub ka MultiStari nimi. Seda tuntakse
ka CPP-tööpeana.
CCP-tööpea 12 segmenti on paigutatud tähekujuliselt. Kõrge pöördemomendiga pöördemoment-
mootor pöörab tähte horisontaaltelje (tähetelje) ümber.
Iga segment on varustatud imiotsaku pööramiseks isikliku DP-ajamiga. Seetõttu pole vaja imiot-
sakuid õigesse asendisse pöörata üksiku tööpeajaama pööramisega. Need pööratakse õigesse
ladumisasendisse suvalisel ajal üksteisest sõltumatult.
Igal segmendil on eraldi vaakumgeneraator. See vähendab oluliselt vaakumi ja puhurõhu vahelist
ümberlülitusaega, lisaks sellele on võimalik igal üksikul imiotsakul vaakumikontrolli teostada.
Segmentide Z-mootorina kasutatakse lineaarmootorit koos lineaarse nihkemõõtmissüsteemiga,
mis tagab äärmiselt suure täpsuse. Haaramis- ja ladumisasendis nihutab Z-ajam segmente verti-
kaalsuunas üles või alla.
Nagu kõiki teiste SIPLACE Collect&Place-tööpeade puhulgi on digitaalne komponendikaamera
integreeritud ladumispeasse. Komponentide tsentreerimisel aitab täiendavate liikumisteekondade
kadumine kaasa suuremate töötluskiiruste saavutamisele.
Ladumispea alaküljel asuv komponendisensor mõõdab komponente haaramis-/ladumisposit-
sioonis. Z-telje iga liikumise kohta on võimalik teostada imiotsaku tipul vastavaid mõõtmisi ja ot-
sustada, kas komponent on imiotsakule nakkunud ja kui suur on komponendi kõrgus.
3.6.2.2 SIPLACE MultiStari montaažiasendid
CPP-tööpead saab monteerida peahoidikus erinevatesse positsioonidesse:
– MultiStar ülemises montaažiasendis
Selles positsioonis on võimalik töödelda kõiki komponente kuni suuruseni 50 x 40 mm² ja
kõrguseni 11,5 mm. 3
– MultiStar alumises montaažiasendis
Selles positsioonis laob CPP-tööpea komponente kuni suuruseni
27 x 27 mm² ja komponendikõrguseni 6 mm, kasutakse Collect&Place-meetodit. 3