KD-2077_MCP_Rev1.0_C.pdf - 第7页
R e v . 1 . 0 机械控制参数 2-2 2-2 输入 选择了菜单条的 [入力] 之后,就会显示出如图 2-2 所示的输入菜单。 输入菜单有 [Head]、[XY]、[ 传送 ]、[ 图象 ]、[ 其它 ]5 各项目。 图 2-2 输入菜单
Rev1.0
机器控制参数
2-1
2 菜单
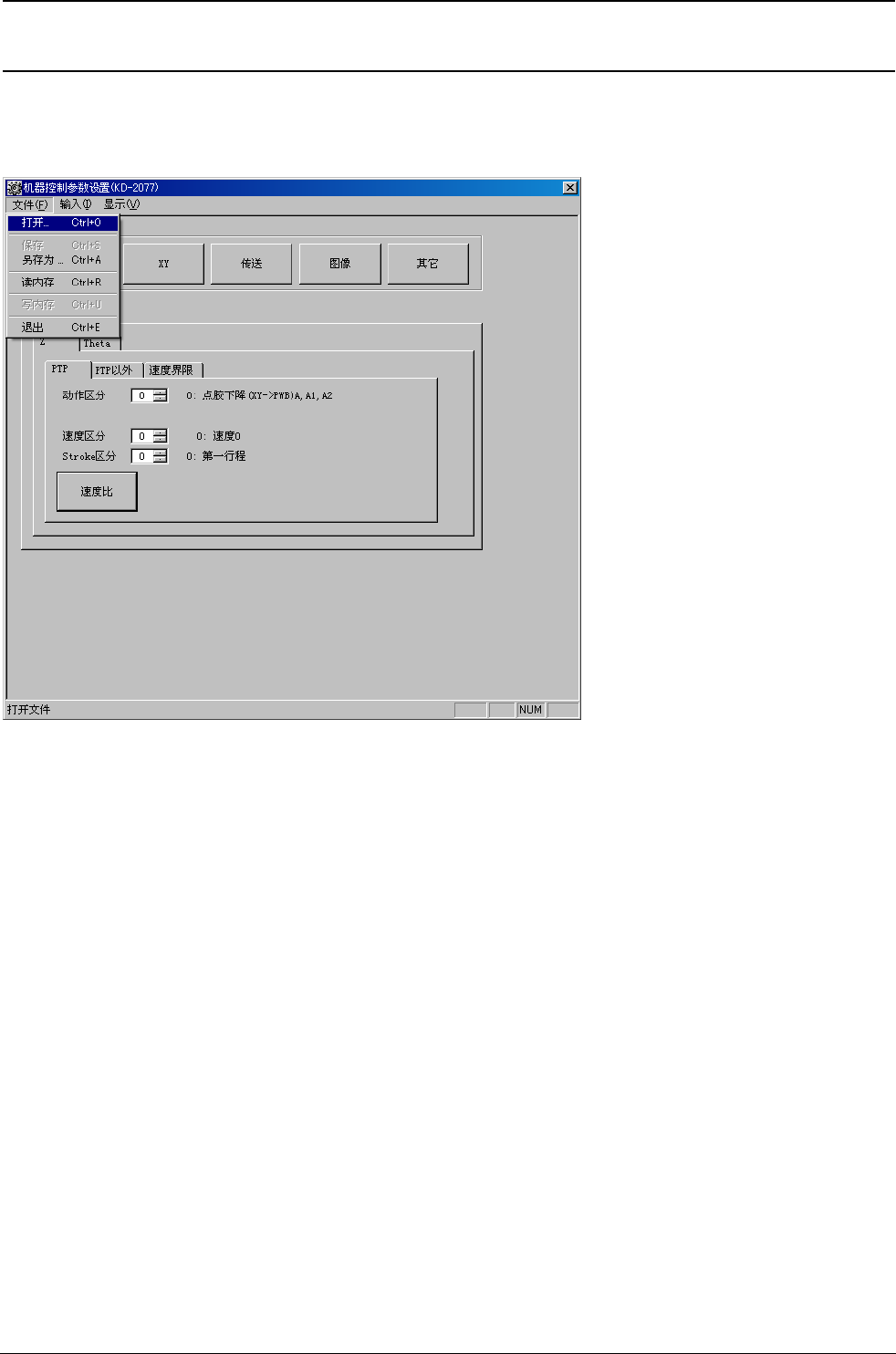
2-1 文件
选择了菜单的[文件]之后,就可以显示出如图 2-1 所示的文件菜单。
图 2-1 文件菜单
(1)打开
读取现在保存的数据文件。
(2)保存
把编辑的内容重写到文件上。
[保存]仅在写入了文件时有效。
(3)另存为
起新名称把编辑的内容保存到文件中。
(4)读内存
读取共用存储器内的机械控制参数。
本实用软件起动时,自动地读取共用存储器内的机械控制参数。
(5)写内存
编辑的内容写入到共用存储器里。
[写内存]仅在编辑数据变更时有效。
(6)退出
结束机械控制参数的数据编辑。
编辑数据变更时,确认保存。
另外,选择指令按键的[退出]也可以结束实用软件。
Rev.1.0
机械控制参数
2-2
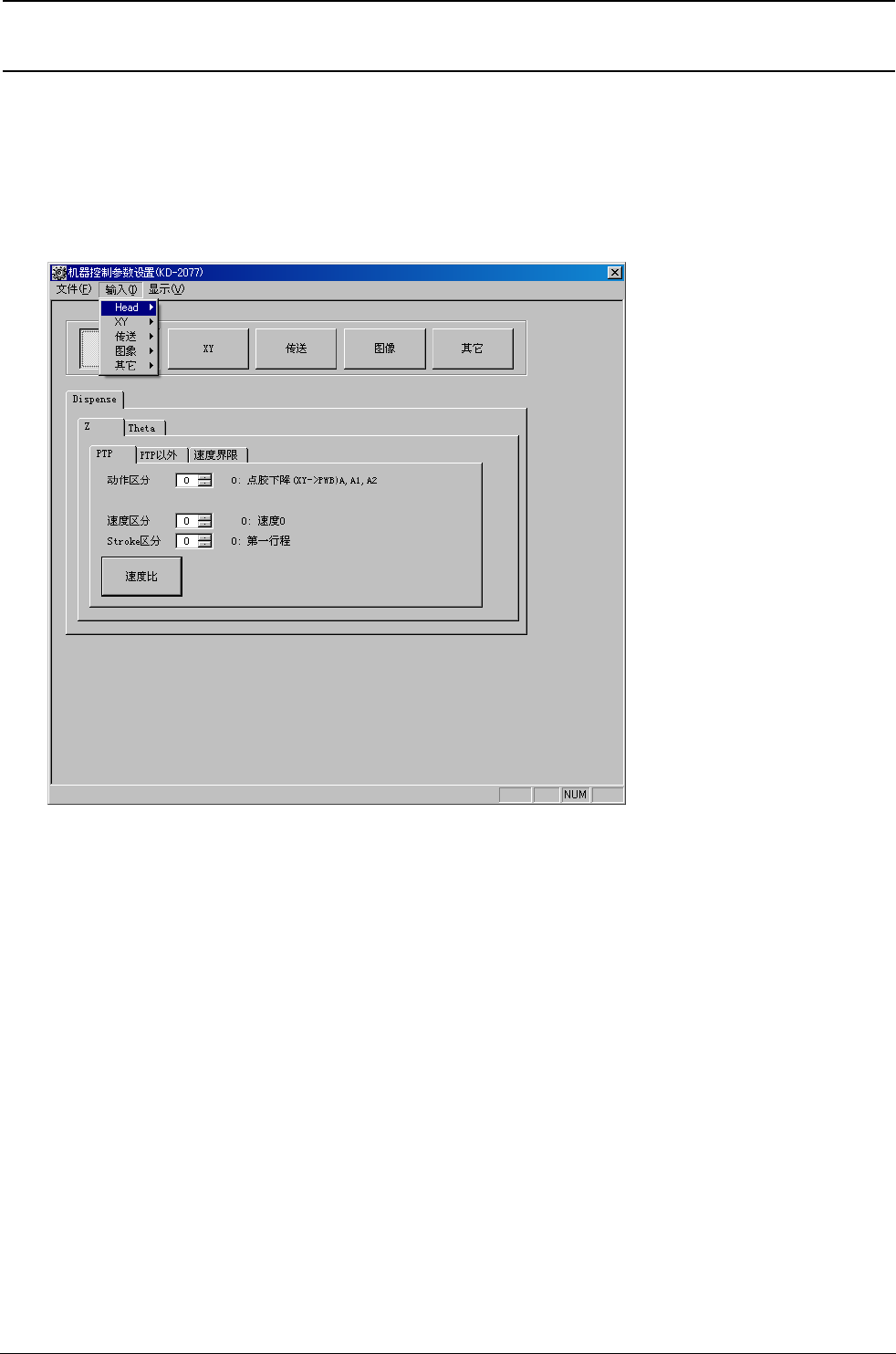
2-2 输入
选择了菜单条的[入力]之后,就会显示出如图 2-2 所示的输入菜单。
输入菜单有[Head]、[XY]、[传送]、[图象]、[其它]5 各项目。
图 2-2 输入菜单
Rev.1.0
机械控制参数
2-3
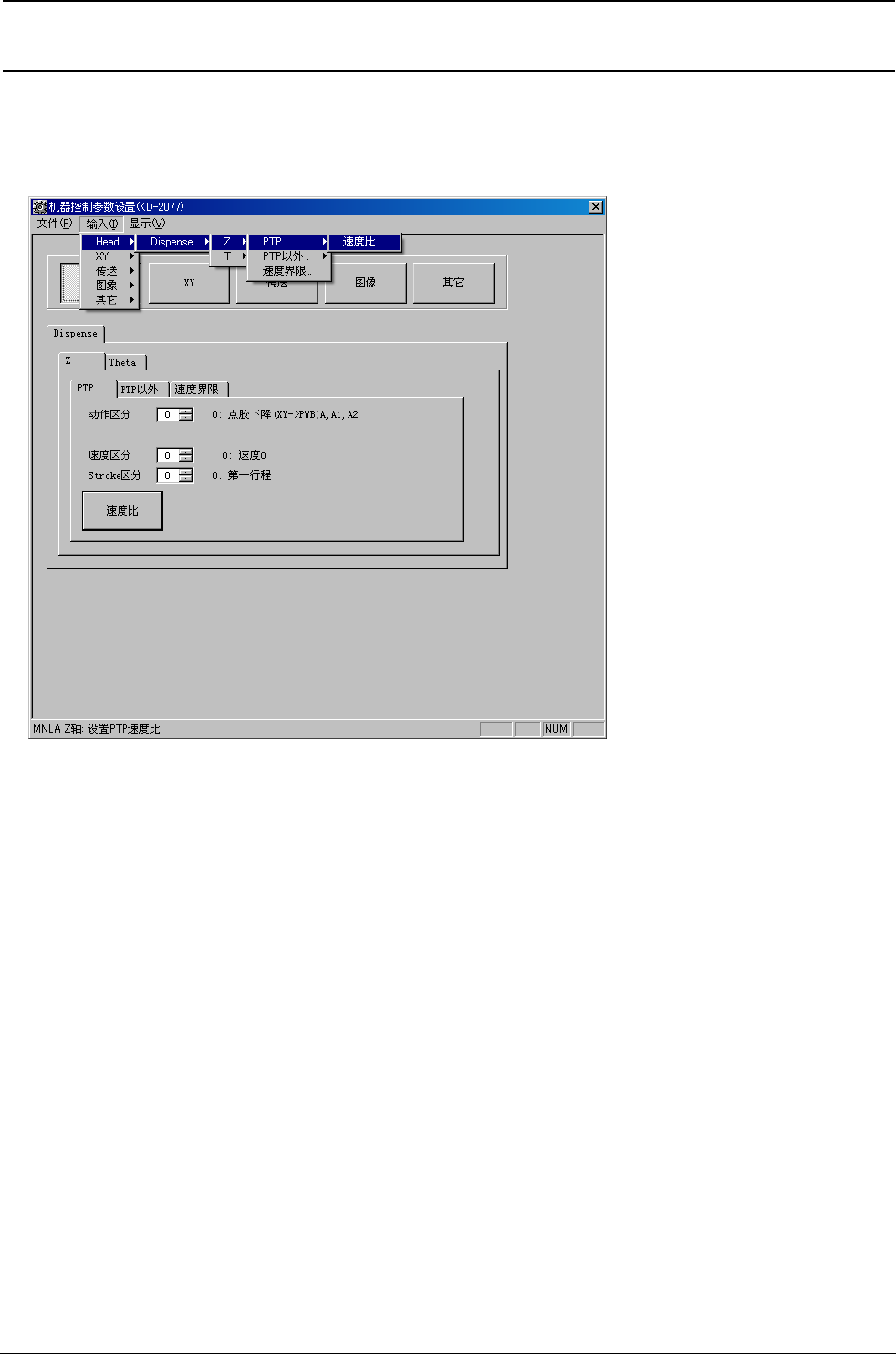
2-2-1 点胶头
选择了[Head]之后,就会如图 2-2-1 所示显示出级联菜单。
图 2-2-1 点胶头菜单
(1)Dispense
进行点胶头(Dispense Head)的 Z 轴,θ轴的设定。
(a) 进行Z轴的 PTP 动作的速度比的设定。
(c) 进行Z轴的 PTP 以外的动作速度比的设定。
(e) 进行Z轴的速度限制呼出、分辨率的设定。
(g) 进行θ轴的 PTP 动作速度比的设定。
(i) 进行θ轴的 PTP 以外的动作速度比的设定。
(k) 进行θ轴的速度限制呼出和分辨率的设定。