SIPLACE 80 F4_EN.pdf - 第26页
25 Description The component vision module is integrated dir ectly into the rev olver head and images the component in question. While the component is cycl ing onwa rd into the nex t sta- tion of the revolver head, the …
24
Description
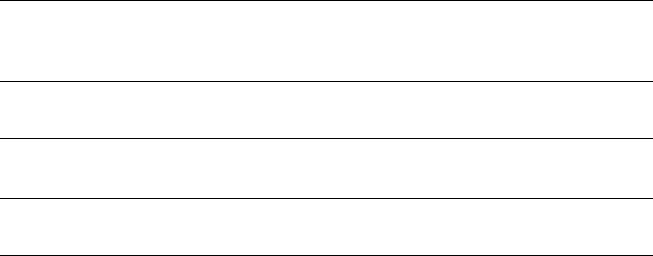
In the cluster technology each
subpanel is assigned an ink spot.
If this is present during the meas-
urement via the PCB vision mod-
ule, the corresponding subpanel is
not populated. Naturally it is also
possible to prevent the population
of the subpanel when the ink spot
is missing.
With this function it is possible to
prevent costs arising due to un-
necessary population of faulty
subpanels.
P
PP
Po
oo
os
ss
si
ii
it
tt
ti
ii
io
oo
on
n n
n R
RR
Re
ee
ec
cc
co
oo
og
gg
gn
nn
ni
ii
it
tt
ti
ii
io
oo
on
n n
n o
oo
of
f f
f F
FF
Fee
eeee
eed
dd
de
ee
er
rr
r
The pick-up position of the com-
ponent can be determined pre-
cisely with the aid of the position
recognition of the feeder. It is acti-
vated each time after a change of
feeder or component table. The
offset in position relative to the
stored ideal position is determined
on the basis of fiducials on the
feeder modules using the PCB vi-
sion module. This provides a very
high pick-up reliability even for the
very first component. This is par-
ticularly important with small com-
ponents.
Vision Sensor Technology:
Recognition of Faulty PCBs via Ink Spots
Position Recognition of Feeder
Ink Spot Criteria
Fiducial shapes
Single cross (recommended because
susceptibility to disruption lowest)
rectangle, square, circle, etc.
Masking material
Mat dark (light-absorbing)
Not recommended: white or shiny
Size or fiducial masking
Circular: Diameter ≥ 8.1 mm
Square: Edge length ≥ 5.7 mm
Fiducial recognition time
(travel > 100 mm)
Mark masked: 1.2 s
Mark not masked: 0.4 s
25
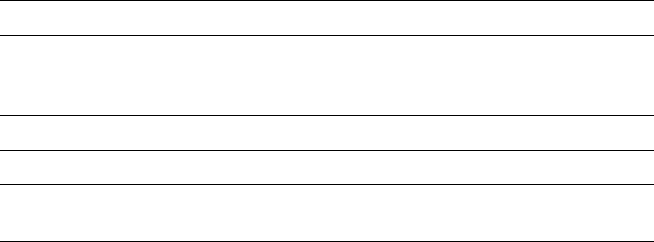
Description
The component vision module is
integrated directly into the revolver
head and images the component
in question. While the component
is cycling onward into the next sta-
tion of the revolver head, the re-
corded image is being evaluated
by the central vision system. The
component is then corrected by
the appropriate angle in this sta-
tion on the basis of the position
offsets determined.
Vision Sensor Technology:
Component Vision Module on the 12-Nozzle Revolver Head
Technical Data
Maximum component size 18.7 x 18.7 mm
Recognizable spectrum
of components
0402 to PLCC44 including BGA,
µBGA, Flip Chip, TSOP, QFP, PLCC,
SO to SO32, DRAM
Lead pitch
≥ 0.5 mm
Camera’s field of view 24 x 24 mm
Illumination
Front light
(3 freely programmable planes)
26
Description
The component vision module in-
tegrated into the placement head
performs a critical contribution to
placement accuracy and reliability.
It dependably recognizes all pack-
age forms (= geometric dimen-
sions of the component) illumi-
nated at various angles from three
planes. To illuminate each compo-
nent optimally, the luminosity of
the individual planes can be ad-
justed individually in 256 levels.
Aside from the dimension of the
SMD component, the vision sys-
tem determines the lead number
and pitch (lateral IC lead bend) as
well as the rotation angle and X-/Y-
offset. Components which are not
suitable are rejected and automati-
cally corrected in a repair cycle.
Rotational and X-/Y-offsets are cor-
rected at the turning station of the
revolver head or via the gantry
axes. A relevant X-/Y-pick-up offset
is calculated from the positions of
a number of components from one
track. This is factored in accor-
dance with the self-learning princi-
ple during the subsequent pick-up
of components.
Prior to placement the required
geometrical dimensions of one
component type are entered into
the package form (GF) editor, cre-
ating a synthetic model of the
SMD module. This task is simpli-
fied by the comprehensive on-line
information and Help system.
Later the central SIPLACE vision
system, which all other vision
modules are connected, analyzes
the gray-scale picture of the com-
ponent vision module. To this end,
suitable logarithms are used for
the pertinent package type. Due to
the combination of algorithms, the
vision system also functions relia-
bly under the most difficult condi-
tions, e.g., in the case of different
reflection behavior by the leads or
disruptive influences from the out-
side.
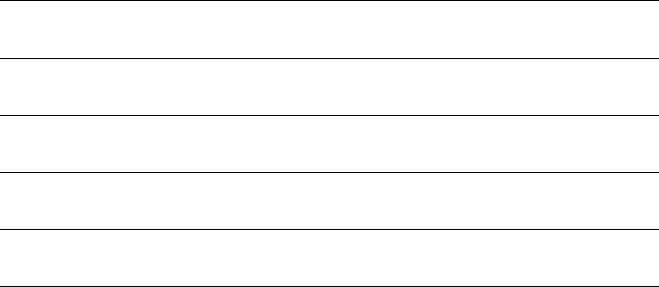
Vision Sensor Technology:
Algorithms to Determine the X-/Y-Position and the
Rotation Angle
Algorithm Component Determined on the basis of
Size Driven Chip
the component’s out line
(profile/gradients)
Row Driven IC
several component leads
(correlation method)
Corner Driven IC
all component leads
(correlation method)
Lead Driven Complex IC
each component connection
(High-Accuracy-Lead-Extraction method)
Grid/Ball
BGA, µBGA,
Flip Chip
all defined balls
(gradients/ball centering)