KE-750_QA表.pdf - 第72页
FUNCTION NAME PWB Transport Sensor Delay Timer Function/Perf ormance CHECK/ADJUSTMENT MET HODS (REMEDIAL ACTION PROCEDURE) Reference Clock ASSURED QUALITY Reliability QUALITY CHARACTERISTI CS (SPECIFIC ATION VALUES) CATE…
MODEL KE-750/760
UNIT Electrical REF. NO.
NAME
EL-4
FUNCTION Z-Axis/θ-Axis Servo Driver
NAME Parameters 8/8
QA Table
Table 8-7-3 Screen Mode 0 (Key input setting) Table 8-8 Screen Mode 1 (Menu input setting)
Page
no.
Abbreviation Name and description Standard
value
Unit Setting
range
Remark Page
no.
Abbreviation Name and description Factory
setting
No. of options
available
Remark
12 Kvp Speed command LPF
- Set the cutoff frequency of the
primary low-pass filter for the
speed command input.
500
Hz 1 to 500
0 TYPE Control mode
- Position control, speed control
Velocit
y
2 Data can be
changed only after
bit 7 of SSW2 of
mode 0 - 11 is set
to "1."
13 ILPF Current command LPF
- Set the cutoff frequency of the
primary low-pass filter for the
current command within the speed
loop.
500 Hz 1 to 500
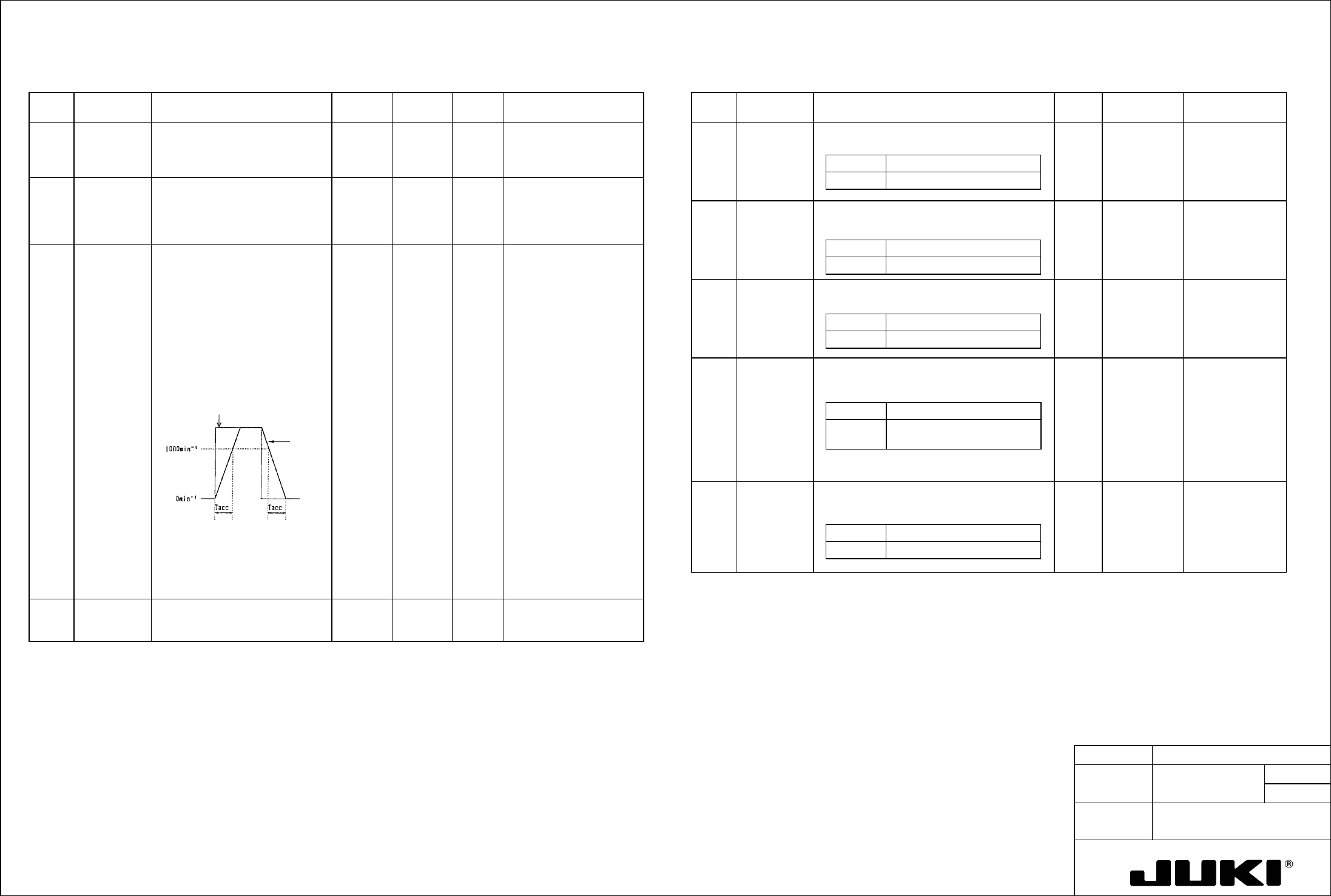
14 Tacc Speed command
acceleration/deceleration time
- Set the acceleration/deceleration
time over a change of 1000min
-1
.
- The speed command in the servo
amplifier is limited to keep
acceleration within the level
determined by this
acceleration/deceleration time
even with sudden changes in the
speed command voltage.
Note:
Set this parameter to "0" if a
position loop is formed outside the
servo amplifier, as an oscillation
could result.
0 x10ms 0 to 250 Data can be set in 10-ms
increments in the range 0
to 2500 ms.
16 Scal Speed scale
Vary the speed command scale of
analog inputs.
2000 mV/
1000min
-1
900 to
6666
Display Description
Velocity Speed control type
1 ENKD Encoder type
- Type of the encoder used
INC. E 1 This parameter
cannot be
changed.
Display Description
2000P/R Wire-saving incremental
2 ENPL No. of encoder pulses
- No. of pulses output by the encoder used
2000P/
R
1 This parameter
cannot be
changed.
Display Description
2000P/R 2000 pulses per revolution
3 MOT. Motor type
- Motor used (under a particular series)
Example:
$$$$: Depends the factory-set specifications.
$$$$ P30, P50
Under series
(by amplifier
capacity)
Data can be
changed only after
bit 7 of SSW2 of
mode 0 - 11 is set
to "1."
Display Description
2000P/R 50-W motor under P30 series
is selected.
Speed command
voltage
Internal speed
command
4 CABLE Applicable cable length
- Length of cable between motor and amplifier:
0 to 5 m, 5 to 10 m, 10 to 15 m, 15 to 20 m
0 -- 5m 4 Data can be
changed only after
bit 7 of SSW2 of
mode 0 - 11 is set
to "1."
Display Description
0 - - 5m Wiring length: Less than 5 m
FUNCTION NAME PWB Transport Sensor Delay Timer Function/Performance CHECK/ADJUSTMENT METHODS (REMEDIAL ACTION PROCEDURE)
Reference Clock
ASSURED QUALITY Reliability
QUALITY CHARACTERISTICS (SPECIFICATION VALUES) CATEGORY Safety
Product Image
ROLE IN FUNCTION (MEANING OF SPECIFICATION VALUES)
POSSIBLE MALFUNCTIONS (CAUSED BY INCORRECT SPECIFICATION VALUES)
COMPONENTS
NO. Part No. Part Name Associated Quality Characteristics
1 E86177210A0 Carry board assembly
2
3 MODEL KE-750/760
4 UNIT Electrical REF. NO.
5
NAME
EL-5
6 FUNCTION PWB Transport Sensor Delay
7
NAME Timer Reference Clock
8
9
10
QA Table
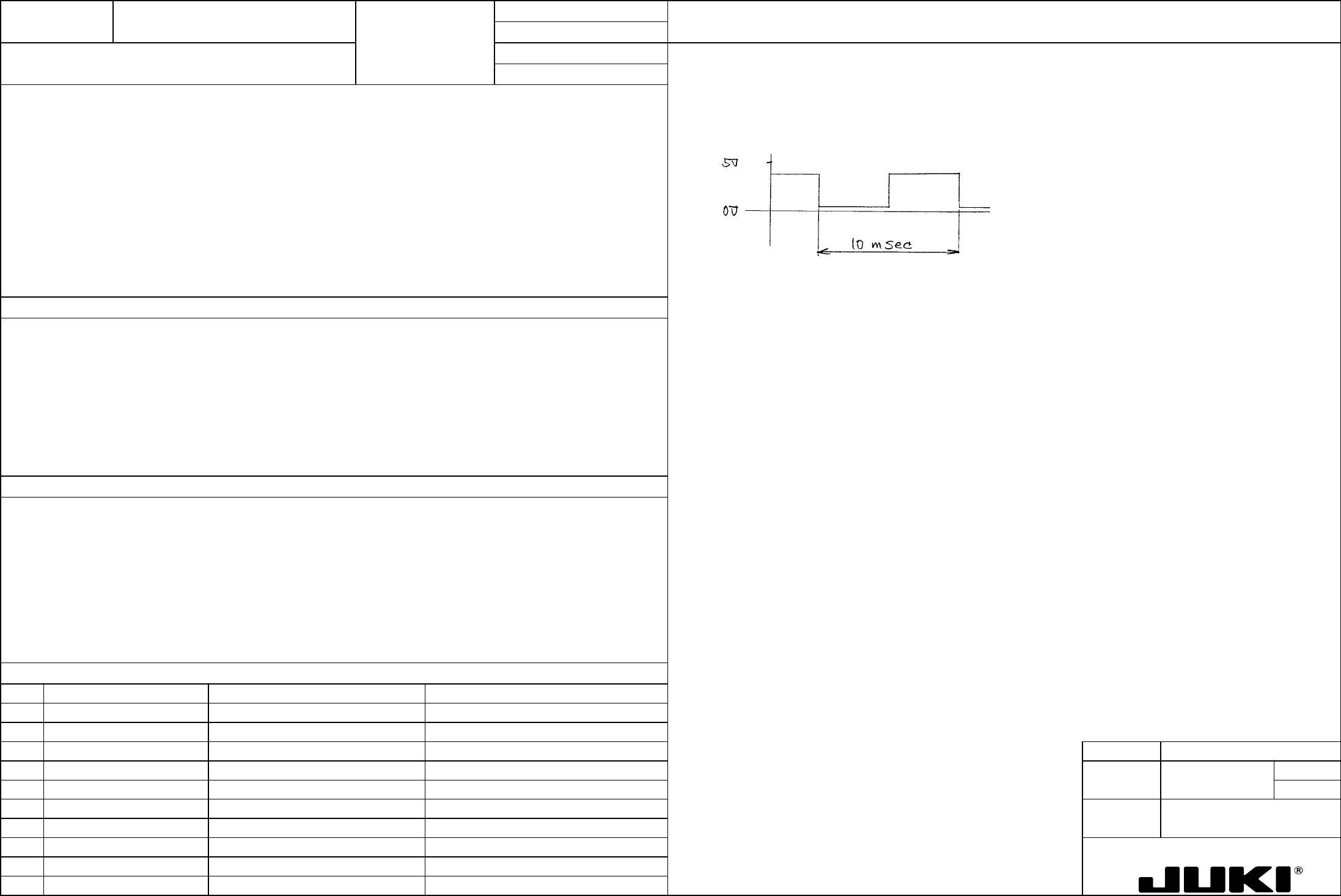
1. With check pin TP9 as GND, observe TP1 with an oscilloscope.
Reference clock frequency: 10 msec. ±0.5 msec.
Turn variable resistor VR1 as necessary so that the TP1 signal becomes 10 msec. ±0.5 msec. as shown below.
2. Flip only SW2 of SW1 to 5 of the DIP switch to ON.
Directly concerned with the off delay time of the PWB detection sensor, it affects transport operation for PWBs with slits.
1. PWB transport error
FUNCTION NAME Transport Stepping Motor Drive Current Function/Performance CHECK/ADJUSTMENT METHODS (REMEDIAL ACTION PROCEDURE)
ASSURED QUALITY Reliability
QUALITY CHARACTERISTICS (SPECIFICATION VALUES) CATEGORY Safety
Product Image
ROLE IN FUNCTION (MEANING OF SPECIFICATION VALUES)
POSSIBLE MALFUNCTIONS (CAUSED BY INCORRECT SPECIFICATION VALUES)
COMPONENTS
NO. Part No. Part Name Associated Quality Characteristics
1 HM001320000 Five-phase stepper driver DC power source output voltage adjustment
2
3 MODEL KE-750/760
4 UNIT Electrical REF. NO.
5
NAME
EL-6
6 FUNCTION Transport Stepping Motor Drive
7
NAME Current 1/2
8
9
10
QA Table
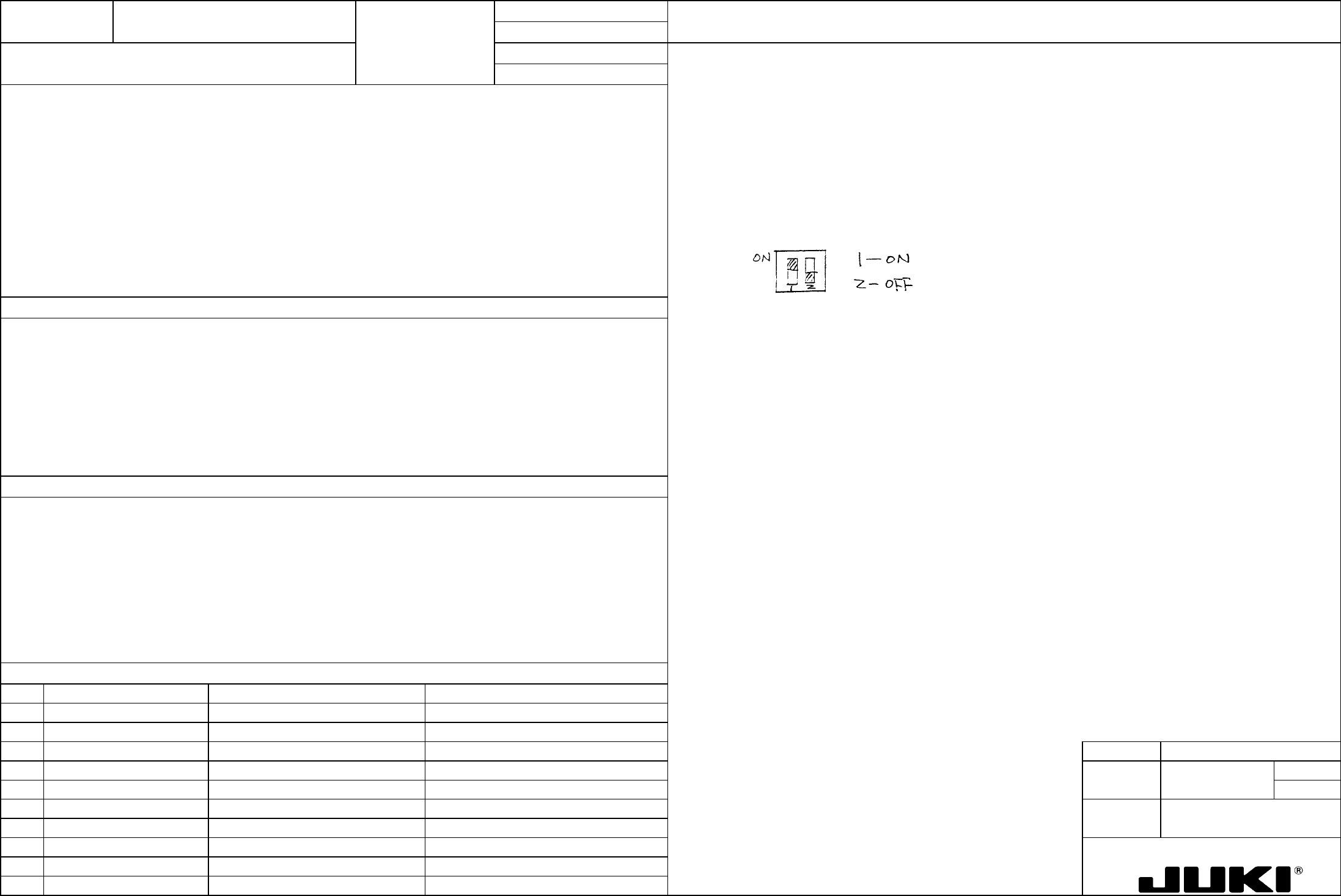
1. Before starting the adjustment procedure, make sure that the DC power source output voltage has been properly adjusted.
Drive current: 1.4 A ±0.005 A/phase
2. Turn the transport stepping motor and measure the voltage across [CP1]+ and [CP2]- on the five-phase stepper driver
with a digital voltmeter.
3. Slowly turn the RUN variable resistor so that the voltage across [CP1]+ and [CP2]- becomes 2.8 V ±0.01 V.
4. Flip the DIP switch keys as follows.
Directly concerned with the rotating torque of the transport stepping motor (centering buffer).
1. Stepping motor out of correct timing, resulting in a transport error.
2. Stepping motor temperature running abnormally high