KE-2050_MS参数 - 第35页
Rev.2.00 MS 参数 4-2 激光高度取得从各贴装头的 Z 轴原点位置到激光传感器的高度的尺寸 。 后导向器 减速传感器 ON领域 变换器 Z相 信 号 Z 轴原点位置 Z轴 马 达 Θ轴马达 激光高度 激光测定高度 Z轴 滑 动 轴 激光传感器 球螺丝 传感器配件 减速 传感器 减速传感器 OFF领 域
Rev.2.00
MS 参数
4-1
4. 偏差设定
4-1. 激光偏差
4-1.1. 激光偏差
4-1-1-1.功能
激光偏差取得机板上面高度、激光高度、吸嘴转动中心以及角度偏差。
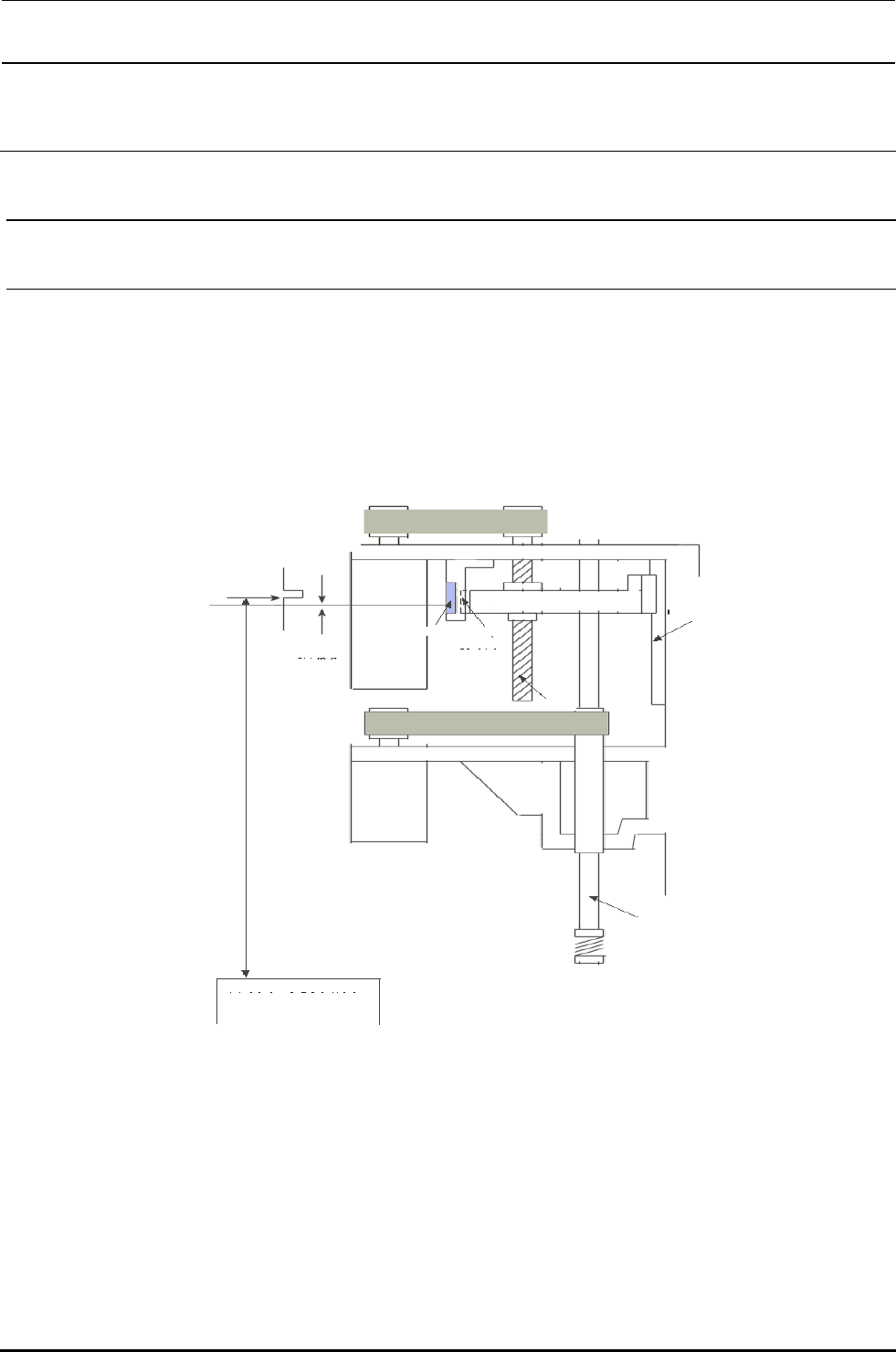
机板的上面高度取得从校准部上面到各贴装头的 Z 轴原点位置的尺寸。
另外,Z 轴的原点位置未 Z 轴减速传感器 ON 之后到最初被检测的 Z 轴马达变换器的 Z 相的位置。
后导向器
减速传感器
ON领域
变换器
Z相信号
Z轴原点位置
减速传感器
OFF领域
球螺丝
减速传感器
传感器配件
Z轴马达
Θ轴马达
基板上面高度
Z轴滑动轴
校 准 部
Rev.2.00
MS 参数
4-2
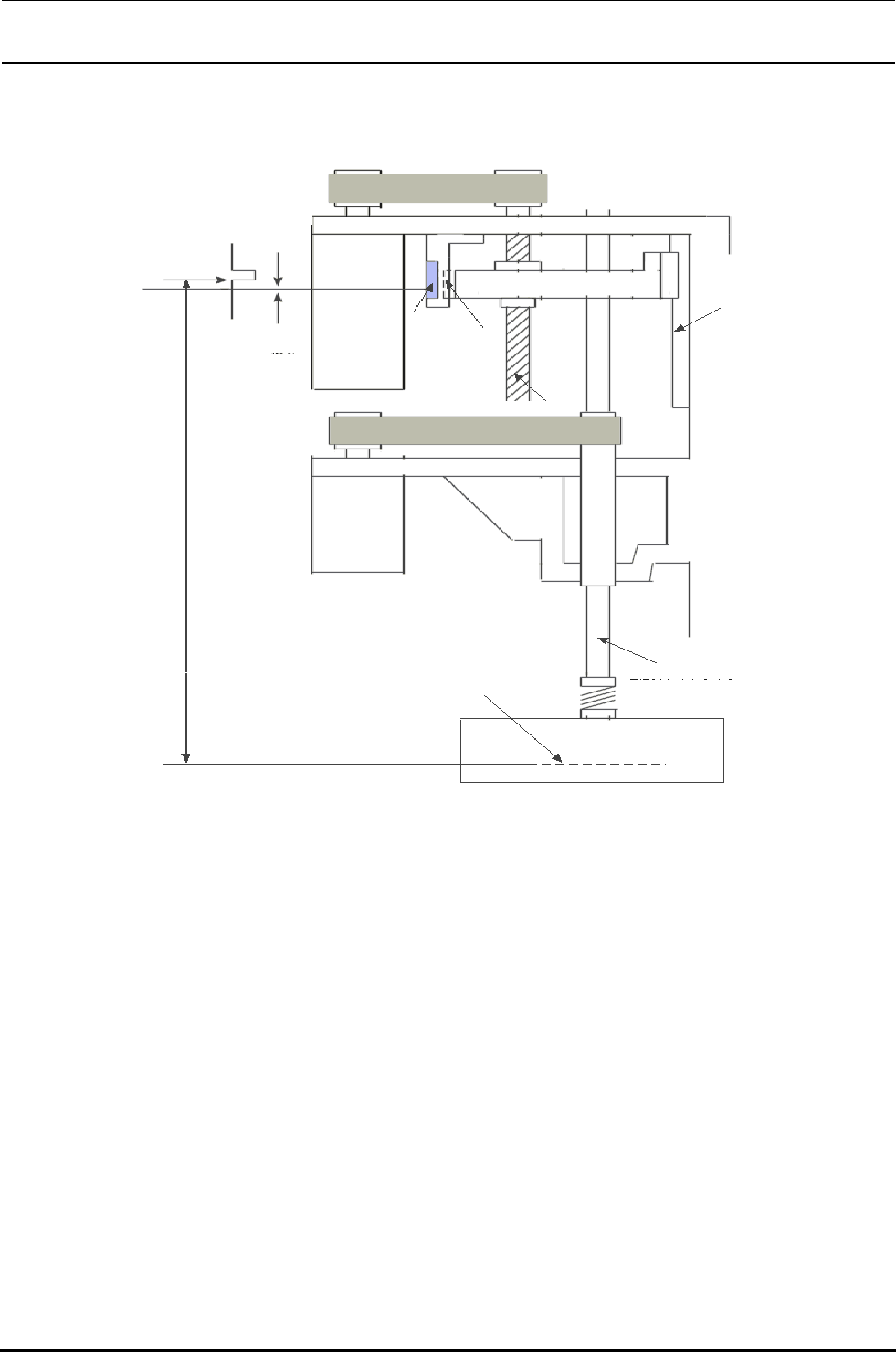
激光高度取得从各贴装头的 Z 轴原点位置到激光传感器的高度的尺寸。
后导向器
减速传感器
ON领域
变换器
Z相信号
Z轴原点位置
Z轴马达
Θ轴马达
激光高度
激光测定高度
Z轴滑动轴
激光传感器
球螺丝
传感器配件
减速
传感器
减速传感器
OFF领域
Rev.2.00
MS 参数
4-3
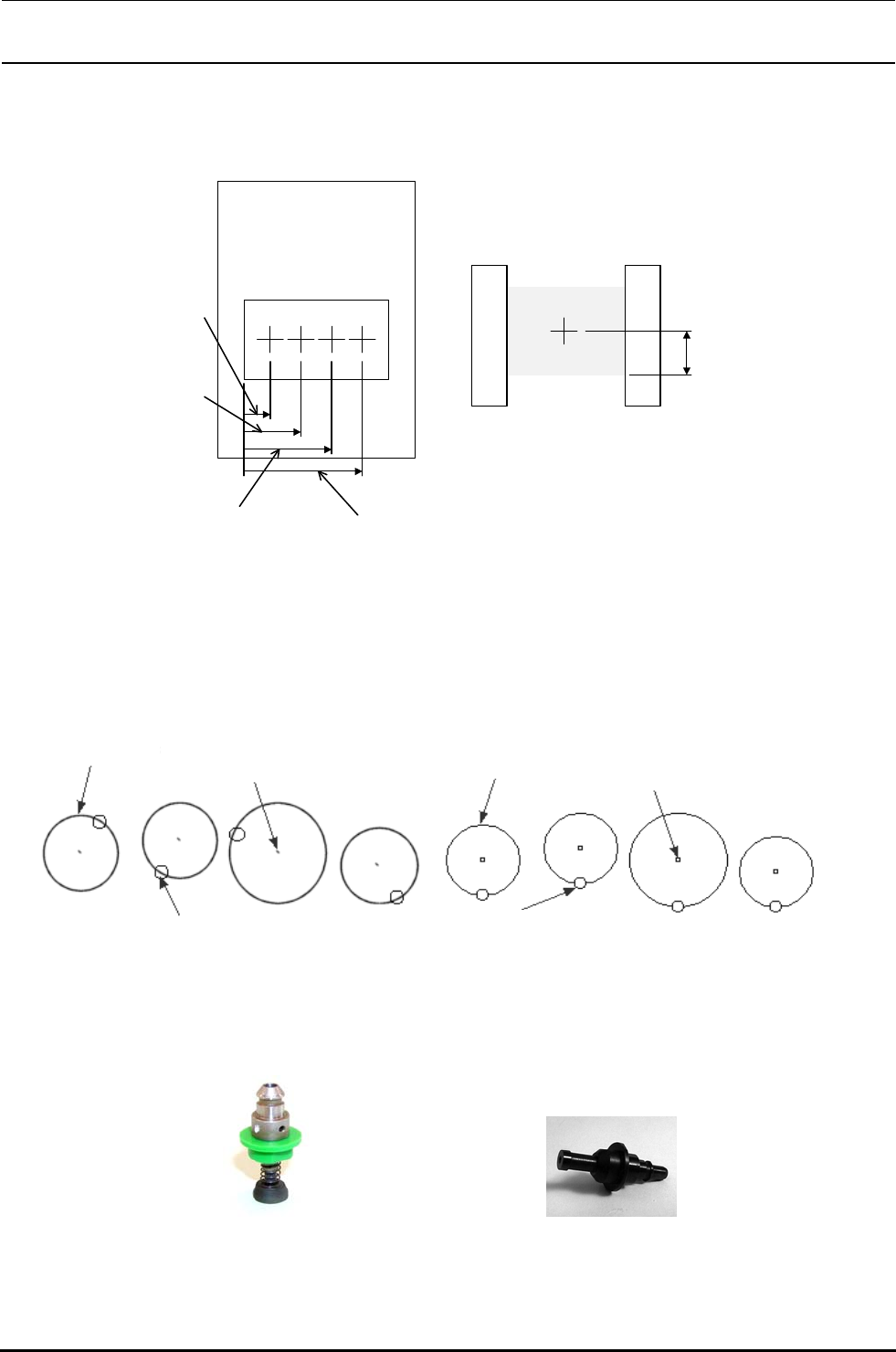
取得吸嘴旋转中心、各贴装头的轴旋转中心位置离激光传感器的偏离位置。
MNLA
贴装头
吸嘴旋转中心
(L2)
吸嘴旋转中心
(L1)
吸最旋转中心
吸嘴旋转中心
(L4)
吸嘴旋转中心
(L3)
角度偏差因为要在轴转动方向调整所有的吸嘴,因此从轴的临时原点(把被轴削的平面转到前侧的位置)
来取得角度。
取得角度偏差之后,可以让各贴装头转动的偏斜朝向同一方向,可以提高同时吸附的精度。
轴的转动轨迹
轴的转动中心
临时原点时的轴位置
轴位置
轴的转动中心
轴的转动轨迹
<取得角度偏差前的原点复位后情况> <取得角度偏差后的原点复位情况>
4-1-1-2.使用夹具
・508 吸嘴(40001346) ・夹具吸嘴(E2101998000)
FMLA 贴装头