KE-2050_MS参数 - 第47页
Rev.2.00 MS 参数 4-14 外得尘埃时,请擦干净摄像机调节夹具,可以看清标记 。 测定时,如果检测到标记以外的东西就不能取得正确的值,或成为异常 。 选择了确认之后,测定 X 方向的标记间的距离 。 测定完毕,显示出测定结果,用输入值和测定结果计算 新的 X 方向的缩放 。 < 操作 ・3/10> 准备完毕,请选择确认 。 选择确认之后,把辅助 OCC 移动到 Y 轴 缩放位置 。 < 操作 ・4/10> 与 X 轴时相同,…
Rev.2.00
MS 参数
4-13
4-2.3. 辅助OCC偏差
4-2-3-1.功能
辅助 OCC 缩放、组装角度和 OCC 取得安装位置。
辅助 OCC 安装在 KE2060/2055R/2060R。
4-2-3-2.使用夹具
・摄像机调节夹具(E2106998000)
・白纸
60mm 正方在中央有直径 2mm 左右的小孔的白纸
4-2-3-3.操作
选择[偏差设定(O
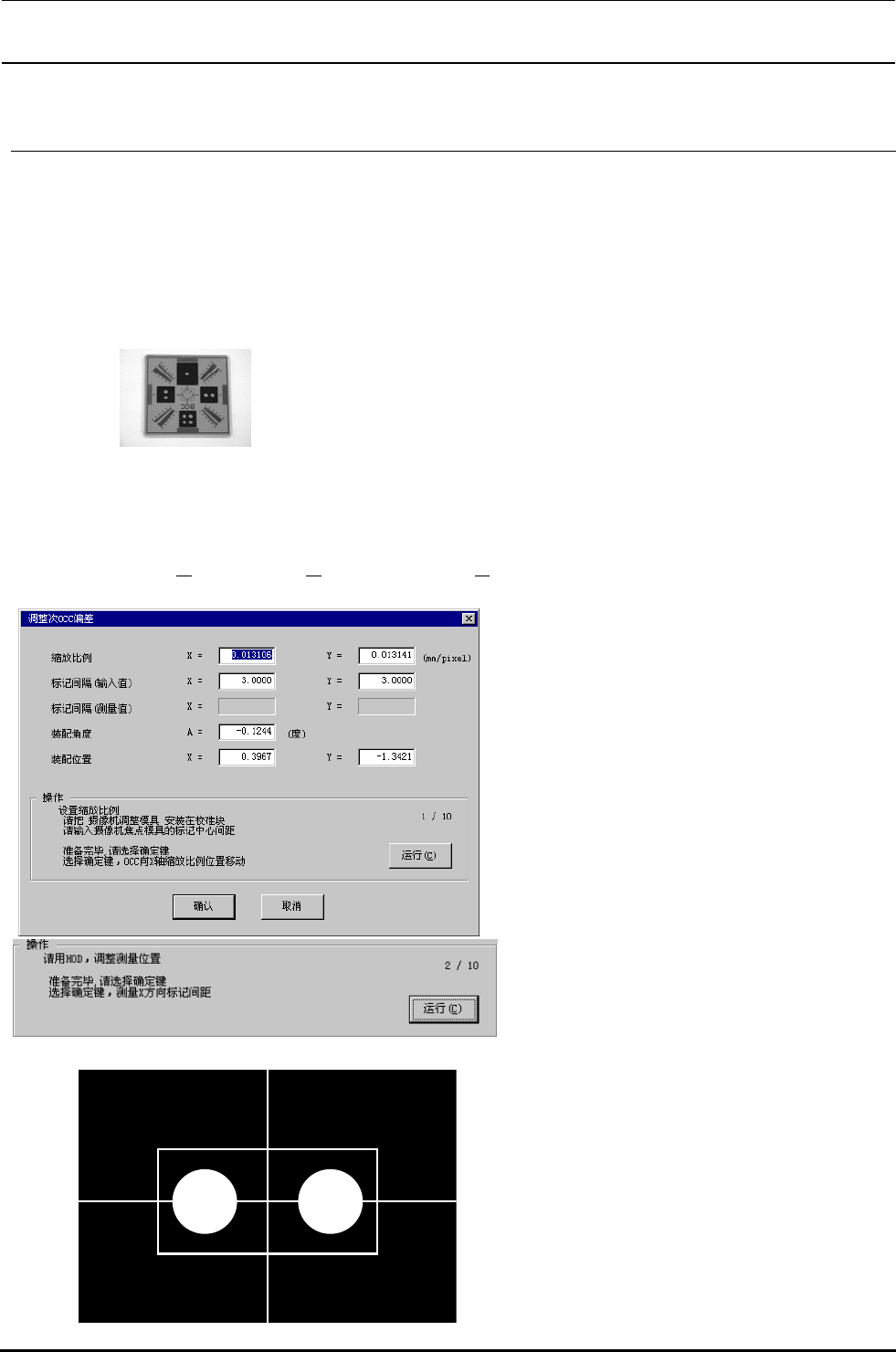
)][OCC偏差(O)][辅助OCC偏差(S)...]之后,下面的辅助 OCC 偏差设定画面显示出
来。
<操作・1/10>
把白纸放到 CAL 部。
然后,把摄像机调节夹具放到上面。此时,
把摄像机调节夹具的中心移动到 CAL 部
的中心。
摄像机调节夹具有表面背面。把蒸着面
(图案能清楚地看见的面)朝下。另外,把
在摄像机调节夹具描绘的“BOC”的文字
调整到 XY 坐标系的 Y 负侧。
输入摄像机调节夹具的 X 和 Y 方向的标记
见的距离(3mm)。
准备完毕,请选择确认。
选择了确认之后,辅助 OCC 移动到 X 轴
缩放位置。
<操作・2/10>
把摄像机滤光镜设暗(设定为存储器 0~
1)调整得看清下图得标记。
用演示把监视器的十字游标调整到 2 个标
记的中央,然后按 HOD 确认键。
不需要调整时,则不需要演示。
此时,在摄像机视野内可以看得见标记以
Rev.2.00
MS 参数
4-14
外得尘埃时,请擦干净摄像机调节夹具,可以看清标记。
测定时,如果检测到标记以外的东西就不能取得正确的值,或成为异常。
选择了确认之后,测定 X 方向的标记间的距离。测定完毕,显示出测定结果,用输入值和测定结果计算
新的 X 方向的缩放。
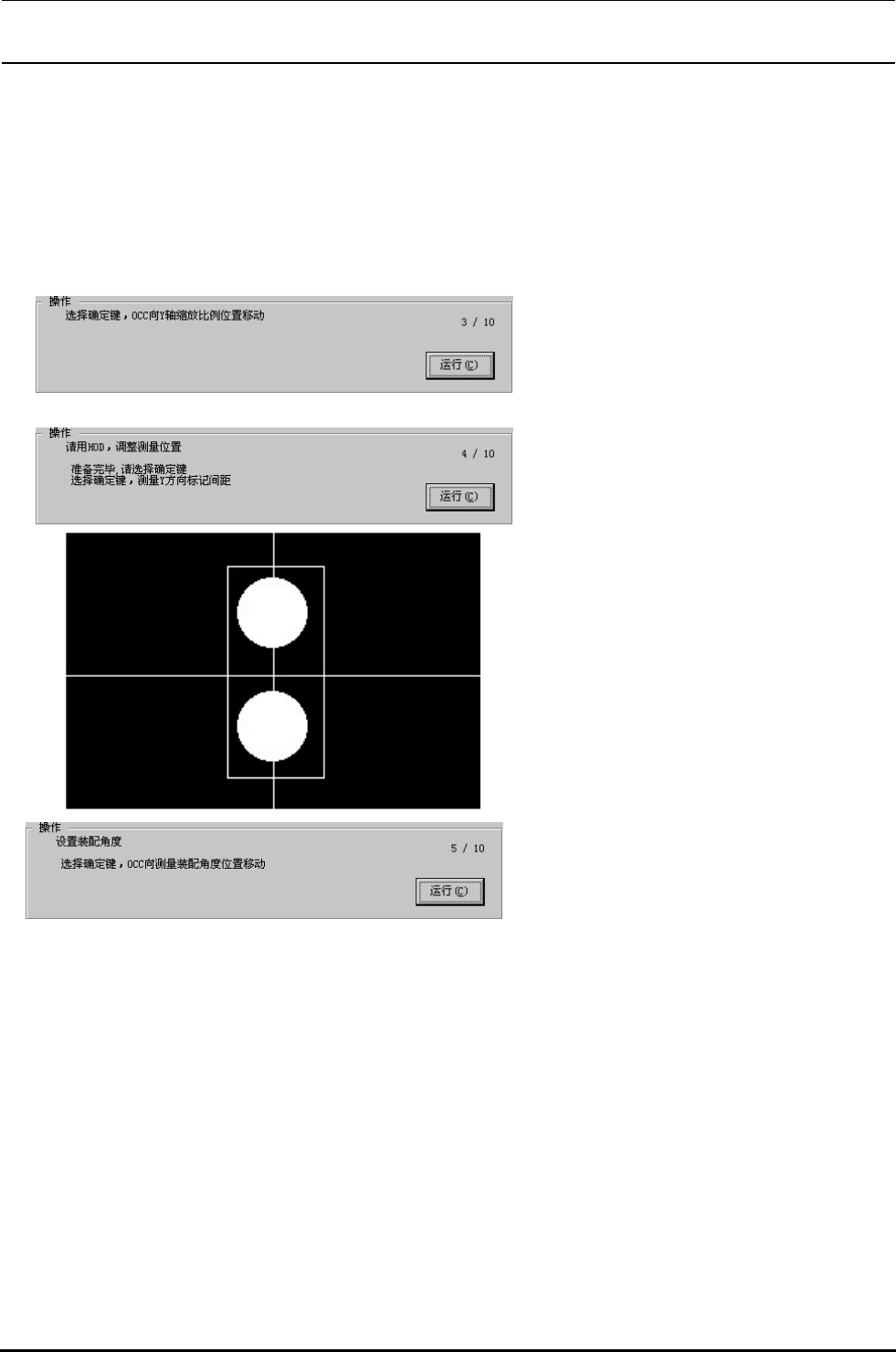
<操作・3/10>
准备完毕,请选择确认。
选择确认之后,把辅助 OCC 移动到 Y 轴
缩放位置。
<操作・4/10>
与 X 轴时相同,调整测定位置。
准备完毕,请选择确认。
选择确认之后,用辅助 OCC 测定 Y 方向
的标记间的距离。
测定完毕之后,显示测定结果,用输入值
和测定结果计算新的 Y 方向的缩放比例。
<操作・5/10>
准备完毕,请选择确认。
选择确认之后,辅助 OCC 移动到安装角
度测定位置。
Rev.2.00
MS 参数
4-15
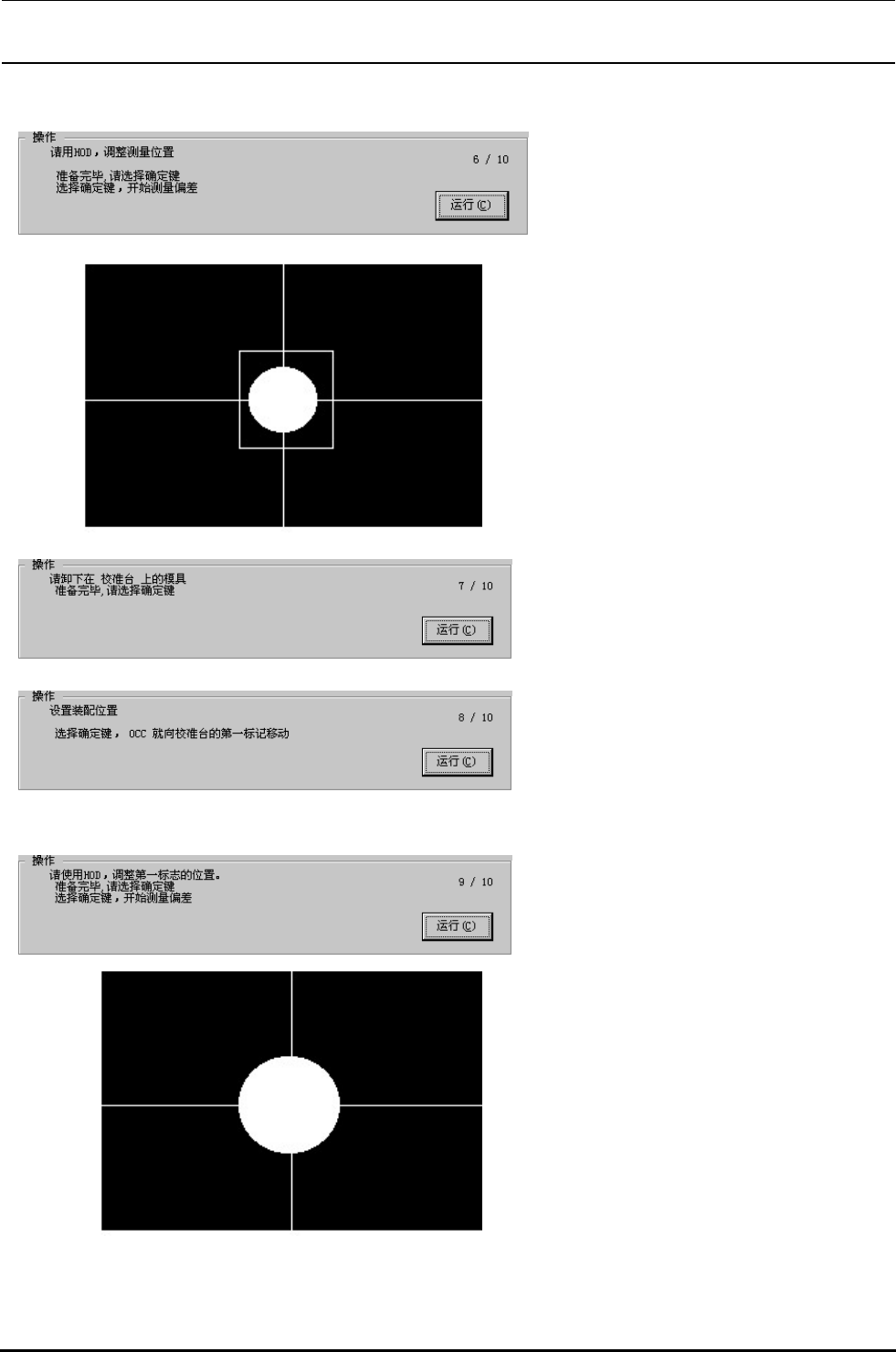
<操作・6/10>
用演示,把监视器的十字游标调整到标记
中心,然后按 HOD 确认键。
此时,在摄像机视野内可以看得见标记以
外得尘埃时,请擦干净摄像机调节夹具,
可以看清标记。
测定时,如果检测到标记以外的东西就不
能取得正确的值,或成为异常。
准备完毕,选择确认。
选择了确认之后,测定组装角度。
测定完毕,用识别结果计算新的组装角
度。
<操作・7/10>
请从 CAL 部卸下摄像机调节夹具。
准备完毕,请选择确认。
<操作・8/10>
准备完毕,请选择确认。
选择确认之后,辅助 OCC 移动到 CAL 部
第 1 标记上。
<操作・9/10>
用演示,把监视器的十字游标调整到标记
的中心,然后按 HOD 确认键。
准备完毕,请选择确认。
选择了确认之后,用辅助 OCC 识别 CAL
部的第 1 标记位置,测定组装位置。
测定完毕,用识别结果计算出新的组装安
装位置。