DECAN_S2_Admin(Chi_Ver4.5) - 第386页
14-28 Advanced Chip Shooter DECAN S2 Administrator’s G ui de <Get> 按钮 选定的 Fiducial Mark 位置上 应用当前位置的坐标值。 <Light> 按钮 设置照明值。 调整相应的滑条设置值。 < 更新 > 按钮 储存所有修改值后关闭画面。 <Scale T each...> 领域 示教输送机的基准标…
14-27
Machine Calibration
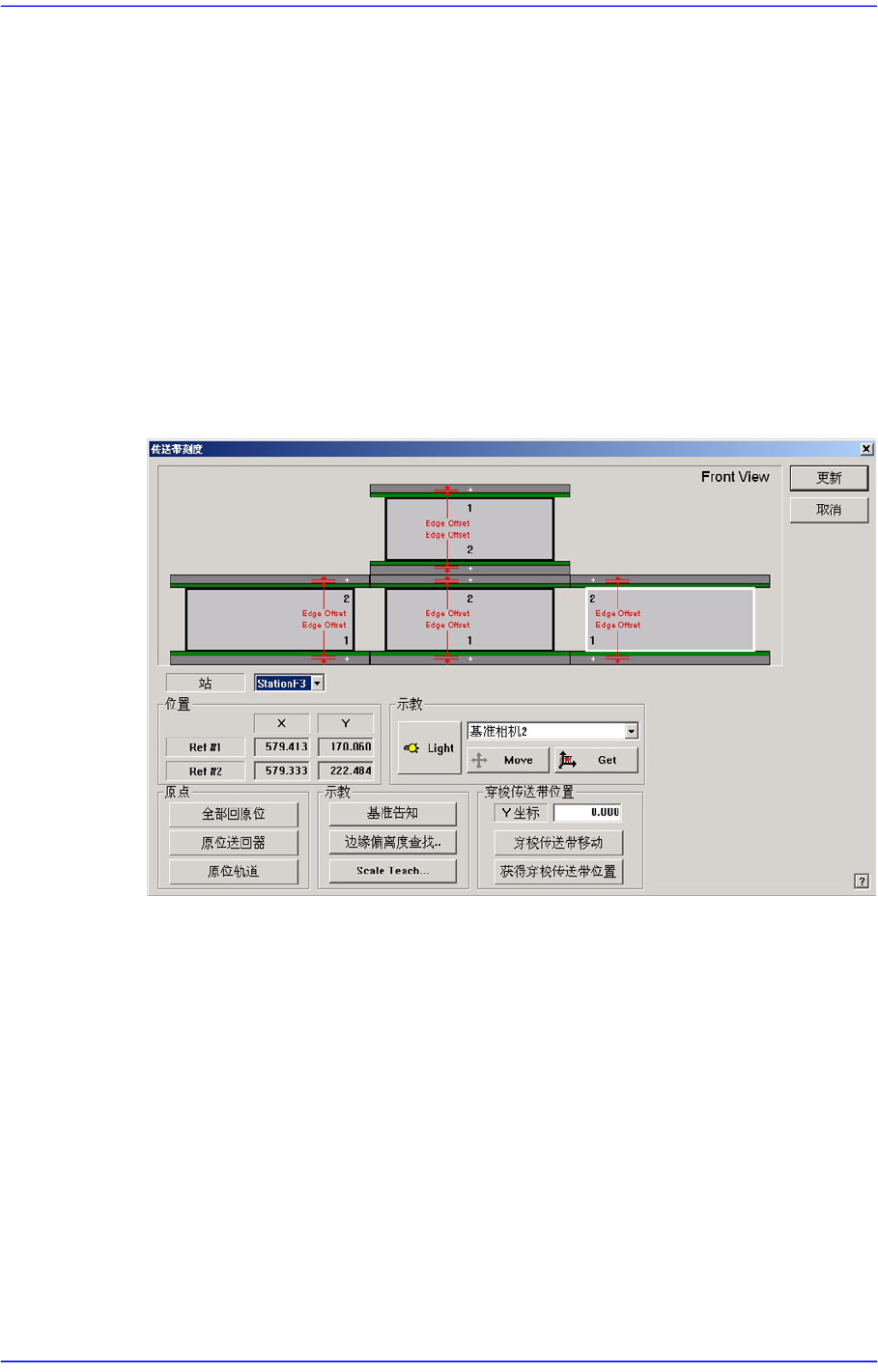
<Get> 按钮
选定的Fiducial Mark位置上应用当前位置的坐标值。
<基准告知>按钮,
为了激活此按钮应该先点击<全部回原位>按钮。
正确示教被选Station的各Fiducial Mark。 详细事项请参照 “6.3
基准符号
(Fiducial Mark)
设定
“。
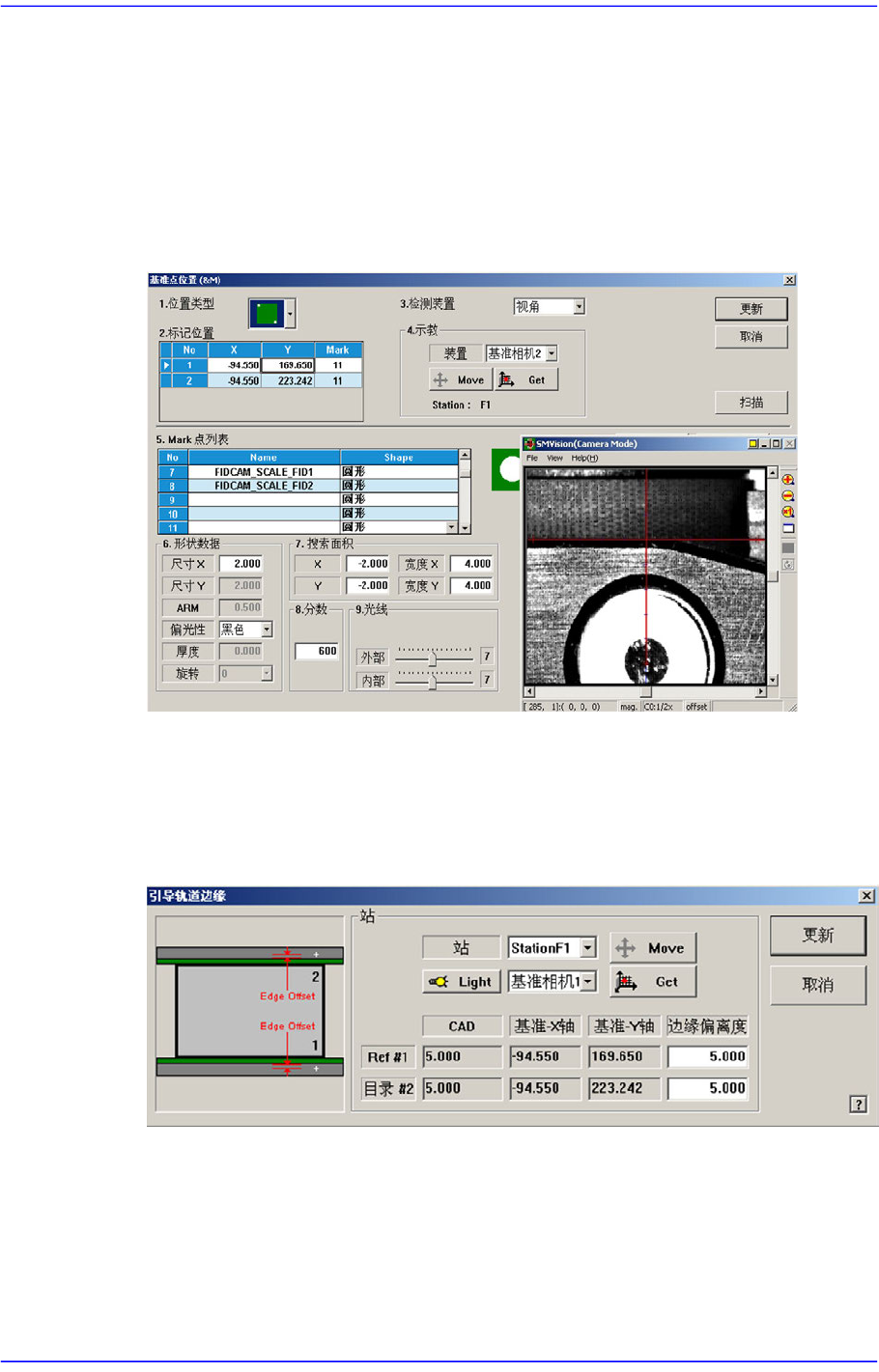
<边缘偏离度查找..>按钮
正确测量Fiducial Mark和 Edge之间的Offse时使用。为了测量Edge Offset首先要
点击<全部回原位>按钮确认Fiducial Mark的位置。
图
14.10 “Teach Rails Edges”
对话框
<边缘偏离度> 编辑框
是指Fiducial Mark中心到Rail末端(Edge)的距离,用鼠标选择此处,执行校
准。
<Move> 按钮
基准相机移动到现在选定的Station所选Fiducial Mark位置。
14-28
Advanced Chip Shooter DECAN S2 Administrator’s Guide
<Get> 按钮
选定的Fiducial Mark位置上应用当前位置的坐标值。
<Light> 按钮
设置照明值。调整相应的滑条设置值。
<更新> 按钮
储存所有修改值后关闭画面。
<Scale Teach...>领域
示教输送机的基准标记Y Offset。
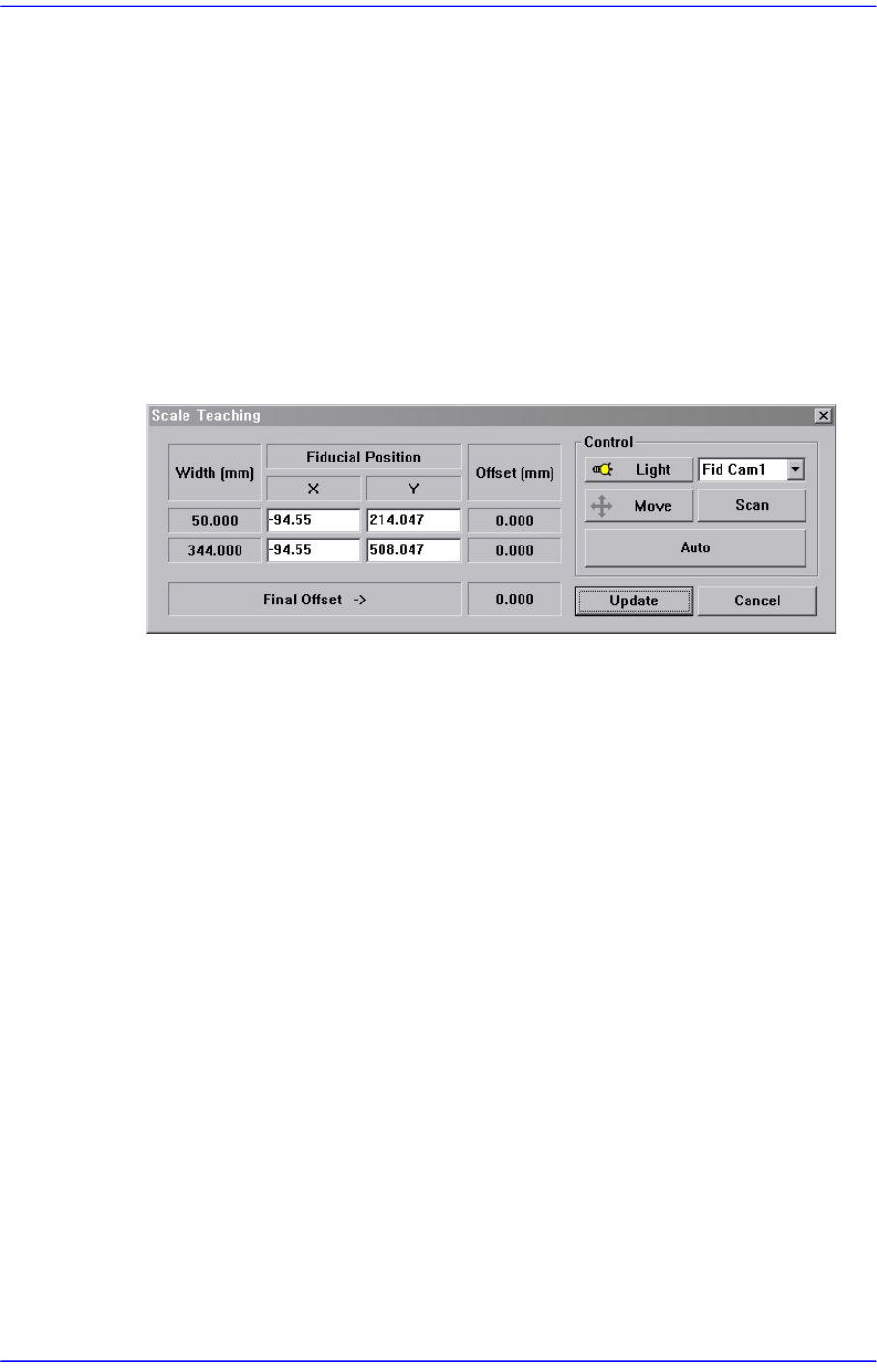
图
14.11 "Scale Teach..."
对话框
<Width (mm)> 领域
显示出为了Calibration而基本提供的输送机宽度。
<Fiducial Position> 领域
显示出MMI所设置的输送机基准标记的XY坐标。
<Offset (mm)> 领域
显示出实际设备所测量的输送机的基准标记Y值与MMI所设置的Y值的
Offset。
<Final Offset ->> 领域
A: 输送机宽度为50mm时的Y偏移量。
B: 输送机宽度为344mm时的Y偏移量。
Final Offset = B-A
<Move> Button
把Fiducial Camera移动到<Fiducial Position> 领域所选择的输送机的位置。
<Scan>按钮
扫描 <Fiducial Position> 所选择的输送机的基准标记后,在 <Offset (mm)> 领
域显示Y Offset。
<Auto> 按钮
14-29
Machine Calibration
自动实行输送机的基准标记Y Offset示教过程。
<Light> 按钮
设置照明值。可以调节相应滑动条地设置该值。
<Update> 按钮
反映了变更值后关闭对话框。.
<Shuttle Index Pos>领域
下面设备的输送机固定轨道的位置和Exit Shuttle的Index Position不一致时,提
供可调节Exit Shuttle的Index Position功能。
设备启动后,对输送机的轨道执行‘Home’才能激活本功能。
图
14.12 "Conveyor Calibration-Shuttle Index Pos "
对话框
<位置Y>编辑框
对当前Exit Shuttle的Index Position坐标。
<移动输送路>按钮
Shuttle移动到<Pos Y>中输入的位置。但,如果是后面轨道固定的设备,则
移动到减去当前轨道宽度的位置。
<Shuttle Get>按钮
把当前Shuttle的位置设定为Machine坐标。利用示教框的Jog功能移动Exit
Shuttle,使之与下面设备的固定轨道保持一致后点击此按钮在<Pos Y>编辑
框中输入Shuttle Index Position坐标。
如果是后面轨道固定的设备,与下面设备的输送机宽度相同地调节输送机宽
度,再利用示教框的Jog功能把Exit Shuttle移动到可进行两设备间PCB移送