DECAN_S2_Admin(Chi_Ver4.5) - 第433页
14-75 Machine Calibration 2. 选择需要校准的悬臂。 3. 示教工具选择 Fid Cam2( 或 F id Cam4) 后, 利 用示教框 (jo g box) 把 X- Y 轴移动到 可以识别位置的领域 ( 可以利用 SMV ision 判别的地点 ) 。 4. 单击 <Get> 键, 把当前位置保存到 <T eaching Position> 。 5. 示教工具选择 Beam1( 或…
14-74
Advanced Chip Shooter DECAN S2 Administrator’s Guide
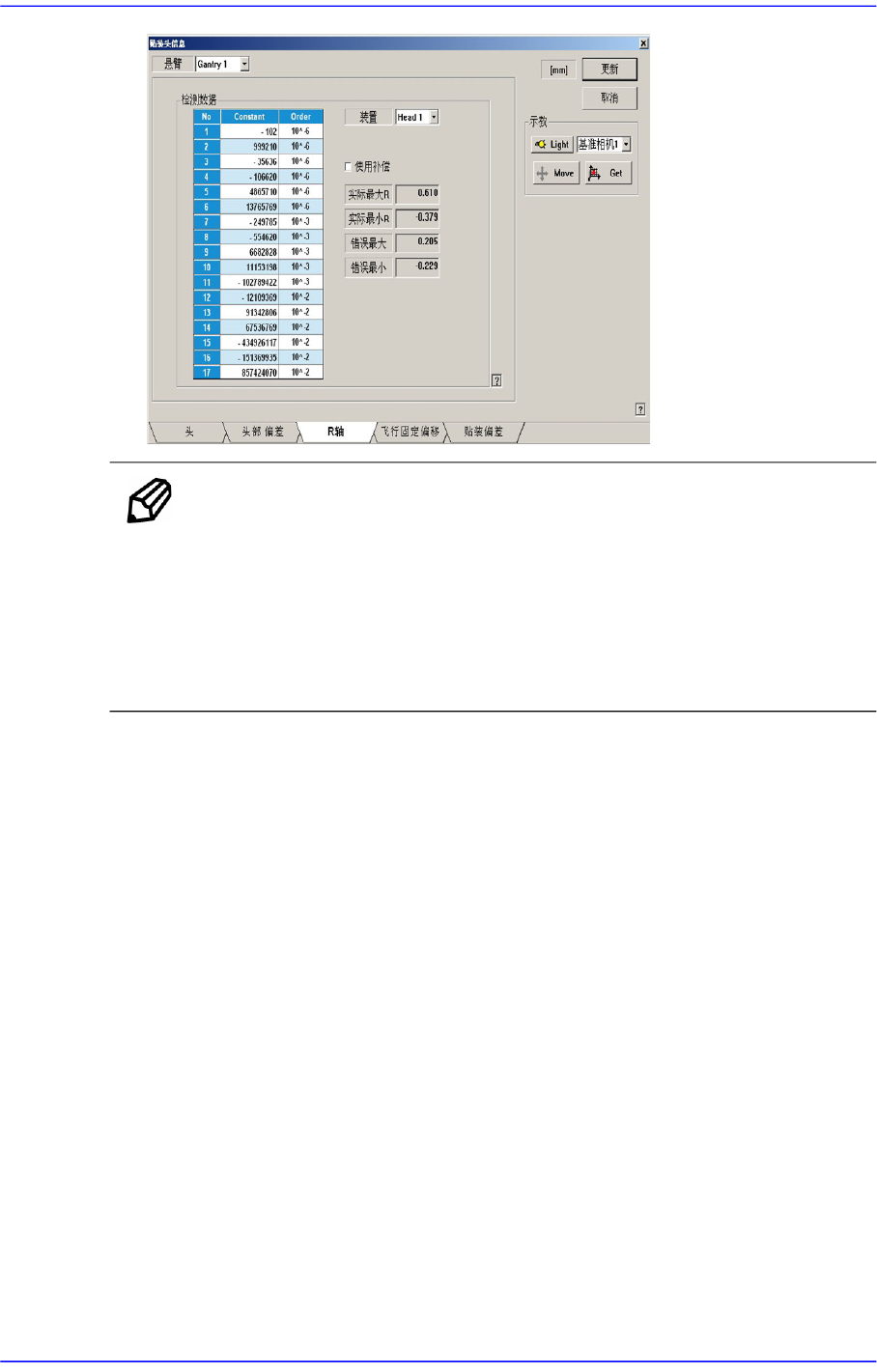
备 注 R-轴偏移的校正基准值如下。
Real Max(Min): 命令值与测定值之间的最大(最小)误差
Head1~Head10 : -1.0 ~ 1.0(deg)
Err Max(Min) : 测定值与补偿值之间的最大(最小)误差
Head1~Head10 : -0.3 ~ 0.3(deg)
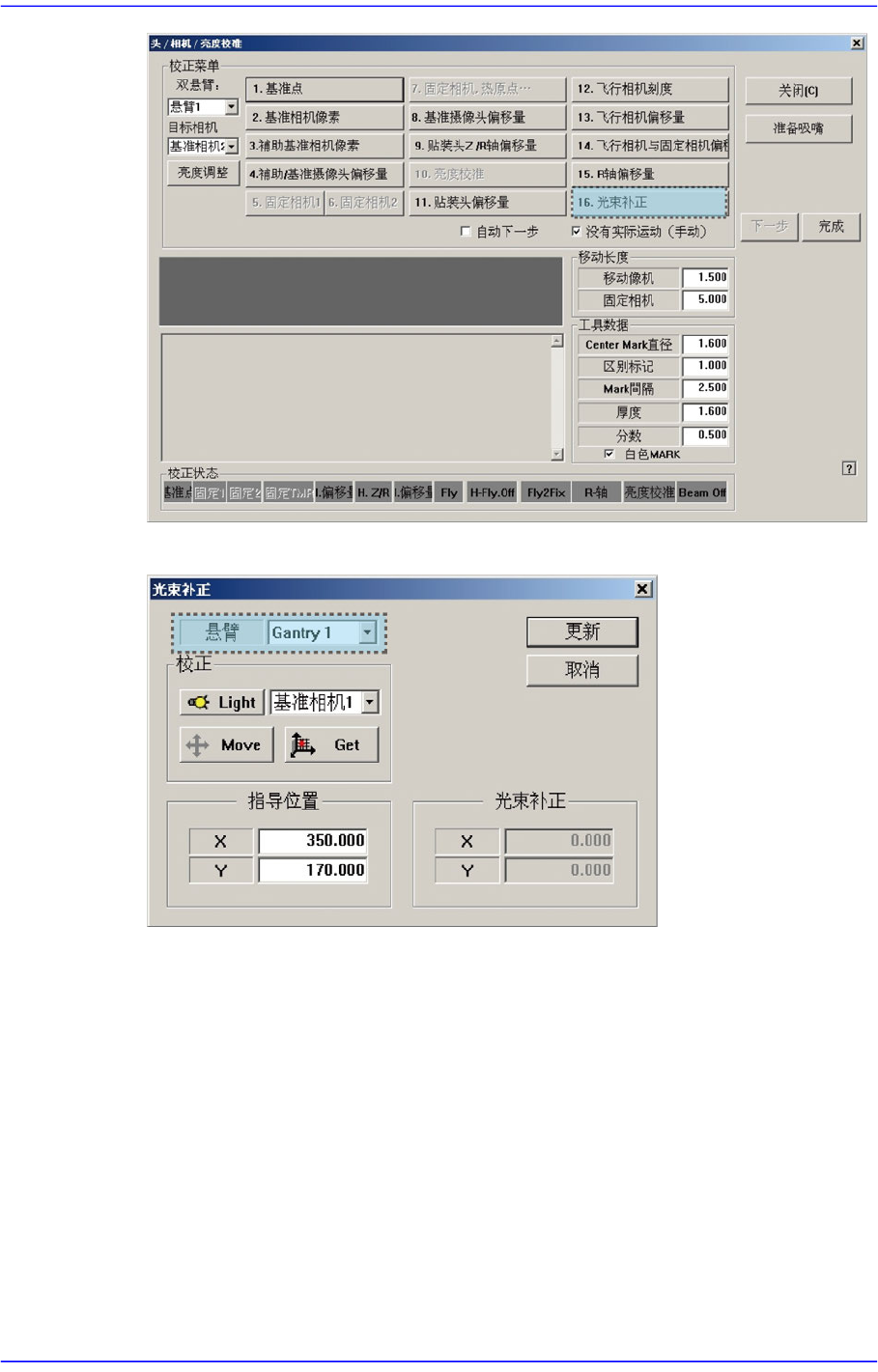
14.3.10.9. Beam Offset Calibration
该校准作业测量基准相机(Fiducial Camera)中心与悬臂的Beam Sensor之间的距离。
需要测量Beam Offset时,先在系统菜单的<Head>选项卡选择需要使用的Beam
Sensor。
下面是Beam Offset的校准过程。
1. 单击<16. Beam Offset>键,实行Beam Offset对话框。
14-75
Machine Calibration
2. 选择需要校准的悬臂。
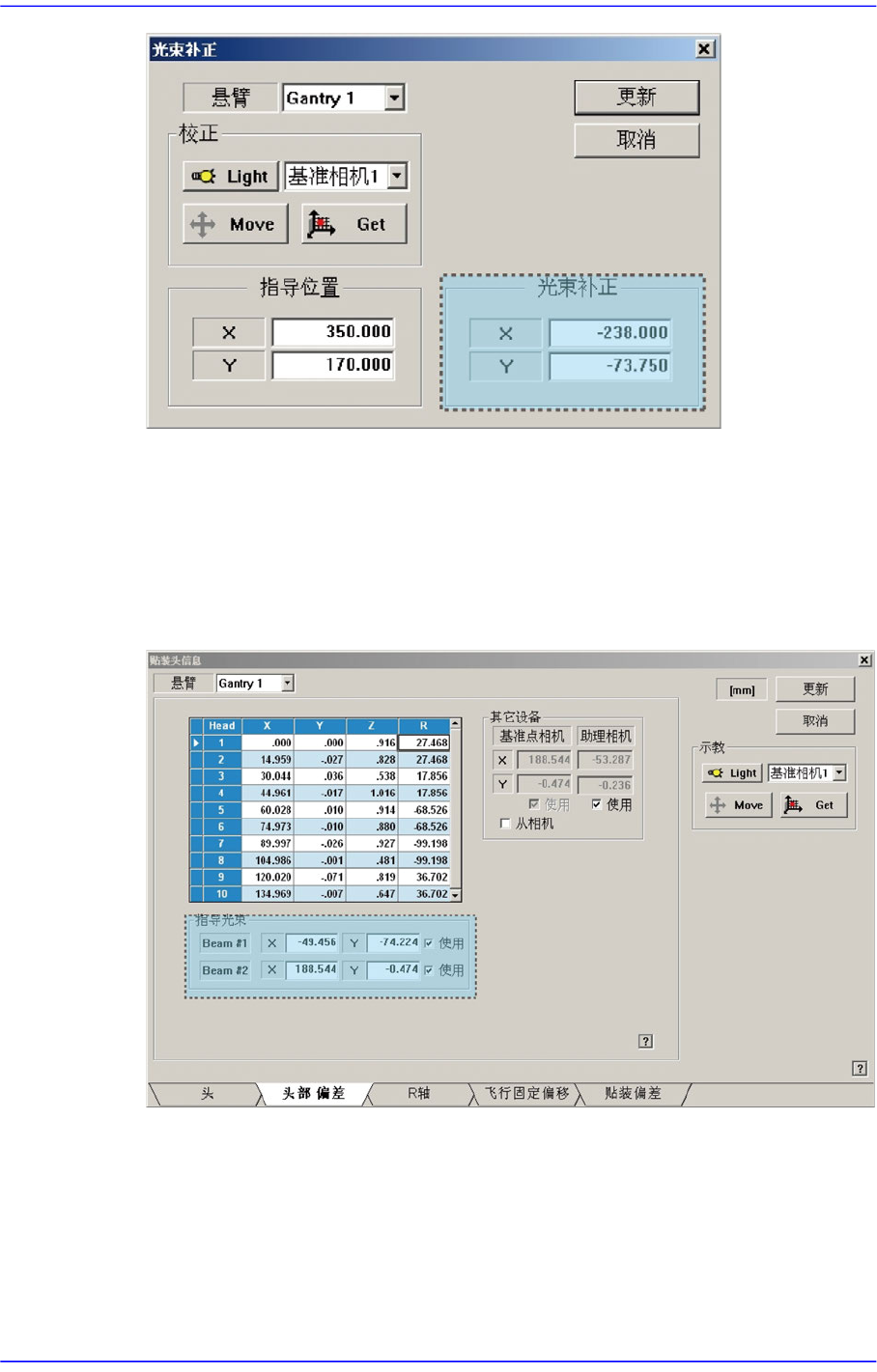
3. 示教工具选择Fid Cam2(或Fid Cam4)后,利用示教框(jog box)把X-Y轴移动到
可以识别位置的领域(可以利用SMVision判别的地点)。
4. 单击<Get>键,把当前位置保存到<Teaching Position>。
5. 示教工具选择Beam1(或Beam2),然后利用示教框(jog box)移动到<Teaching
Position>位置。
6. 单击<Get>键,把当前位置保存到<Beam Position>。
14-76
Advanced Chip Shooter DECAN S2 Administrator’s Guide
7. 在<Gantry>组合框选择Gantry2后,按照和Gantry1相同的方式实行校准。
8. 单击<Update>键保存设定值。
9. 结果值可以在System Setup菜单的Head Offset对话框查看。
10. 在<Gantry>组合框选择Gantry2后,按照和 Gantry1相同的方式实行校准。
结果值可以在System Setup菜单的R Axis对话框查看。