DECAN_S2_Admin(Chi_Ver4.5) - 第99页
4-21 Tools 简化操作 (shortcut) 菜单 后面喂料器座 (2): 指定后置工序的喂料器组的原点为基准原点。 状态表示领域 显示手动操作时发生的信息。 <Park Fro nt > 按钮 与前 ANC 社区 接待龙门, 龙门背面移动到附近的 Y2+ 极限位置。 <Park Rear> 按 钮 接待龙门后龙门附近的 ANC 附近 的 Y1+ 极限位置, 并将其移动到后面。 <A…
4-20
Advanced Chip Shooter DECAN S2 Administrator’s Guide
<头部装置> 组合框
利用<轴>组合框中选择的驱动电动机,移动到<位置>领域中设定的位置时,
选择该位置坐标基准的对象。可选择的对象如下。
基准相机1/2: 选择基准相机。
头1 ~ 头6: 选择1号 ~ 6号头。
<速度水平> 领域
选择所选驱动电动机运行时的Speed Level。
可选择的速度级别如下。
1: 最快的速度驱动所选电动机。 (Fastest)
2: 快速驱动所选电动机。 (Fast)
3: 中速驱动所选电动机。 (Middle)
4: 慢速驱动所选电动机。(Slow)
5: 最慢的速度驱动所选电动机。 (Slowest)
<位置> 领域
用于输入所要移动位置的坐标或以所选装置为基准把对象移动到输入坐标位置
并获取该对象的当前坐标。 编辑框中输入的值如下。
X: X轴的坐标值
Y: Y 轴的坐标值
如果被选对象为输送机宽度调节电动机,应输入的不是Y坐标,是输送机宽
度。
Z: Z 轴坐标
R: Theta 轴角度
<移动> 按钮
以所选装置为基准把对象移动到输入坐标位置时使用。
<得到> 按钮
获取被选对象的当前位置(坐标或角度)其结果显示在状态表示领域。
<移到固定相机> 按钮
选择的对象移动到固定相机位置。
<装置> 组合框
选择基准原点的方式。 可选择的基准原点如下。
设备配置合理: 指定设备的原点为基准原点。
前面喂料器座(1): 指定前置工序的喂料器组的原点为基准原点。
4-21
Tools
简化操作
(shortcut)
菜单
后面喂料器座(2): 指定后置工序的喂料器组的原点为基准原点。
状态表示领域
显示手动操作时发生的信息。
<Park Front> 按钮
与前ANC社区接待龙门,龙门背面移动到附近的Y2+极限位置。
<Park Rear> 按钮
接待龙门后龙门附近的ANC附近的Y1+极限位置,并将其移动到后面。
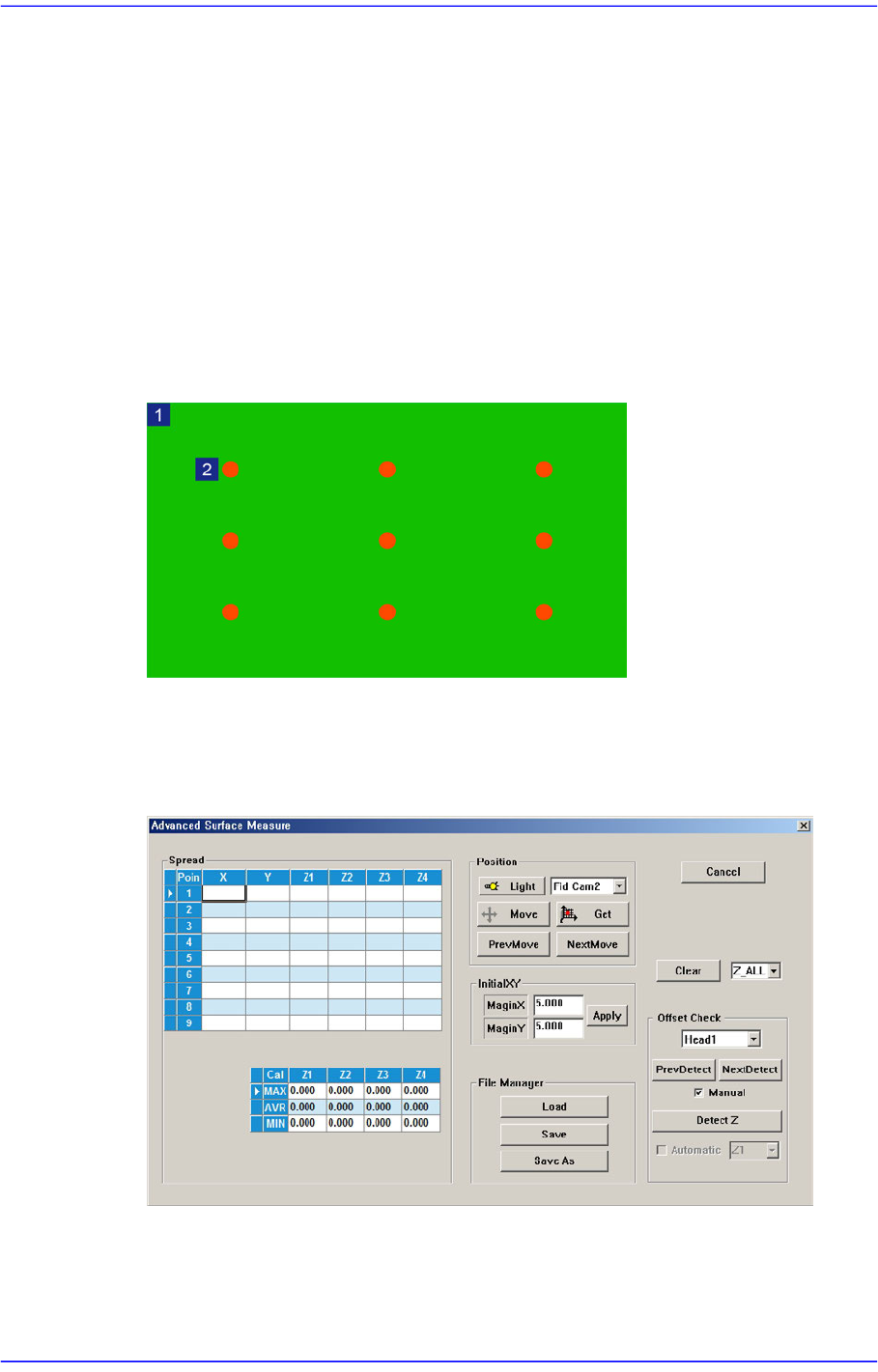
<Advanced Surface Measure> 按钮
为了对检查基板平坦度的值进行设置而示教基板的9点。
1: Board
2: Teaching Point
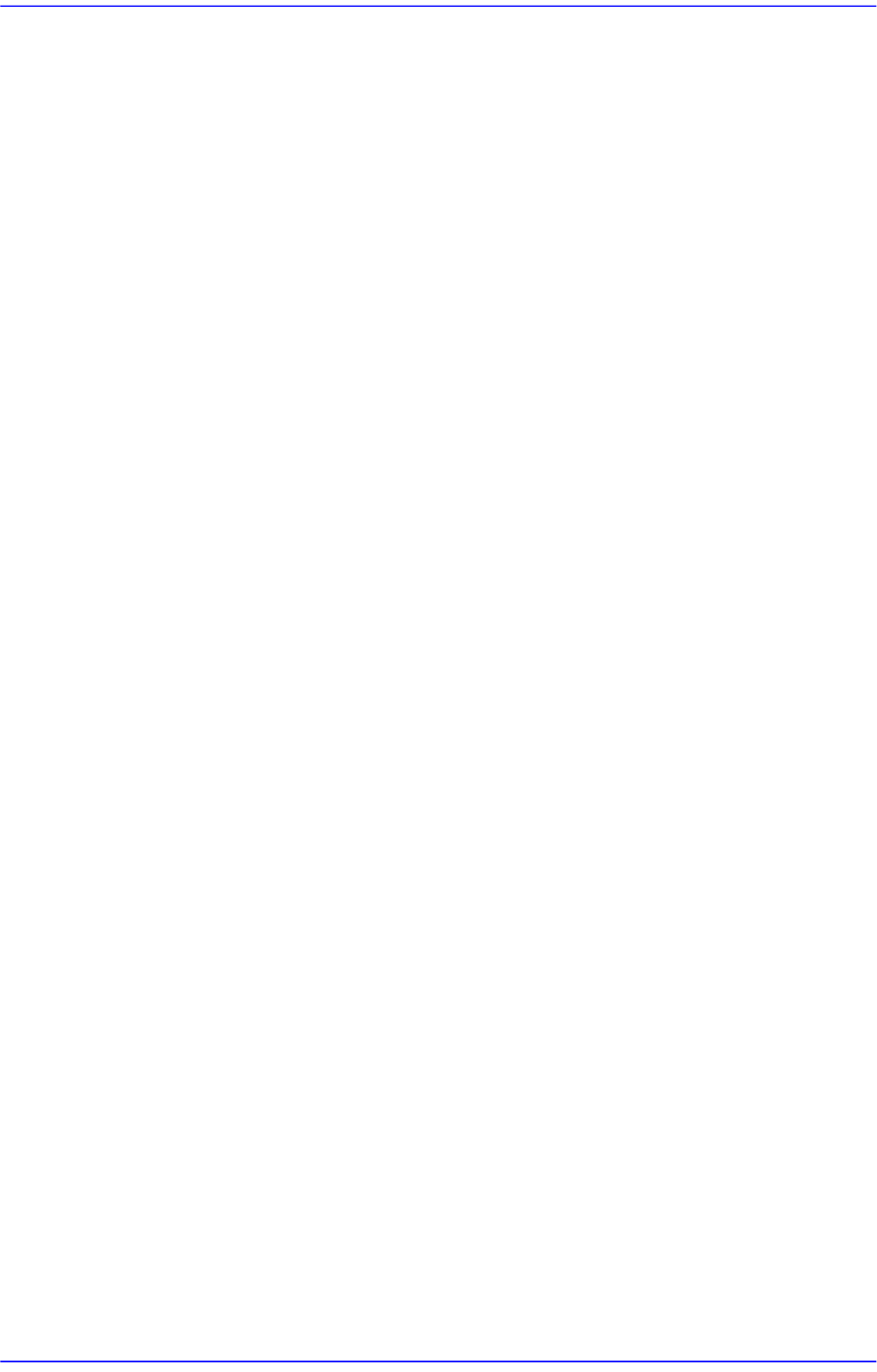
单击<Advanced Surface Measure> 按钮就会出现下列对话框。
<Spread> 领域
针对在<InitialXY> 领域输入的Margin值进行计算后自动登记X、Y值。
4-22
Advanced Chip Shooter DECAN S2 Administrator’s Guide
<Point> 列
该位置用来测量基板的平坦度。
<X> 列
平坦度测量位置的X位置值。
<Y> 列
平坦度测量位置的Y位置值。
<Z1~4> 列
在X、Y位置值测量的Z高度值。
<MAX> 行
表示基板9点的Z测量值中的最大值。
<MAX> 行
表示基板9点的Z测量值中的平均值。
<MIN> 行
表示基板9点的Z测量值中的最小值。
<Position> 领域
<Light> 按钮
外部
调节选定拱架的摄像头的外部照明亮度。
内部
调节选定拱架的摄像头的 内部照明亮度。
<Move> 按钮
移动选定Gatry的基准相机。
<Get> 按钮
选定的Fiducial Mark位置上应用当前位置的坐标值。
<PrevMove> 按钮
Fiducial Camera从当前位置移动到上一个位置。
<NextMove> 按钮
Fiducial Camera从当前位置移动到下一个位置。
<InitialXY> 领域
<MarginX> 编辑框
是基板的X方向的Margin值。