SM411F_Service Manual.pdf - 第132页
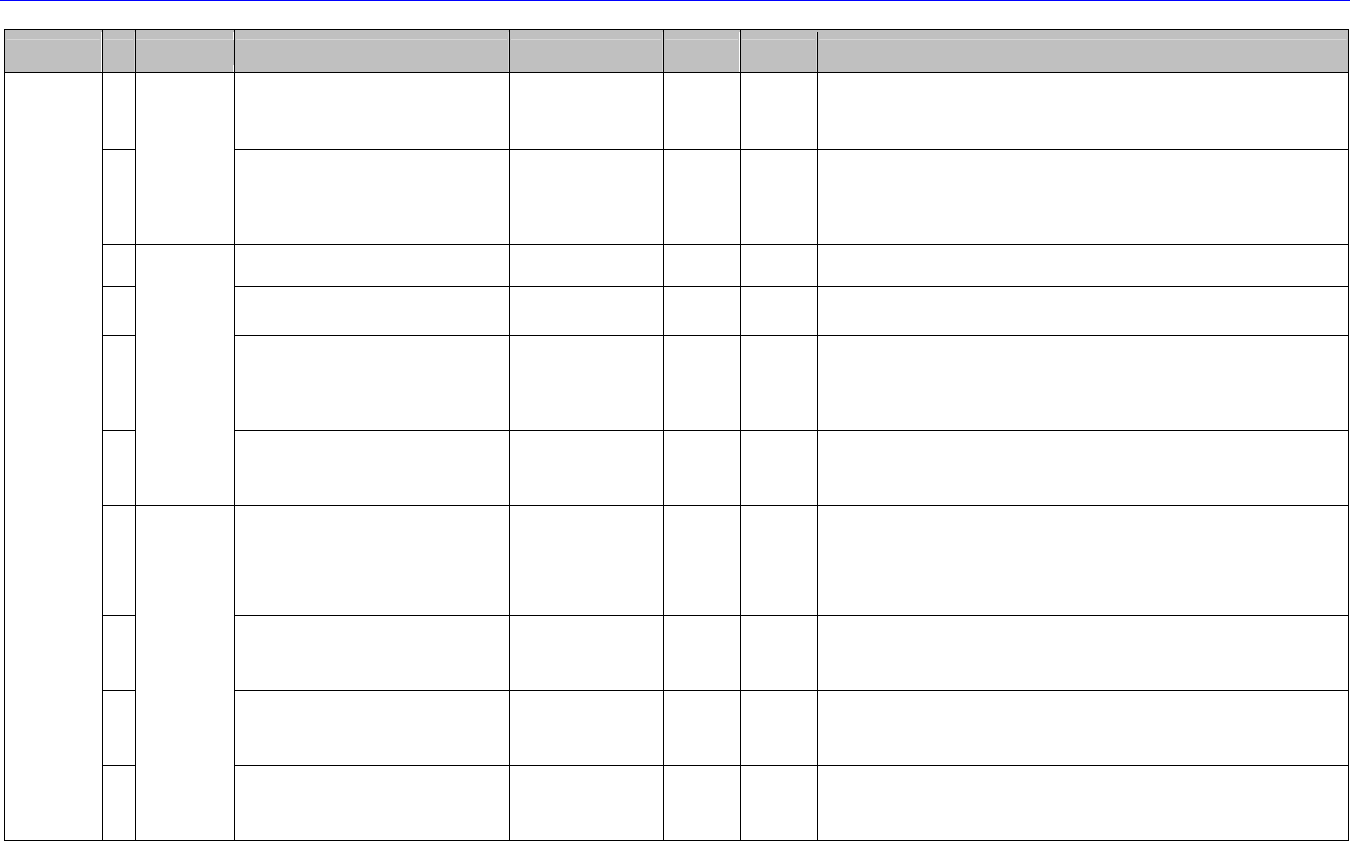
Softwar e Module No Constant Name Classification Va l u e Unit Description 59 VIS_NZ_CHK_DISPLA Y Use 0 const 0: Not displa y the dialo g box for the nozzle check b y the vision, 1: Display it Jog Box 40 System OPT_Z_CHK…
Software
Module
No
Constant Name Classification
Value
Unit Description
34
OPT_NZ_VIS_CHK Use 0 Const
Check if there is a nozzle in the ANC pocket before placing the nozzle.
0: It does not check.
1: It checks.
64
System
OPT_ANC_SHUTTER Use 0 Const
Use the function to minimize the Open/Close movement of the ANC
shutter when getting the nozzle.
0: Not user
1: use
25
SYS_DELAY_ANC Use 200 msec The delayed time after the sense of the ANC sensor.
26
NZ_GET_DN_MARGIN Use 1200 um
he further amount of the down movement of the head when it moves
down to pick the nozzle.
90
NZ_EXIST_CHK_METHOD Use 1 Const
Set the method to check the existence of the nozzle.
0: Use the nozzle check sensor if it is CP45 and use pneumatic pressure
if it is CP55 or SM320(SM321).
1: Use the binary pixel count function that uses the vision system.
91
Factory
NZ_VIS_USE_CHK_VALUE Reserved 30 %
When checking the existence of the nozzle by using the vision system,
set the criteria for the nozzle existence check to white pixel 30%.
36
METHOD_VIS_NZ_CHK Use 1
Option for the recognition method for the vision system when checking
the existence of the nozzle by using the vision system.
0: Individual recognition method
1: Simultaneous recognition method
50
IGNORE_NOZ_CHK_SENSOR Use 0 0 , 1
When the nozzle check sensor has a problem, if this value is set to 1,
the sensor does not check the nozzle.
53
VIS_NZ_CHK_DELAY_TIME Use 50 msec
Time delay constant necessary for simultaneous recognition when
checking the nozzle existence by using the vision system.
ANC
58
Debug
ANC_SPEED_OPTI Use 1 const
Set the LookAhead function.
0: Not set, 1: Set
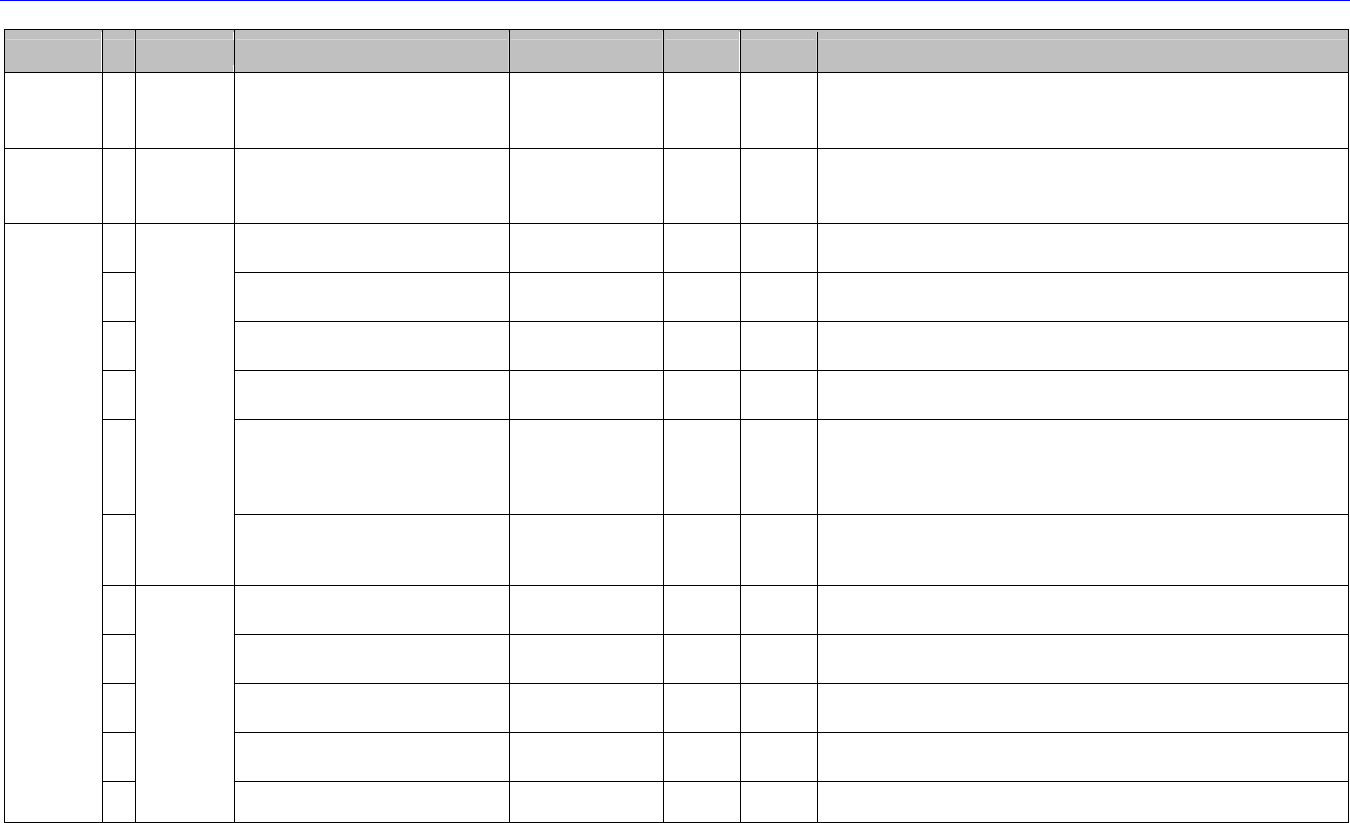
Software
Module
No
Constant Name Classification
Value
Unit Description
59
VIS_NZ_CHK_DISPLAY Use 0 const
0: Not displa
y
the dialo
g
box for the nozzle check b
y
the vision, 1:
Display it
Jog Box 40
System OPT_Z_CHK_AT_BANG_MODE Use 0 Const
Use Z Safety Check when performing XY movement in the Bang Bang
Mode of the JogBox.
0: Not Check, 1: Check
43
OPT_USE_VAC_PLATE Use 0 Const
0 : The vacuum plate function is not used. , 1 : Use the vacuum plate
function.
44
OPT_VAC_PLATE_CHK_DELAY Use 0 msec
Waitin
g
time until the check b
y
the Vacuum plate sensor after the PCB is
locked.
45
OPT_VAC_PLATE_OFF_DELAY Use 100
msec
Waiting time until the next movement after turnin
g
off the vacuum of the
vacuum plate.
60
OPT_VAC_DUMP_SAVER_TIME_O
UT
Use 300 sec
When the vacuum of the head is not used in the Idle mode, cut off the
vacuum pump after a given period of time.
66
OPT_PICK_VAC_CHK Use 1 Const
0:Not use the routine to check if the part is picked up or not when
picking the part.
1: Use the routine to check if the part is picked up or not when picking
the part.
67
System
OPT_VAC_CHK_MNT_LEVEL Use 30 mmHg
Reference vacuum to determine whether to pick up the part by using the
difference between the vacuum pressure just before the placement and
that for the recognition.
63
SYS_HEAD_VAC_DELAY Use 8 msec
Delay from the Z pulse ending to the creation of the vacuum Sol Off
signal.
64
SYS_HEAD_VAC_TIME Use 5 msec
The period of time from the time the vacuum Sol is turned off until the
vacuum is released.
65
SYS_HEAD_VAC_GEN_TIME Use 30 msec
The period of time from the time the vacuum Sol is turned off until the
vacuum is created.
66
SYS_HEAD_VAC_REL_TIME Use 30 msec
The period of time from the time the vacuum Sol is turned off
until release of the vacuum is stabilized.
Vacuum
67
Factory
SYS_HEAD_VAC_TIME2 Reserved 0 msec The time for minimum change when releasing the vacuum.
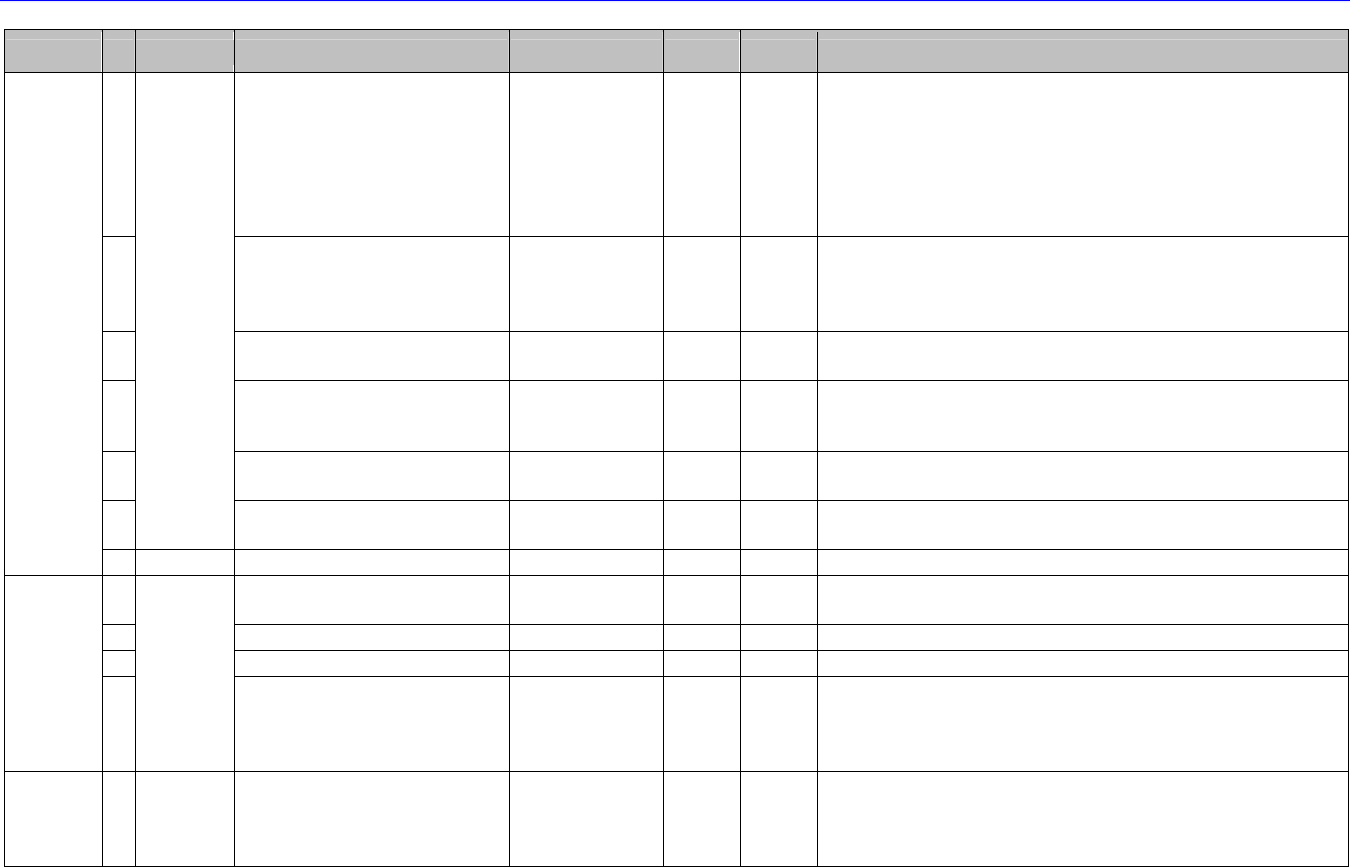
Software
Module
No
Constant Name Classification
Value
Unit Description
69
SYS_HEAD_VAC_METHOD Use 34 Const
Add each value of the method related to the vacuum control.
1: Check the Open Level at each cycle.
2: Check the Open Level whenever ANC is performed.
8: Check the Open Level only when performing the Vac Check (Pick
Check).
16: Check for the nozzle clogging at each cycle.
32: Check for the nozzle clogging each time a part is dumped.
71
SYS_Z_OFFSET_VAC Use 40 um
The difference between the actual value and the measurement value of
the Z-axis height when it is measured using the vacuum.
The difference of the value when inserting the CN040 in the nozzle-
holder.
74
PICK_TEACH_VAC_METHOD Reserved 0 Const
Set whether to compensate the hei
g
ht b
y
usin
g
the vacuum for the small
part when a retry (Pickup) error occurred. (1: Use , 0: Not Use)
75
PICK_TEACH_VAC_DIST Reserved 0 um
When usin
g
the pickup position compensation function usin
g
the
vacuum, the difference between the measured value and the
compensated value.
96
VAC_CLOSE_DETECT_ABS Use 600 mmHg
The absolute value for the criteria for the nozzle clogging (used for the Z
offset).
97
VAC_CLOSE_DETECT_DIFF Use 60 mmHg
The difference value for the criteria for the nozzle clogging (used for the
Z offset).
47
Debug SKIP_VAC_SENSOR_ADJ Use 0 0 , 1 0: Adjust and check the VAC sensor in Auto mode. 1: Not checked.
46
OPT_HEAT_SENSOR_TERM Use 0 msec
0: Not used. Inform the operator of the heat sensor detection at the input
cycle.
47
OPT_AREA_SENSOR Use 0 Const 0: The area sensor is not used, 1: Use the area sensor.
48
OPT_BYPASS_SW_TIME Use 600
sec 0: Not used. Inform the bypass state at the input cycle.
Safety
49
System
OPT_BYPASS_SW_DOOR Use 0 Const
0: Check all the doors with only one ByPass key of the machine.
1: There is a ByPass key for each door. Check the front door.
2: There is a ByPass key for each door. Check the rear door.
3: There is a ByPass key for each door. Check the front and rear door.
Align /
Mount
50
System
OPT_MFOV_NO_Z_UP Use 0 Const
0: When performing split recognition(MFOV), the Z axis moves down
during XY movement.
1: When performing split recognition(MFOV) , the Z axis does not move
down during XY movement.