SM411F_Service Manual.pdf - 第50页
<FIND LIMIT ALL AXIS> button Finds the Limits of all axes. <Home Info.> Group If the mirror axis is selected, the <Home Offset> edit box will be enabled. It is used to perform calibration for the mi…
H1R-Z2: Z axis of head2 of the Gantry2
H1R-Z3: Z axis of head3 of the Gantry2
H1R-Z4: Z axis of head4 of the Gantry2
H1R-Z5: Z axis of head5 of the Gantry2
H1R-Z6: Z axis of head6 of the Gantry2
H1R-M1: Mirror axis of the Gantry2
H1R-R1: Theta axis (H1, H2) of the Gantry2
H1R-R3: Theta axis (H3, H4) of the Gantry2
H1R-R5: Theta axis (H5, H6) of the Gantry2
ST1F-W: Width control motor of the work Station(F2)
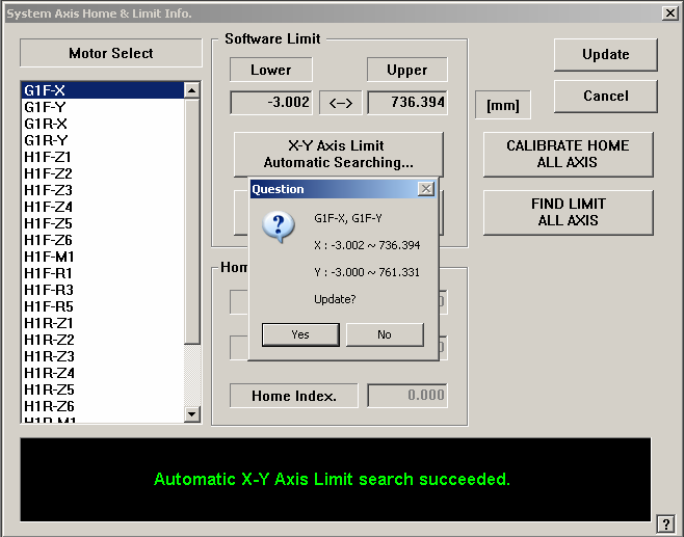
<Software Limit> Group
<X-Y Axis Limit Automatic Searching…> button
Finds the limit of the X and Y axes automatically and checks whether to
apply the changed value.
<Skew Compensation> button
Activated when selecting the Y axis. It is used to perform the skew
compensation. For further details, refer to “1.2.2 Skew compensation”.
<Calibrate Home> button
Automatically finds and reflects the home position of the motor selected from
the <Motor Select> list box.
<CALIBRATE HOME ALL AXIS> button
Automatically finds and reflects the home positions of all axes.
<FIND LIMIT ALL AXIS> button
Finds the Limits of all axes.
<Home Info.> Group
If the mirror axis is selected, the <Home Offset> edit box will be enabled. It is
used to perform calibration for the mirror axis.
<Update> button
Transmits the set data to the machine and closes the dialog box.
<Cancel> button
Ignores the set data and closes the dialog box.
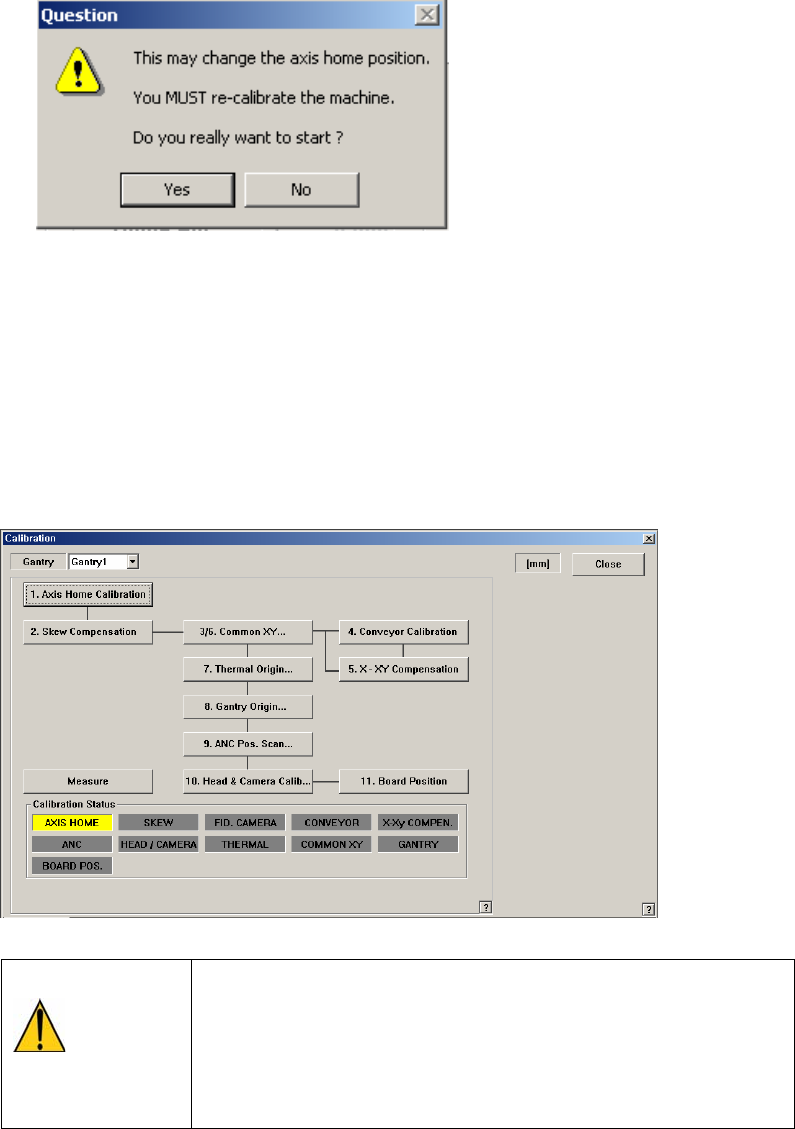
Caution
If calibration is done again, the machine might not operate
properly unless the items related to the equipment position,
such as pick up position, ANC, placement origin are taught
again as the home position is changed.
After calibration, be sure to teach the items related to
position again.
1.2.2. Skew compensation
Skew means compensating the skew occurred horizontally in the X-axis frame
against the Y1-axis and Y2-axis after movement of equipment. This must be done
upon initial installation and after movement of the equipment to a new location.
Method of skew compensation for Y-axis is as follows;
Caution
<Skew Compensation> must be performed before ‘return to
origin’ following initial installation or movement of
equipment. Otherwise, the equipment may be damaged
during operation.
First, move the X frame manually to the center of equipment.
Click on the <Skew compensation> button. Automatic homing on Z-axis is
performed, Y1-axis motor rotates and moves X frame until detecting the Y
home sensor. Once the home sensor has been detected, move to the Y-axis
movement distance (Y Stroke) in the opposite direction, and move to the
opposite direction again until the Y Home sensor is detected.
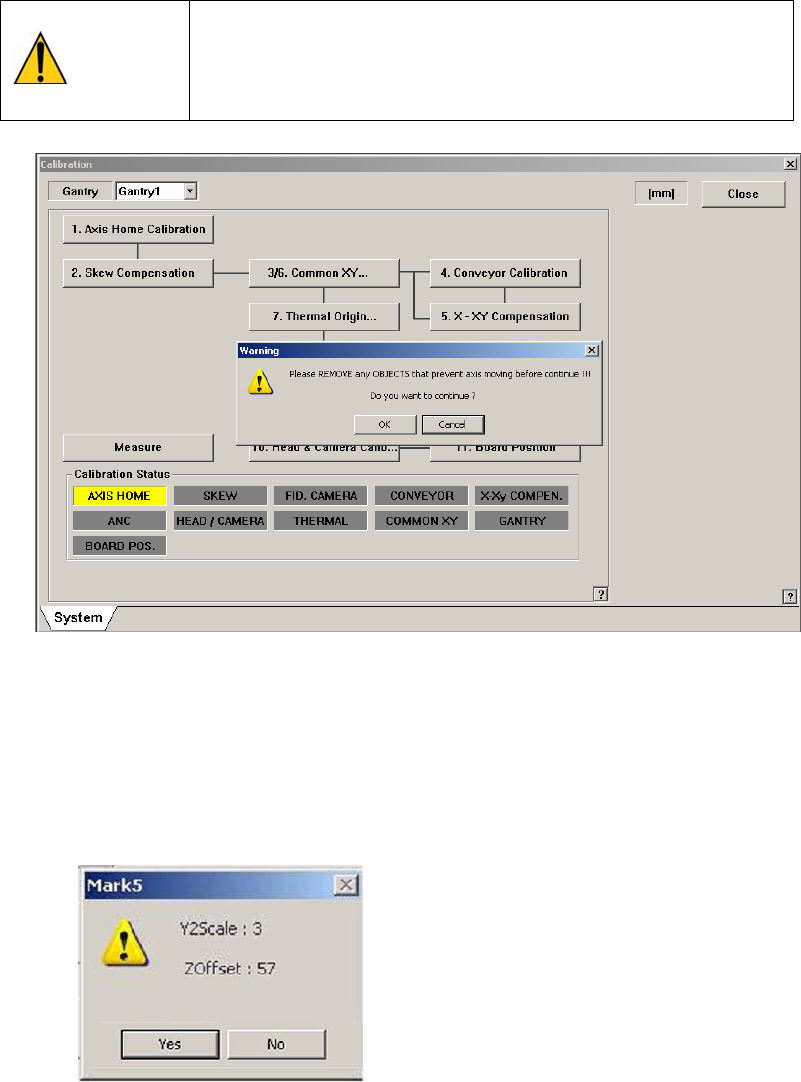
Then, ‘Skew’ information is shown as follows, and asks whether to apply the
value.
Click on the <Yes(Y)> button and <Update> button, and then homing of the
equipment is newly done in accordance with the applied skew information.