00196506-02_UM_X-Serie_SR705_IT.pdf - 第160页
Dati tecnici d el dispositivo automa tico Manuale per l'uso SI PLACE serie X Sistema di trasport o CS A partire dalla versione softw are SR.70x.xx Edizione 01/ 2011 160 3.7.8.2 Conv essità CS durante il montaggi o C…
Manuale per l'uso SIPLACE serie X Dati tecnici del dispositivo automatico
A partire dalla versione software SR.70x.xx Edizione 01/2011 Sistema di trasporto CS
159
3.7.8 Definizione della convessità dei circuiti stampati
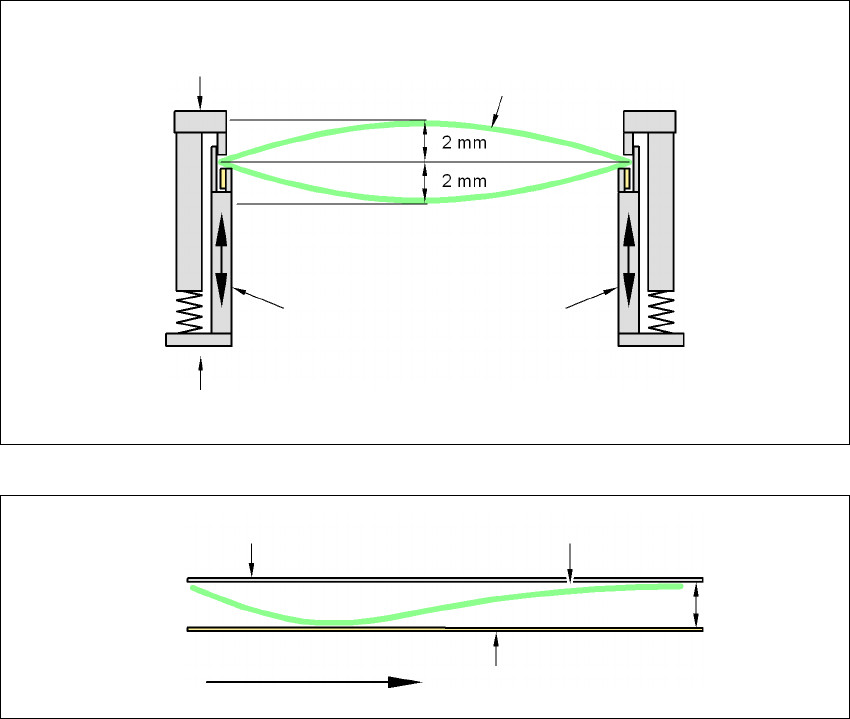
3.7.8.1 Convessità CS durante il trasporto
Convessità CS trasversalmente rispetto alla direzione di trasporto max. 1% della diagonale CS
ma non più di 2 mm
3
Convessità CS in direzione di trasporto + spessore CS < 5,5 mm
3
Angolo di stringimento fisso
Dispositivo di bloccaggio mobile
Circuito stampato
Flangia di trasporto
Angolo di stringimento fisso
Convogliatore di tra-
sporto
Circuito stampato
Direzione di trasporto
CS
5,5 mm
Dati tecnici del dispositivo automatico Manuale per l'uso SIPLACE serie X
Sistema di trasporto CS A partire dalla versione software SR.70x.xx Edizione 01/2011
160
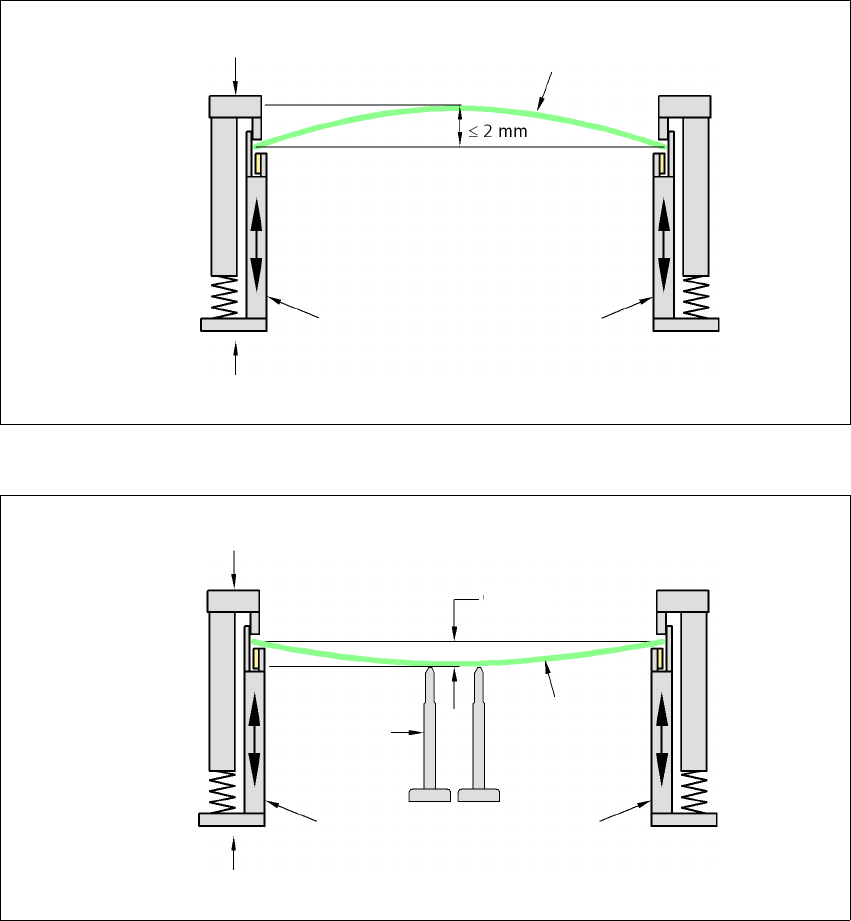
3.7.8.2 Convessità CS durante il montaggio
Con una convessità di 2 mm ci possono essere problemi quando ci si focalizza sulle fiducial locali
e su quelle errate al centro del CS. Il punto focale della videocamera digitale è di 2 mm. Tenendo
conto di tutte le tolleranze, questo valore si riduce a 1,5 mm. Considerare inoltre che l'altezza del
CO si riduce per la convessità.
3
3
Convessità CS in basso max. 0,5 mm
3
→ Usare supporti con spina magnetica per ottenere questo valore.
Dispositivo di bloccaggio mobile
Angolo di stringimento fisso
Circuito stampato
Flangia di trasporto
Circuito stampato
Supporto con
spina magne-
tica
Dispositivo di bloccaggio mobile
Angolo di stringimento fisso
Flangia di trasporto
0,5 mm
Manuale per l'uso SIPLACE serie X Dati tecnici del dispositivo automatico
A partire dalla versione software SR.70x.xx Edizione 01/2011 Sistema Vision
161
3.8 Sistema Vision
3.8.1 Struttura
In ogni testa Collect&Place è integrata una videocamera CO (vedi Fig. 3.5 - 2 pagina 124 e Fig.3.5
- 4 pagina 128). La videocamera CO stazionaria, P&P (tipo 33) 55 x 45, digitale, per la MultiStar
e TwinStar è fissata al telaio della macchina.
Con l'aiuto del modulo Vision CO si calcola
– la posizione esatta del componente nella pipetta e
– la geometria della forma involucro.
Il modulo Vision CS calcola con l'aiuto di fiducial di scheda nel CS
– la posizione del circuito stampato,
– il suo angolo di rotazione
– ed il ritardo del circuito stampato.
Le videocamere CS sono fissate al lato inferiore dei portali. Con l'aiuto di fiducial di superficie sui
caricatori, calcolano la posizione di prelievo esatta dei componenti, cosa importante soprattutto
per i piccoli componenti.
AVVERTENZA
PERICOLO DI SCONTRO CON LA TESTA 3
In caso di sostituzione della testa di montaggio da TwinStar a SpeedStar si devono smontare le
videocamere stazionarie CO di tipo 33, 55 x 45, digitale, e di tipo 25, 16 x 16, digitale (videoca-
mera FC) di TwinStar, altrimenti SpeedStar entra in collisione con gli involucri delle videocamere.
In caso di sostituzione della testa di montaggio da TwinStar a MultiStar la videocamera staziona-
ria CO di tipo 33, 55 x 45, digitale, deve essere installata in basso.