00191327-01.pdf - 第247页
Betriebsanleitung SIPLACE 80S-20/F4/F5 5 Visionfunktionen Ausgabe 05/99 ab Softwareversion SR.405.xx 5.2 LP-Visionsystem Einric hter 5 - 15 5.2 LP-V isionsystem Das LP- Visionsyst em erfaßt di e gena ue Lage der Leit erp…
5 Visionfunktionen Betriebsanleitung SIPLACE 80S-20/F4/F5
5.1 Übersicht über die Visionsysteme an den SIPLACE 80S-20/F4/F5 - Automaten Ausgabe 05/99 ab Softwareversion SR.405.xx
5 - 14 Einrichter
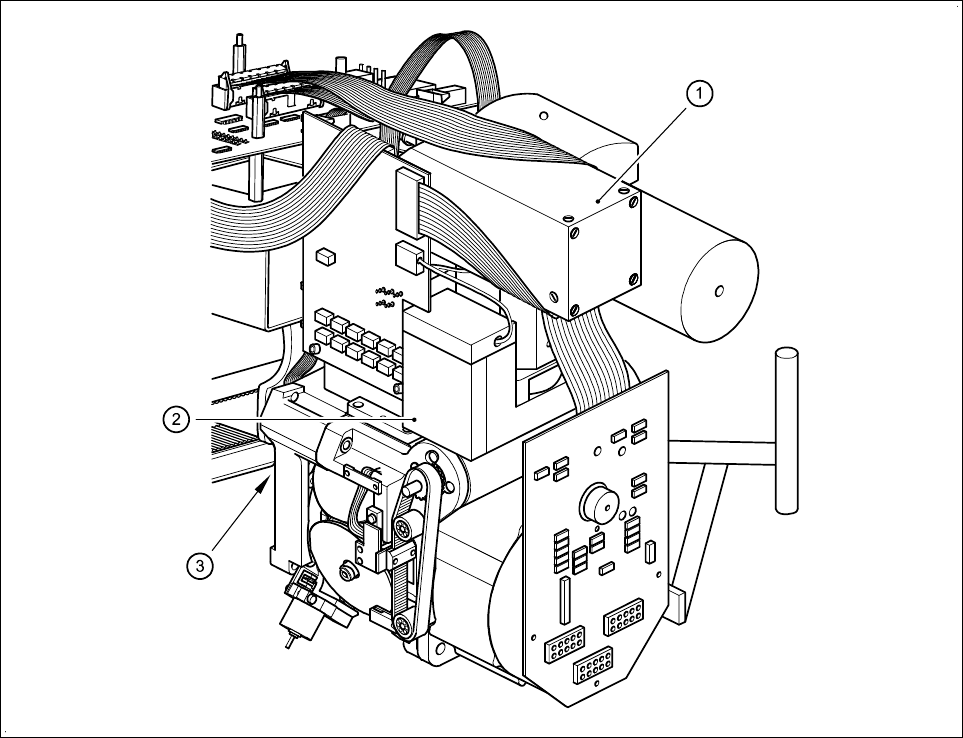
Abb. 5.1.11 Kamerasysteme für die LP- und BE-Lageerkennung am 6er Revolverkopf (mit BE-Visionsystem für Flip-Chips, Bare Dies
und Standardbauelementen) des F
5
-Automaten
- Legende zu Abb. 5.1.11
1 Umlenkspiegel und BE-Optik 2 BE-Kamera
3 LP-Kamera an der Portalunterseite
Die Auswerteeinheit (ICOS-MVS - System), im Steuereinschub des Automaten untergebracht (siehe Abb.
5.1.10, Seite 5 - 13) verarbeitet und wertet die Signale der LP- und BE-Kamerasysteme des 6er Revolver-
und IC-Bestückkopfes aus. Aus den Sollwertabweichungen werden Korrekturwerte ermittelt, die wiederum in
die Neuberechnung der Bestückpositionen und Drehwinkel der zu bestückenden Bauelemente eingehen.
Betriebsanleitung SIPLACE 80S-20/F4/F5 5 Visionfunktionen
Ausgabe 05/99 ab Softwareversion SR.405.xx 5.2 LP-Visionsystem
Einrichter 5 - 15
5.2 LP-Visionsystem
Das LP-Visionsystem erfaßt die genaue Lage der Leiterplatte durch Vermessung von Paßmarken und ermit-
telt den Versatz in x- und y-Richtung, den Verdrehwinkel relativ zur LP-Transportrichtung und die Scherung
der LP. Auch Ausschußmarkierungen (Inkpunkte), werden vom LP-Visionsystem erfaßt und ausgewertet.
5.2.1 Systembeschreibung
Das LP-Visionsystem zur Leiterplattenlageerkennung besteht aus
l dem optischen System zur Leiterplattenlageerkennung
Jedes Portal besitzt ein eigenes LP-Lageerkennungssystem (siehe Abb. 5.1.2, Seite 5 - 5).
HINWEIS:
Die LP-Lageerkennung wird nur mit Portal 1 durchgeführt.
l der Visionauswerteeinheit
Bei jedem Automaten ist im Steuereinschub eine Auswerteeinheit zur Leiterplatten- und Bauelementelage-
erkennung untergebracht (siehe Abb. 5.1.4, Abb. 5.1.7 und Abb. 5.1.10).
Eine CCD-Kamera (SONY XC75-Kamera) mit integrierter Abbildungs- und Beleuchtungsoptik bildet das opti-
sche LP-Lageerkennungssystem. Das Gesichtsfeld des LP-Moduls beträgt 5,7 mm x 5,7 mm. Innerhalb der
Maße der Gesichtsfelder kann ein Suchfeld in Lage und Größe frei programmiert werden. Die Abbildungs-
optik ist eine spezielle Meßoptik, die Meßfehler aufgrund von Leiterplattenwölbungen weitestgehend kompen-
siert. Die Beleuchtung wird nur während der Aufnahme von Paßmarken eingeschaltet.
Die Visionauswerteeinheit (MVS) ist ein Einplatinensystem gemäß VME-Standard. Die Hardware besteht aus:
l dem MVS Motherboard mit Visionprozessor und Schnittstellenverbindungen
Auf der Platinenrückseite sind die
– Steckverbindungen für den VME-Bus und
– die Hochgeschwindigkeitskommunikation (HS
3
L)
untergebracht.
An der Platinenfrontseite befinden sich die Anschlußstecker für
– den Bildschirm
– bis zu 4 Kameraeingänge
Automat LP-Kamera MVS-Auswerteeinheit
80S-20 (2 Portale) 2 1
80F
4
(1 Portal)
11
80F
5
(1 Portal)
11
Tab. 5.2.1

5 Visionfunktionen Betriebsanleitung SIPLACE 80S-20/F4/F5
5.2 LP-Visionsystem Ausgabe 05/99 ab Softwareversion SR.405.xx
5 - 16 Einrichter
– zwei serielle Schnittstellen (RS232 oder RS422)
und die Anzeige-LEDs für
– die CPU
– den Visionprozessor
– dem Kameraeingang
– die Bildschirmanzeige.
Die Schalter für ’RESET’ und ’ABORT’ finden Sie unterhalb der Anzeige-LEDs
l dem MVS Kamerainterface (Huckepackplatine) für bis zu vier CCD-Kameras.
5.2.2 Technische Daten
Kamera-Typ: SONY XC75
Anzahl der Pixel: Kamera 768 (H) x 494 (V), Bild 640 (H) x 484 (V)
Gesichtsfeld: 5,7 mm x 5,7 mm
Beleuchtungsmethode: Auflichtverfahren (wird beim Meßvorgang aktiviert)
Bildverarbeitung: Korrelationsprinzip, Grauwertesystem
Bildschirm: RGB - Monitor (VGA-Modus) 640 x 484 Pixel des Stationsrechners
Paßmarken: Bibliotheksspeicher für bis zu 255 Markendefinitionen
5.2.3 Funktionsbeschreibung
Vor dem Bestücken werden Lage, Verdrehwinkel und Scherung der Leiterplatte aufgrund der Positionen der
Paßmarken vom LP-Visionsystem ermittelt. Abweichungen von den Sollwerten werden dann als Korrekturen
in die Bestückpositionen der Bauelemente eingerechnet.
Auf einer Leiterplatte müssen mindestens 2 Paßmarken aufgetragen sein, damit das System Abweichungen
der LP-Position und des LP-Drehwinkels zu erkennen vermag. Bei Auftrag von 3 Paßmarken erhalten Sie
zusätzlich Informationen über Scherung und Verzug der Leiterplatte und des Leiterplattenlayouts.
5.2.4 Funktionsablauf
Bevor eine Marke zur LP-Erkennung verwendet werden kann, muß sie zunächst ’geteacht’ worden sein, d. h.
die Markenstrukturparameter müssen im LP-Visionsystem für das Muster abgespeichert sein.
Mit der am Portal angebrachten LP-Vision-Kamera und dem Visionprogramm wird die Markenstruktur
geteacht. Die Visionauswerteeinheit ermittelt mit Methoden der digitalen Bildverarbeitung die signifikanten
Markenstrukturparameter.
Das Meßverfahren läuft in 2 Stufen ab:
– 2D-Mustersuchverfahren (2-dimensionales Verfahren) im Grobraster und vorläufige Bestimmung der
Markenkoordinaten
– D-Mustersuchverfahren (1-dimensionales Verfahren) für eine genaue Lagebestimmung der Paßmar-
ken.