00191327-01.pdf - 第261页
Betriebsanleitung SIPLACE 80S-20/F4/F5 5 Visionfunktionen Ausgabe 05/99 ab Softwareversion SR.405.xx 5.3 BE-Visionsystem Einric hter 5 - 29 5.3.4 Kriterien zur Erfassun g von Bauelementen Form der Bauelemente Mit der opt…

5 Visionfunktionen Betriebsanleitung SIPLACE 80S-20/F4/F5
5.3 BE-Visionsystem Ausgabe 05/99 ab Softwareversion SR.405.xx
5 - 28 Einrichter
5.3.3.3 Technische Daten des BE-Visionsystems für Flip-Chips, Bare Dies
und Standard-BEs am 6er-Revolverkopf (DCA-Option)
Kamera-Typ: SONY XC75CE
Anzahl der Pixel: 570 x 570
Gesichtsfeld: 15,7mm x 15,7 mm
Beleuchtungsmethode: Auflichtverfahren (Rotlicht), 4 LED-Ebenen (eben, flach,
mittel, steil)
Bildverarbeitung: HALE - Grauwertverfahren (H
igh Accuracy Lead Extraction)
Bildschirm: RGB - Monitor (VGA-Modus) 640 x 484 Pixel
BE-Größen: 0,25 mm x 0,5 mm ... 13 mm x 13 mm
Spektrum der erkennbaren Bauelemente: Flip-Chips, Bare Dies, BEs bis 13mm x 13mm
Minimaler Beinchenabstand 0,2 mm
Minimaler Balldurchmesser: 110 µm
5.3.3.4 Funktionsbeschreibung
Ein Segment des 6er Bestückkopfes nimmt an der Sternstation 1 ein Bauelement auf. Der Stern taktet weiter,
weitere Bauelemente werden aufgenommen. In Sternstation 4 befindet sich die optische Einheit des BE-Visi-
onsystems. Dort angekommen leuchten zwei räumlich versetzte LED-Reihen das Bauelement mit Rotlicht
gleichmäßig aus. Die Optik bildet Bauelemente bis zu einer Höhe von 8,25 mm scharf auf den CCD-Chip der
Kamera ab.
Die von der Bauelementekamera erzeugte digitale BE-Abbildung wird in die Visionauswerteeinheit übertra-
gen. Mit Hilfe von Methoden der digitalen Bildverarbeitung (HALE-Verfahren) vergleicht die Auswerteeinheit
die BE-Abbildung mit einem zuvor im GF-Editor (Gehäuseform) erzeugten synthetischen Modell. Die daraus
gewonnenen Parameter liefern Aussagen zu Positionsabweichungen, Verdrehwinkel, Beinchenzustand und
BE-Reidentifikation. Das HALE-Verfahren hat sich als sehr robust gegenüber Störeinflüssen wie Störreflexio-
nen, unterschiedlichem Reflexionsverhalten von Beinchen, Streulichteinflüssen usw. erwiesen. Es ist genauer
und schneller als das Matching-Verfahren. Nach erfolgreicher Messung dreht das Segment das Bauelement
in Sternstation 9 in die korrekte Bestückeinrichtung. In Sternstation 1 wird das Bauelement dann lagekorrekt
auf die Leiterplatte bestückt.
Betriebsanleitung SIPLACE 80S-20/F4/F5 5 Visionfunktionen
Ausgabe 05/99 ab Softwareversion SR.405.xx 5.3 BE-Visionsystem
Einrichter 5 - 29
5.3.4 Kriterien zur Erfassung von Bauelementen
Form der Bauelemente
Mit der optischen Bauelementezentrierung können neben regelmäßigen auch unregelmäßige Bauelemente
zentriert werden. Als maximale Beinchenanzahl sind für die horizontale bzw. vertikale Richtung jeweils 99
Beinchen zugelassen.
Kriterien für regelmäßige Bauelemente
Definition
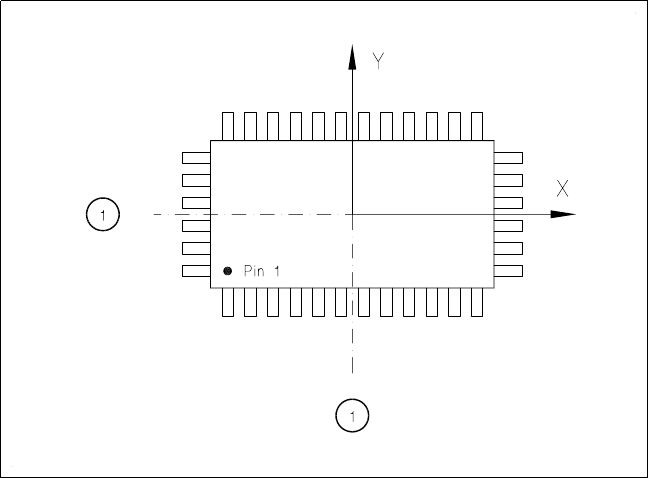
Ein Bauelement wird als regelmäßig bezeichnet, wenn folgende vier Bedingungen erfüllt sind:
– rechteckige Gehäuseform (Sonderfall: quadratische Form)
– nur ein Beinmodell (lead-type)
– nur eine Beingruppe pro Seite
– Die gegenüberliegende Beingruppen sind jeweils symmetrisch zu den beiden Hauptachsen
(x-, y-Achse).
Abb. 5.3.1 Regelmäßiges Bauelement
- Legende zu Abb. 5.3.1
1 Symmetrieachse
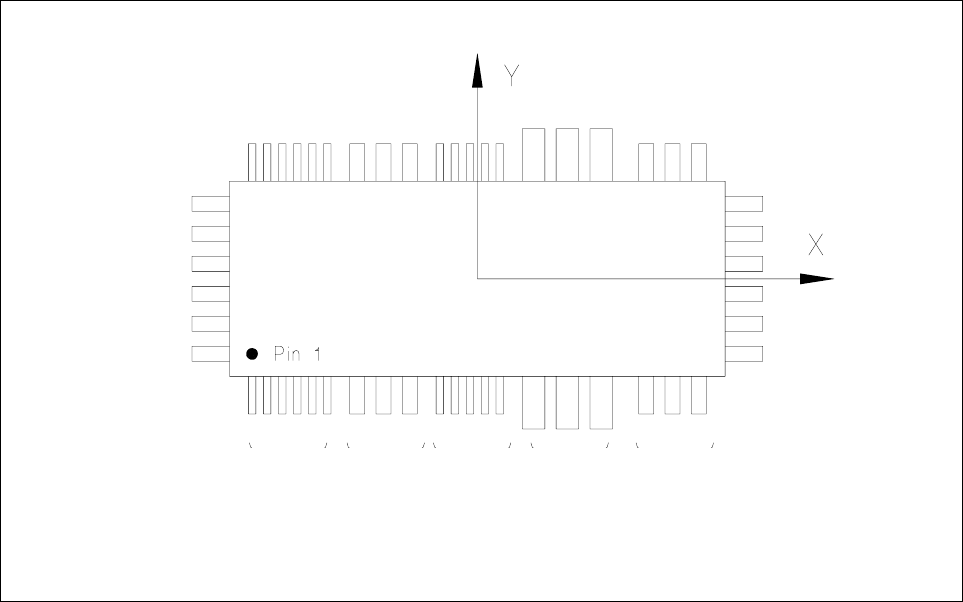
Kriterien für unregelmäßige Bauelemente
Definition
Ein Bauelement wird als unregelmäßig bezeichnet, wenn es nicht die Bedingungen für regelmäßige Bauele-
mente erfüllt.
Zusätzliche Bedingungen für die Zentrierung mit dem BE-Visionsystem:
– In einer Reihe sind bis zu 3 verschiedene Beinmodelle erlaubt.
– In einer Reihe sind bis zu 15 Gruppen zulässig.
5 Visionfunktionen Betriebsanleitung SIPLACE 80S-20/F4/F5
5.3 BE-Visionsystem Ausgabe 05/99 ab Softwareversion SR.405.xx
5 - 30 Einrichter
Abb. 5.3.2 Beispiel für unregelmäßige Bauelemente
Teilungsabweichung
Für jedes Bauelement kann im GF-Editor die Teilungsabweichung (das ist der Teilungsabstand von Beinchen-
mitte bis Beinchenmitte) gesondert eingegeben werden. Wird dieser Wert überschritten, wird das Bauelement
nicht zentriert und somit nicht bestückt.
Grenzwert der Qualitätsmessung
Die Bauelemente dürfen die Grenzwerte der Qualitätsmessung nicht überschreiten, weil sie dann nicht
bestückt werden.
Grenzwerte sind:
– Differenz der Beinchenanzahl zwischen Original und Model.
– Teilungsabweichung größer als der Wert in der GF-Datei.
– Größerer Orthogonalitätsfehler, als in der GF-Datei vorgegeben.
– Größere Abweichung der Außenmaße.
– Größere Abweichung des Mittelpunkts als die zulässige Lagetoleranz beim Abholen.
Modell 1 Modell 2 Modell 1 Modell 3 Modell 2
Gruppe 1 Gruppe 1 Gruppe 2 Gruppe 1 Gruppe 2