00197497-03_UM_SiplaceCA-Serie_DE.pdf - 第145页
Betriebsanleitung SIPLACE CA-Serie 3 Technische Daten Ab Softwareversion SR 708.0 Ausgabe 12/2014 DE -DRAFT 3.7 Bestückköpfe 145 3.7.1.1 Beschreibung Der SIPLACE S peedSt ar (C&P20 M) ar beitet nach dem Collect&P…
3 Technische Daten Betriebsanleitung SIPLACE CA-Serie
3.7 Bestückköpfe Ab Softwareversion SR 708.0 Ausgabe 12/2014 DE -DRAFT
144
3
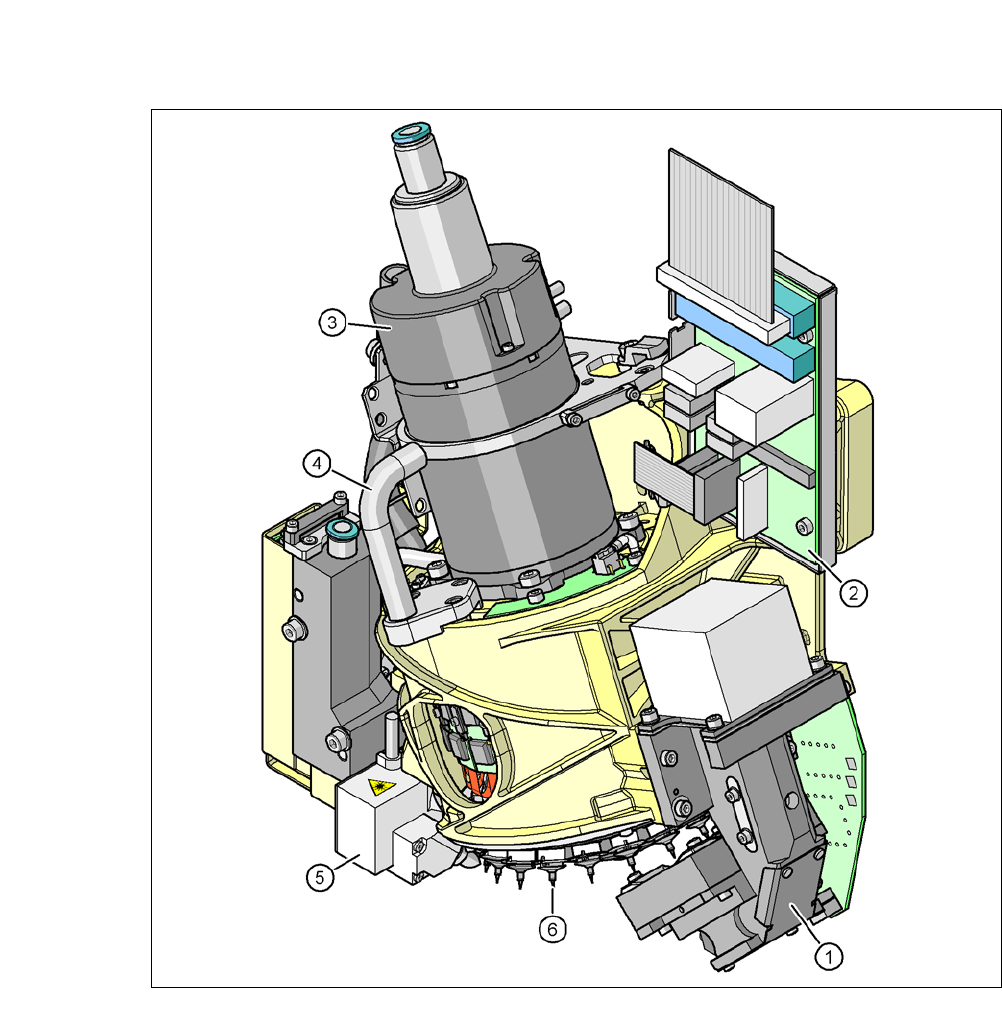
Abb. 3.7 - 2 SIPLACE SpeedStar (C&P20 M) - Funktionsgruppen Teil 2
(1) BE-Kamera C&P, Typ 23, 6 x 6, digital
(2) Zwischenverteiler-Platine
(3) Sternmotor
(4) Griff
(5) BE-Sensor
(6) Stern mit 20 Pipetten

Betriebsanleitung SIPLACE CA-Serie 3 Technische Daten
Ab Softwareversion SR 708.0 Ausgabe 12/2014 DE -DRAFT 3.7 Bestückköpfe
145
3.7.1.1 Beschreibung
Der SIPLACE SpeedStar (C&P20 M) arbeitet nach dem Collect&Place-Prinzip, d. h. innerhalb ei-
nes Zyklus werden zwanzig Bauelemente vom Bestückkopf abgeholt. Der BE-Sensor überprüft
an der Bestück-/Abholposition, ob ein Bauelement von der Pipette aufgenommen wurde. Auf dem
Weg zur Bestückposition werden die Bauelemente optisch zentriert und in die erforderliche Be-
stücklage gedreht. Danach werden sie mit Blasluft sanft und positionsgenau auf die Leiterplatte
abgesetzt.
Mit dem Bestückkopf C&P20 M gelang es, die Leistung des Bestückkopfes und damit zugleich
des Bestückautomaten erheblich zu steigern. Die kompakte Bauweise des C&P20 M-Kopfes er-
möglicht sehr kurze Zykluszeiten. Dabei steht die Sternachse schräg zur Leiterplattenebene. Mit
dieser Geometrie lassen sich die Segmente auf engstem Raum anordnen.
Die BE-Kamera ist weiterhin in den C&P20 M-Kopf integriert. Dies spart zusätzliche Fahrwege zu
externen Zentrierkameras. Zudem besitzt jedes Segment einen eigenen DP-Antrieb zum Rotieren
der Pipette. Die Pipetten werden deshalb nicht mehr an einer einzigen Kopfstation in die richtige
Lage gedreht. Sie können jederzeit und unabhängig voneinander in ihre Bestücklage gedreht wer-
den.
Jedes Segment verfügt über einen eigenen Vakuumerzeuger. Die Umschaltzeiten zwischen Va-
kuum und Blasluft ließen sich damit erheblich verkürzen. Zudem kann im Haltekreis für jede ein-
zelne Pipette eine Vakuumprüfung durchgeführt werden.
Der Z-Antrieb der Segmente ist mit einem Linearmotor mit linearem Wegmesssystem realisiert
und damit überaus präzise. In der Abhol-/Bestückposition verfährt der Z-Antrieb die Segmente in
vertikaler Richtung nach unten bzw. nach oben.

3 Technische Daten Betriebsanleitung SIPLACE CA-Serie
3.7 Bestückköpfe Ab Softwareversion SR 708.0 Ausgabe 12/2014 DE -DRAFT
146
3.7.1.2 Control- und Selflearning-Funktionen
Control- und Selflearning-Funktionen steigern die Zuverlässigkeit des SIPLACE SpeedStar
(C&P20 M).
– Die Vertikalachse zum Abholen und Bestücken der Bauelemente wird von einem Linear-
motor angetrieben. Der Verfahrweg wird optoelektronisch von einem linearen Wegmess-
system erfasst. Ein Sensor registriert die Relativbewegung zwischen Pipette und
Segment beim Aufsetzen von Bauelementen und sendet ein Signal an die Achsansteu-
erung zur Positionsregelung. Mit diesem Sensor-Stopp-Verfahren werden Höhendiffe-
renzen beim Abholen und Leiterplatten-Unebenheiten beim Bestücken ausgeglichen.
Der Durchschnitt der Abweichungen bei den letzten 10 Bestückvorgängen wird auch für
die Anpassung der weiteren Hub- und Bestückgeschwindigkeit berücksichtigt. Die pro-
grammierte Aufsetzkraft bleibt indes immer konstant.
– Zur Erhöhung der Bestücksicherheit ist ein Bauelemente-Sensor am SIPLACE Speed-
Star (C&P20 M) installiert. Er prüft an der Abhol- und Bestückposition die Anwesenheit
des Bauelements an der Pipette und auch das Kantenverhältnis des Bauelements. Da-
mit lässt sich feststellen, ob das Bauelement quer oder hochkant von der Pipette aufge-
nommen wurde. Zudem wird regelmäßig die Strahlintensität überprüft, um
Fehlmessungen zu vermeiden.
– Auch die Gehäuseform wird überprüft. Weichen die ermittelten geometrischen Daten von
den programmierten Daten ab, wird das Bauelement nicht bestückt.
– Eine digitale BE-Kamera am Bestückkopf bestimmt die genaue Lage jedes Bauelements
an der Pipette. Die Standardkamera, Tpy 23 des SIPLACE SpeedStar (C&P20 M) kann
Bauelemente der Größen 0,2 mm x 0,2 mm bis 6 mm x 6 mm optisch zentrieren. Abwei-
chungen von der Abholposition werden bereits vor dem Bestücken korrigiert. Beim Ab-
holen eines Bauelements wird der Durchschnitt der Abweichungen der letzten 10
Bestückvorgänge berücksichtigt. So lässt sich die Abholgenauigkeit steigern.
3.7.1.3 Funktionsbeschreibung
Der SIPLACE SpeedStar (C&P20 M) besitzt drei Achsen, die DR- oder Sternachse, die Z-Achse
und die DP-Achse.