00197497-03_UM_SiplaceCA-Serie_DE.pdf - 第147页
Betriebsanleitung SIPLACE CA-Serie 3 Technische Daten Ab Softwareversion SR 708.0 Ausgabe 12/2014 DE -DRAFT 3.7 Bestückköpfe 147 3 Abb. 3.7 - 3 Funktionsbeschreibung (1) BE-Abholposition, BE-Best ückposition, BE-Abwurfpo…

3 Technische Daten Betriebsanleitung SIPLACE CA-Serie
3.7 Bestückköpfe Ab Softwareversion SR 708.0 Ausgabe 12/2014 DE -DRAFT
146
3.7.1.2 Control- und Selflearning-Funktionen
Control- und Selflearning-Funktionen steigern die Zuverlässigkeit des SIPLACE SpeedStar
(C&P20 M).
– Die Vertikalachse zum Abholen und Bestücken der Bauelemente wird von einem Linear-
motor angetrieben. Der Verfahrweg wird optoelektronisch von einem linearen Wegmess-
system erfasst. Ein Sensor registriert die Relativbewegung zwischen Pipette und
Segment beim Aufsetzen von Bauelementen und sendet ein Signal an die Achsansteu-
erung zur Positionsregelung. Mit diesem Sensor-Stopp-Verfahren werden Höhendiffe-
renzen beim Abholen und Leiterplatten-Unebenheiten beim Bestücken ausgeglichen.
Der Durchschnitt der Abweichungen bei den letzten 10 Bestückvorgängen wird auch für
die Anpassung der weiteren Hub- und Bestückgeschwindigkeit berücksichtigt. Die pro-
grammierte Aufsetzkraft bleibt indes immer konstant.
– Zur Erhöhung der Bestücksicherheit ist ein Bauelemente-Sensor am SIPLACE Speed-
Star (C&P20 M) installiert. Er prüft an der Abhol- und Bestückposition die Anwesenheit
des Bauelements an der Pipette und auch das Kantenverhältnis des Bauelements. Da-
mit lässt sich feststellen, ob das Bauelement quer oder hochkant von der Pipette aufge-
nommen wurde. Zudem wird regelmäßig die Strahlintensität überprüft, um
Fehlmessungen zu vermeiden.
– Auch die Gehäuseform wird überprüft. Weichen die ermittelten geometrischen Daten von
den programmierten Daten ab, wird das Bauelement nicht bestückt.
– Eine digitale BE-Kamera am Bestückkopf bestimmt die genaue Lage jedes Bauelements
an der Pipette. Die Standardkamera, Tpy 23 des SIPLACE SpeedStar (C&P20 M) kann
Bauelemente der Größen 0,2 mm x 0,2 mm bis 6 mm x 6 mm optisch zentrieren. Abwei-
chungen von der Abholposition werden bereits vor dem Bestücken korrigiert. Beim Ab-
holen eines Bauelements wird der Durchschnitt der Abweichungen der letzten 10
Bestückvorgänge berücksichtigt. So lässt sich die Abholgenauigkeit steigern.
3.7.1.3 Funktionsbeschreibung
Der SIPLACE SpeedStar (C&P20 M) besitzt drei Achsen, die DR- oder Sternachse, die Z-Achse
und die DP-Achse.
Betriebsanleitung SIPLACE CA-Serie 3 Technische Daten
Ab Softwareversion SR 708.0 Ausgabe 12/2014 DE -DRAFT 3.7 Bestückköpfe
147
3
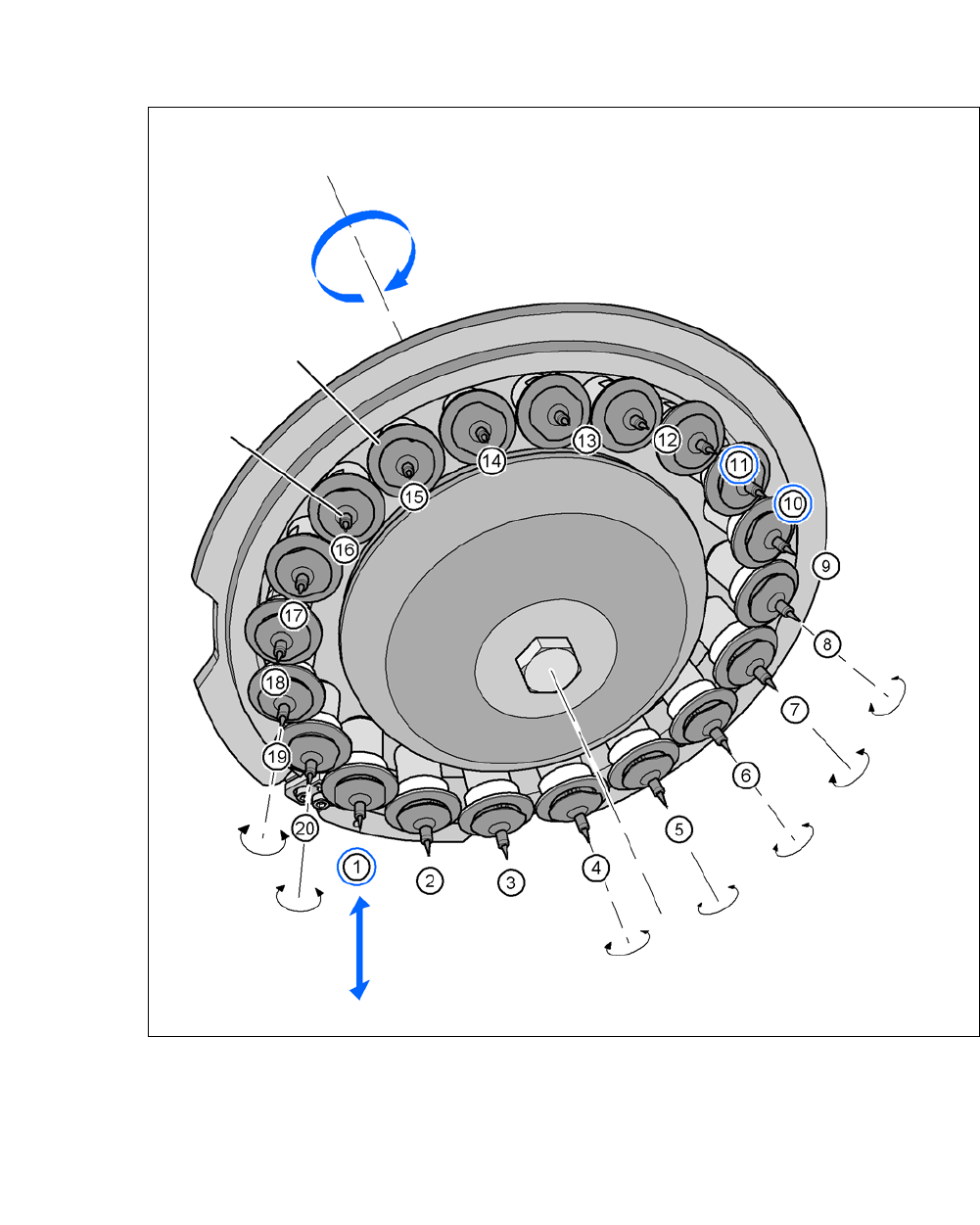
Abb. 3.7 - 3 Funktionsbeschreibung
(1) BE-Abholposition, BE-Bestückposition, BE-Abwurfposition, BE-Prüfung mit BE-Sensor
(10) Vakuumprüfung der Pipette im Haltekreis, mit oder ohne Bauelement
(11) Position für die optische Zentrierung der Bauelemente
Sternrotation
Sternachse
DP-Antrieb (Segment)
Pipette
Z-Achse
BE abholen, bestücken
oder abwerfen
BE mit BE-Sensor prüfen
DP-Achse
Jede Pinole kann indivi-
duell gedreht werden.
BE-Kamera für
die optische
Zentrierung
Vakuum-
prüfung der
Pipette im Hal-
tekreis

3 Technische Daten Betriebsanleitung SIPLACE CA-Serie
3.7 Bestückköpfe Ab Softwareversion SR 708.0 Ausgabe 12/2014 DE -DRAFT
148
Jeder DP-Antrieb, der sich in der untersten Stellung des Sterns befindet (Pos. 1 in Abb. 3.7 - 3),
wird von dieser Achse angehoben oder abgesenkt. Damit werden die Bauelemente von den Zu-
führmodulen abgeholt und auf die Leiterplatte abgesetzt. Zur Erkennung der Aufsetzhöhe ist an
der Bestückposition ein "Z-Achse-unten"-Sensor angebracht, der eine Relativbewegung zwi-
schen Pipette und Segment erkennt. Dieser liefert beim Einfedern der Z-Achse ein Signal - das
Sensor-Stopp-Signal - an die Achskarte, mit dem die Vorsteuerung der Positionsregelung korri-
giert wird. Um im stromlosen Zustand die Kopfcrash-Gefahr durch ein Absinken des Segments
mit der Pinole zu vermeiden, wurde ein pneumatisches Rückholsystem implementiert, das das
Segment im stromlosen Zustand sicher in der oberen Position hält. Unabhängig vom pneumati-
schen Rückholsystem (Pos. 5 in Abb. 3.7 - 1
) ist die Steuerung der Z-Achse so ausgelegt, dass
bei Spannungsausfall der Bestückautomat noch genügend Restenergie im Servoverstärker ge-
speichert hat, die Z-Achse in die obere Position anzuheben. Ein "Powerfail"-Signal im Bestückau-
tomaten aktiviert die Achskarte und weiter den Servoverstärker, um die Z-Achse in die obere
Position zu fahren.
Die Z-Achse ist eine so genannte "intelligente Achse". Sie "merkt" sich die Abholhöhe einer jeden
Zuführmodul-Spur und die Bestückhöhe für jedes Bauelement. So lässt sich der Bestückprozess
beschleunigen, wobei die programmierte Aufsetzkraft konstant bleibt.
Sternachse (Pos. 3 in Abb. 3.7 - 2) 3
Der Stern rotiert mit seinen 20 DP-Antrieben um die Sternachse. Diese ist gegenüber der Vertika-
len geneigt. Als Antriebsmotor dient ein Dreiphasen-Servomotor, der positionsgeregelt betrieben
wird. Ein optoelektronischer Encoder liefert Informationen über den Drehwinkel an die Achskarte.
Die Istwerte der Positionen werden auf der Achskarte ausgewertet. Die Positionsregelung auf der
Achskarte gibt die Sollwerte von Strom und Spannung für den Servoverstärker vor, mit denen der
Sternmotor betrieben wird. An jedem DP-Antrieb sitzt eine Pipette, die das Bauelement beim Ab-
holvorgang ansaugt. Der Stern transportiert das aufgenommene Bauelement von der Abhol-/Be-
stückposition (Pos. 1 in Abb. 3.7 - 3
) zur optischen Zentrierposition (Pos. 11 in Abb. 3.7 - 3) und
weiter zum Bestücken zur Abhol-/Bestückposition. Auf dem Weg zur Abhol-/Bestückposition dreht
der DP-Antrieb das Bauelement in die geforderte Bestücklage.
Z-Achse (Pos. 6 in Abb. 3.7 - 1) 3
Die Z-Achse führt eine Vertikalbewegung aus. Als Antrieb wird ein Dreiphasen-Linearmotor ein-
gesetzt. Zur Wegmessung wird ein optoelektronischer Encoder verwendet. Dabei tastet ein Scan-
ner die Positionsmarken auf einem Maßband ab und liefert damit die Positionssignale an die
Achskarte.
Der Z-Motor wird positionsgeregelt betrieben. Die Istwerte der Position werden auf der Achskarte
ausgewertet. Die Positionsregelung auf der Achskarte gibt die Sollwerte von Strom und Spannung
für den Servoverstärker vor, mit denen der Sternmotor betrieben wird.