00197497-03_UM_SiplaceCA-Serie_DE.pdf - 第218页
4 SIPLACE Wafer-System (SWS) Betriebsanleitu ng SIPLACE CA-Serie 4.3 Beschreibung der SWS-Baugruppen Ab Softwareversion SR 708.0 Ausgabe 12/2014 218 4 Abb. 4.3 - 3 Flip-Kopf - Ansicht von vorne (1) Pipettenaufnahme, Segm…
Betriebsanleitung SIPLACE CA-Serie 4 SIPLACE Wafer-System (SWS)
Ab Softwareversion SR 708.0 Ausgabe 12/2014 4.3 Beschreibung der SWS-Baugruppen
217
4.3.2 Flip-Unit
4
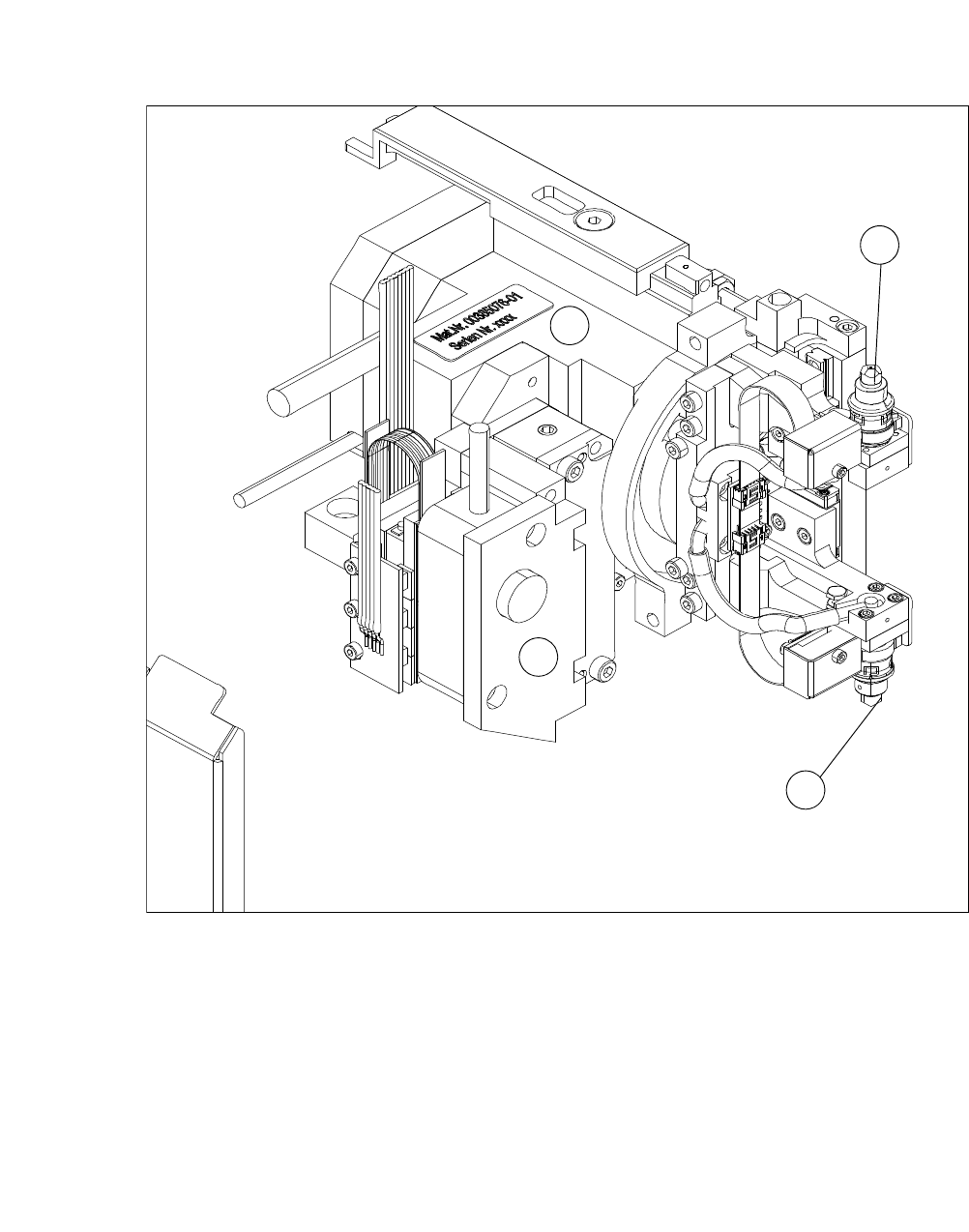
Abb. 4.3 - 2 Flip-Unit
4
4
(1) Flip-Kopf (2) Pipetten- bzw. Toolaufnahme
1
2
2
4 SIPLACE Wafer-System (SWS) Betriebsanleitung SIPLACE CA-Serie
4.3 Beschreibung der SWS-Baugruppen Ab Softwareversion SR 708.0 Ausgabe 12/2014
218
4
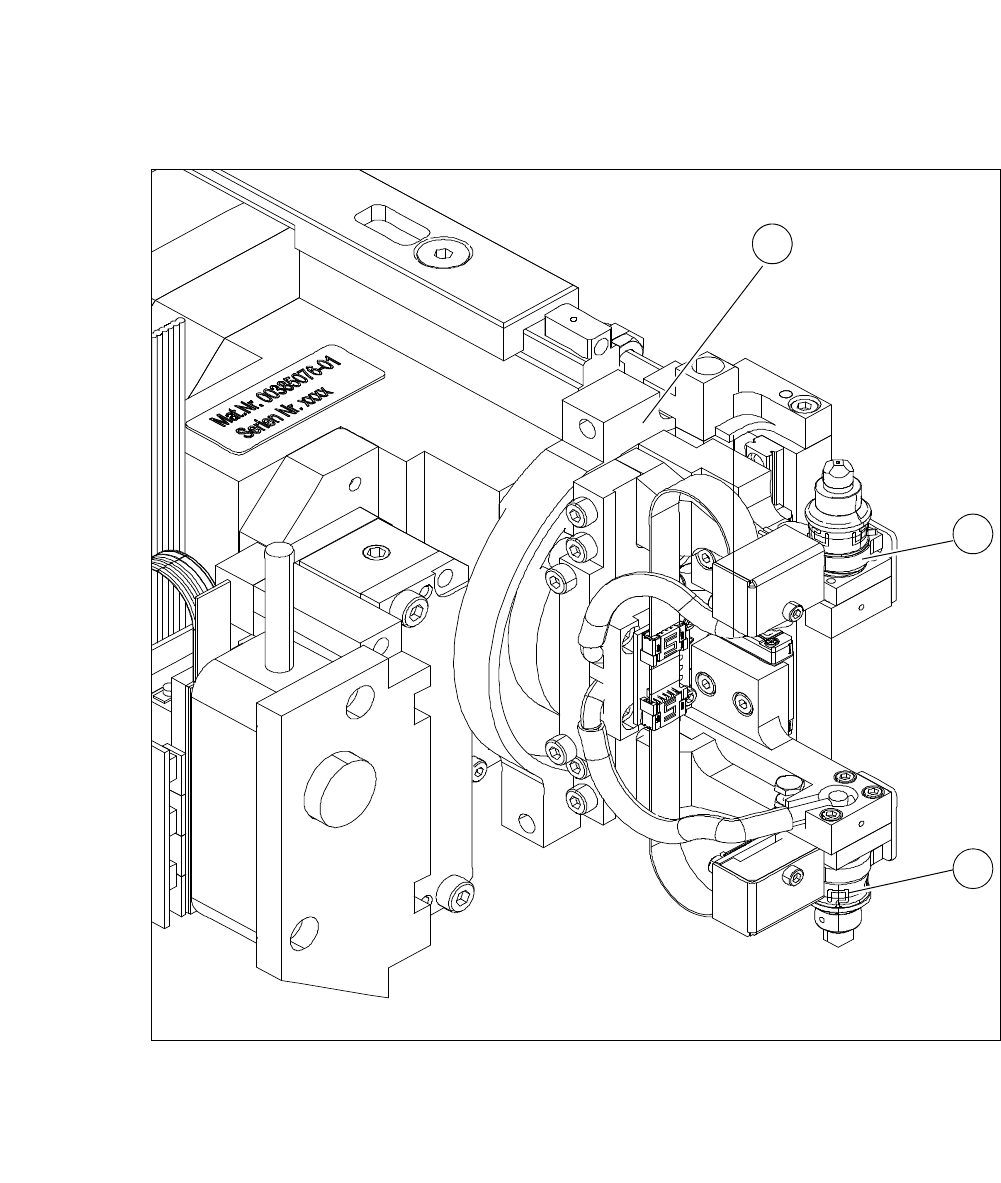
Abb. 4.3 - 3 Flip-Kopf - Ansicht von vorne
(1) Pipettenaufnahme, Segment 1
(2) Pipettenaufnahme, Segment 2
(3) Motor für lineare Bewegung
(4) Motor für 180°-Rotation
Die Flip-Unit nimmt das ausgestochene Die von der Wafer-Folie. Im Flip-Chip-Modus dreht sie
das Die um 180° in die Abholposition des Bestückkopfes. Im Die-Attach-Modus dreht die Flip-Unit
das Die um ca. 130° in die Übergabeposition zur Die-Attach-Unit.
Die Flip-Unit ist mit zwei um 180° entgegengesetzt angeordneten Pipetten ausgestattet. Dies er-
möglicht im Flip-Chip-Modus während des Abholvorgangs des Bestückkopfes die gleichzeitige
Aufnahme eines Dies vom Wafer.
1
3
4
2

Betriebsanleitung SIPLACE CA-Serie 4 SIPLACE Wafer-System (SWS)
Ab Softwareversion SR 708.0 Ausgabe 12/2014 4.3 Beschreibung der SWS-Baugruppen
219
Die Flip-Unit kann sowohl mit Standard-SIPLACE-Pipetten (9xx) als auch mit speziellen Adaptern
für Die-Bonding-Tools arbeiten. Die Dies werden, wie auch bei anderen SIPLACE-Bestückauto-
maten, durch ein Vakuum an die Pipetten angesaugt.
Die Flip-Unit enthält eine Rotationsachse sowie eine von einem Linearmotor angetriebene
Z-Achse. Im optionalen Die-Attach-Modus ist ein weiterer Linearmotor zum Transfer des Dies an
den Die-Attach-Kopf enthalten. Die Rotationsachse ist für die Drehung in 180°-Lage (Flip-Chip-
Modus) bzw. 130°-Lage (Die-Attach-Modus) zuständig. Die Z-Achse bewirkt die Bewegung des
Segments während des Pick-Prozesses. Der optionale Linearmotor im Die-Attach-Modus bewirkt
eine Bewegung des Segments für den Transfer des Dies an den Die-Attach-Kopf.
4.3.3 Wafer-Kamera-System
Die Wafer-Kamera ist auf die Wafer-Oberfläche gerichtet. Das Kamerabild dient dem Visionsys-
tem zur Erkennung des definierten Musters für das zu bestückende Die (auch Referenz-Die), In-
kpunkterkennung (bei Betrieb ohne Wafermap), Berechnung der Die-Position und zur Waferrand-
Erkennung. Nach Positionierung des Wafers auf das nächste auszustechende Die, wird das Visi-
onmodell überprüft und die Position des Dies bestimmt. Bei zu großer Abweichung vom Sollwert
(Toleranz kann definiert werden) wird der Wafertisch erneut positioniert, um die Ausstechposition
zu optimieren.
Die Wafer-Randlagenerkennung ist notwendig um Abweichungen der Waferlage relativ zum Wa-
fer-Rahmen zwischen verschiedenen Wafern des gleichen Typs auszugleichen.
Spezifikation Standard-Kamera-System
Das Standard-Kamera-System wird für Die-Größen von 1 bis 12 mm verwendet.
Das Gesichtsfeld der Kamera beträgt etwa 10,5 x 6,7 mm.
Spezifikation Hochauflösendes-Kamera-System
Das Hochauflösende-Kamera-System ist Teil des Small-Die-Kit und wird für Die-Größen unter
1 mm verwendet.
Das Gesichtsfeld der Kamera beträgt etwa 16,0 x 12,8 mm.
4.3.4 Wafer-Tisch
Der Wafer-Tisch besteht aus einer X-Y-Einheit (Bewegungssystem mit 2 linearen Achsen) und der
Wafer-Aufnahme.
Der Wafer-Tisch bewegt die Wafer-Aufnahme mit dem Wafer zu den benötigten Positionen im Ar-
beitsbereich.