松下BM221维修手册_4E3DA.pdf - 第61页
BM221 维修手 册 4.1 控制系 统图 E3 3MCC-14 -011-D 0 4.1-6 4.1.4 YR Y R obot R 轴 A C 伺服 MR- J2M-70DU -PW 012 YL Y R obot L 轴 AC 伺服 MR- J2M-70DU -PW 012 X X Ro bot 轴 AC 伺服 MR- J2M-70DU -PW 012 H1 吸头 1 上下轴 AC 伺服 MR- J2M-10DU -S012 H…
BM221
维修手册
4.1
控制系统图
E33MCC-14-011-D0
4.1-5
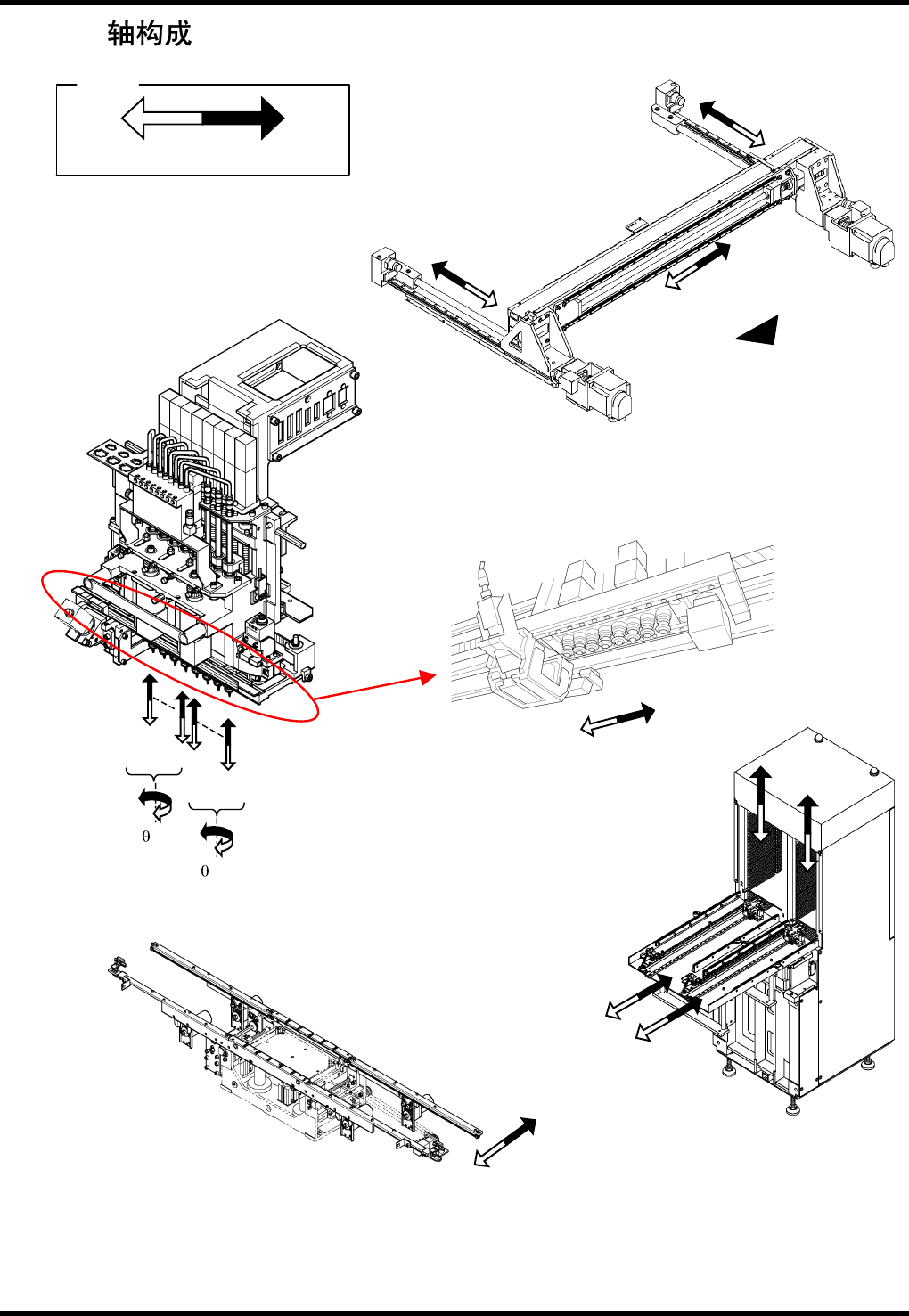
4.1.3
方向
-
(减少)方向
+
(增加)方向
设备前侧
YR
YL
X
R :
选购件
TZA
TZB
TWB
TWA
H5…H8
2
1
H1…H4
S
(选购件)
BM221
维修手册
4.1
控制系统图
E33MCC-14-011-D0
4.1-6
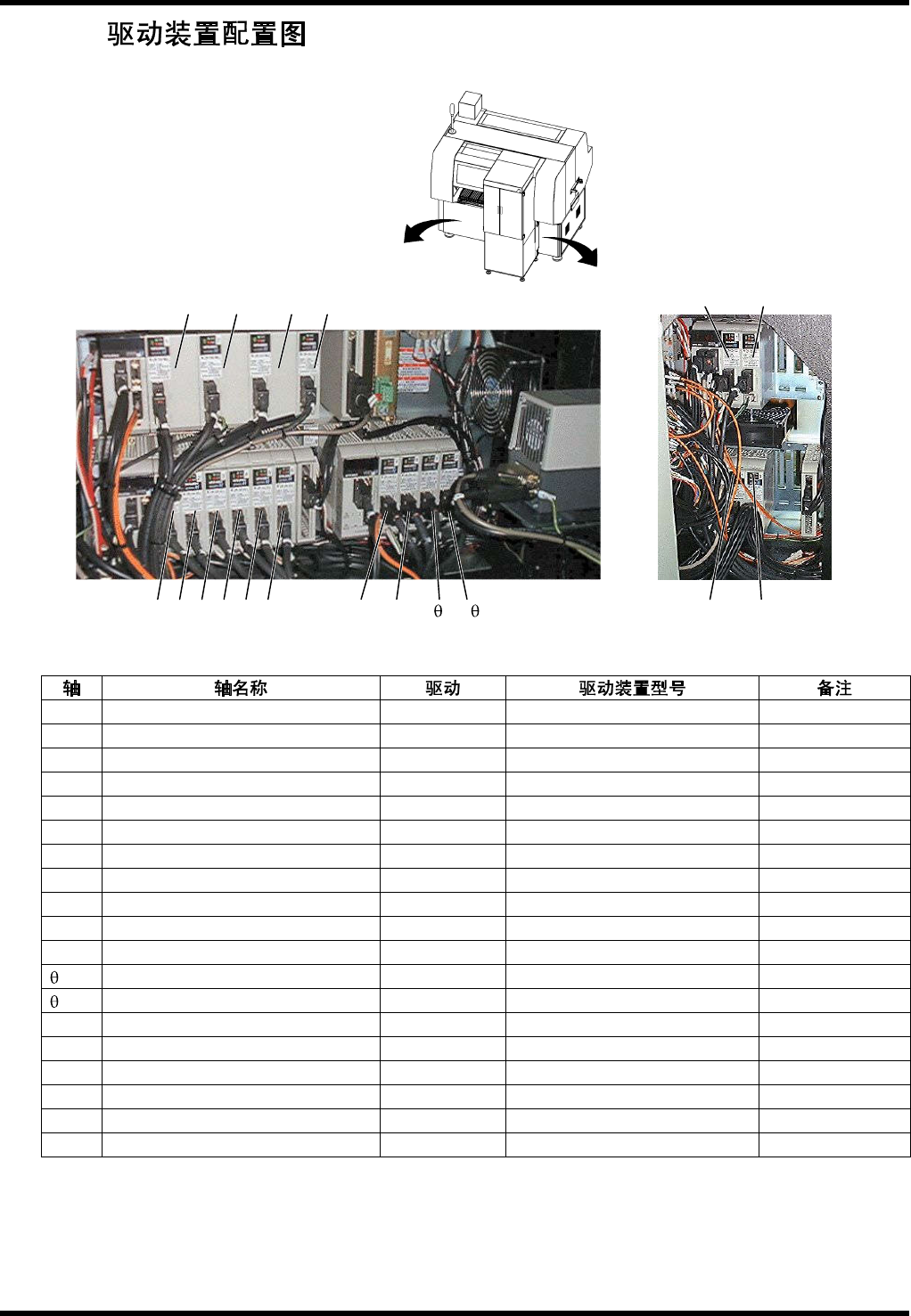
4.1.4
YR
Y Robot R
轴
AC
伺服
MR-J2M-70DU-PW012
YL
Y Robot L
轴
AC
伺服
MR-J2M-70DU-PW012
X
X Robot
轴
AC
伺服
MR-J2M-70DU-PW012
H1
吸头
1
上下轴
AC
伺服
MR-J2M-10DU-S012
H2
吸头
2
上下轴
AC
伺服
MR-J2M-10DU-S012
H3
吸头
3
上下轴
AC
伺服
MR-J2M-10DU-S012
H4
吸头
4
上下轴
AC
伺服
MR-J2M-10DU-S012
H5
吸头
5
上下轴
AC
伺服
MR-J2M-10DU-S012
H6
吸头
6
上下轴
AC
伺服
MR-J2M-10DU-S012
H7
吸头
7
上下轴
AC
伺服
MR-J2M-10DU-S012
H8
吸头
8
上下轴
AC
伺服
MR-J2M-10DU-S012
1
吸头旋转轴
(H1 – H4) AC
伺服
MR-J2M-10DU-S012
2
吸头旋转轴
(H5 – H8) AC
伺服
MR-J2M-10DU-S012
TZA
托盘
A
上下轴
AC
伺服
MR-J2M-40DU-S012
TWA
托盘
A
引出轴
AC
伺服
MR-J2M-10DU-S012
TZB
托盘
B
上下轴
AC
伺服
MR-J2M-40DU-S012
TWB
托盘
B
引出轴
AC
伺服
MR-J2M-10DU-S012
R
搬送导轨宽度调整轴
AC
伺服
MR-J2M-10DU-S012
选购件
S
扫描轴
AC
伺服
MR-J2M-10DU-S012
选购件
H7 H8H1 . . . . . . H6
YR YL X
1 2 S
(选购件)
后部左侧 后部右侧
TZA TWA
TZB TWB
R :
选购件
BM221
维修手册
4.2
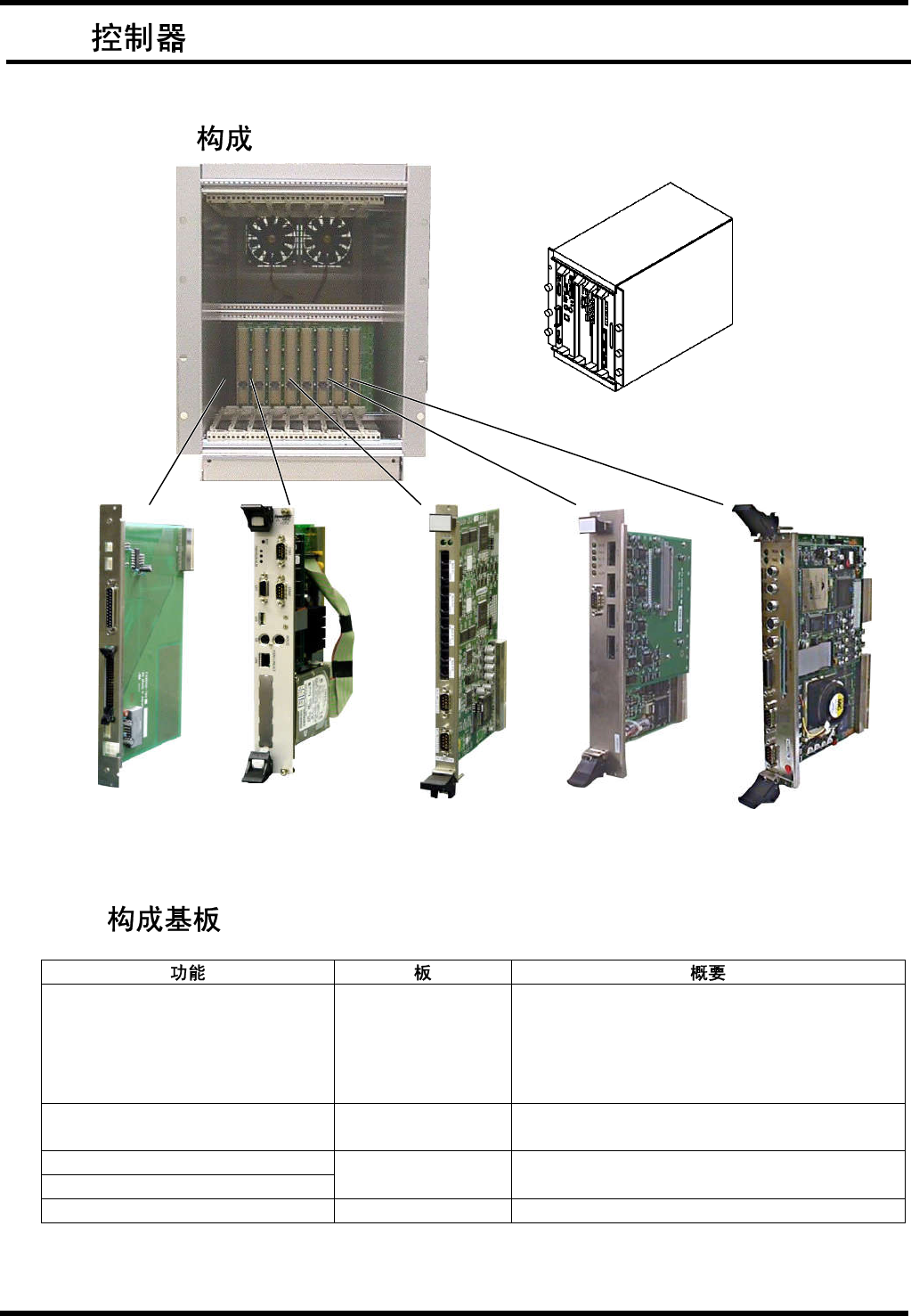
控制器
(P8000)
E33MCC-14-071-B0
4.2-1
4.2. (P8000)
E33MCC-14-071-B0
在本节对该设备的主控制器
P8000
进行说明。
4.2.1 P8000
4.2.2
人机接口
机器控制
HMI
板
FDD-IF
板
各板的控制
画面的控制
FDD
的控制
键盘
/
鼠标的控制
生产数据、机器数据的管理
电机控制
NC
板
和伺服放大器的接口
各轴的控制
供料器控制
I/O
控制
CC
板
供料器的控制
阀、传感器等的
I/O
控制
识别控制
RC
板
各种相机、传感器的控制
FDD IF
板
FA8000-790
HMI
板
NBC-IC4B(M)
NC
板
FA8000-202-4B
CC
板
FS8000-CC2
RC
板
FS8000-RC7-1B
配置
3D
传感器(选购件)时
FS8000-RC8-1C