FX3_MaintenanceManual_Rev1_C.pdf - 第22页
Rev1.00 维修调整要领书 2-3 2-2. 马达的更换 2-2-1 . Z 马达( LNC 贴装头) 更换了 Z 马达之后, 需要进行 Z 轴原点的位置调整,以及 Z 轴高度有关、激光有关的 MS 参数。(输入 项目请参照 2-8 项。) 1 ) 把 Z 电动机扎线从动力插头底部, Z 编码器中转基板中 拆下。 (参照 2-1 项 2 )、 4 )、 5 )、 7 )) 2 ) 先拧松 Z 电动机皮带轮的 ① 小螺钉(× 2 )。…
Rev1.00
维修调整要领书
2-2
7) 从 Z 编码器中转基板中拆下 Z 编码器线。
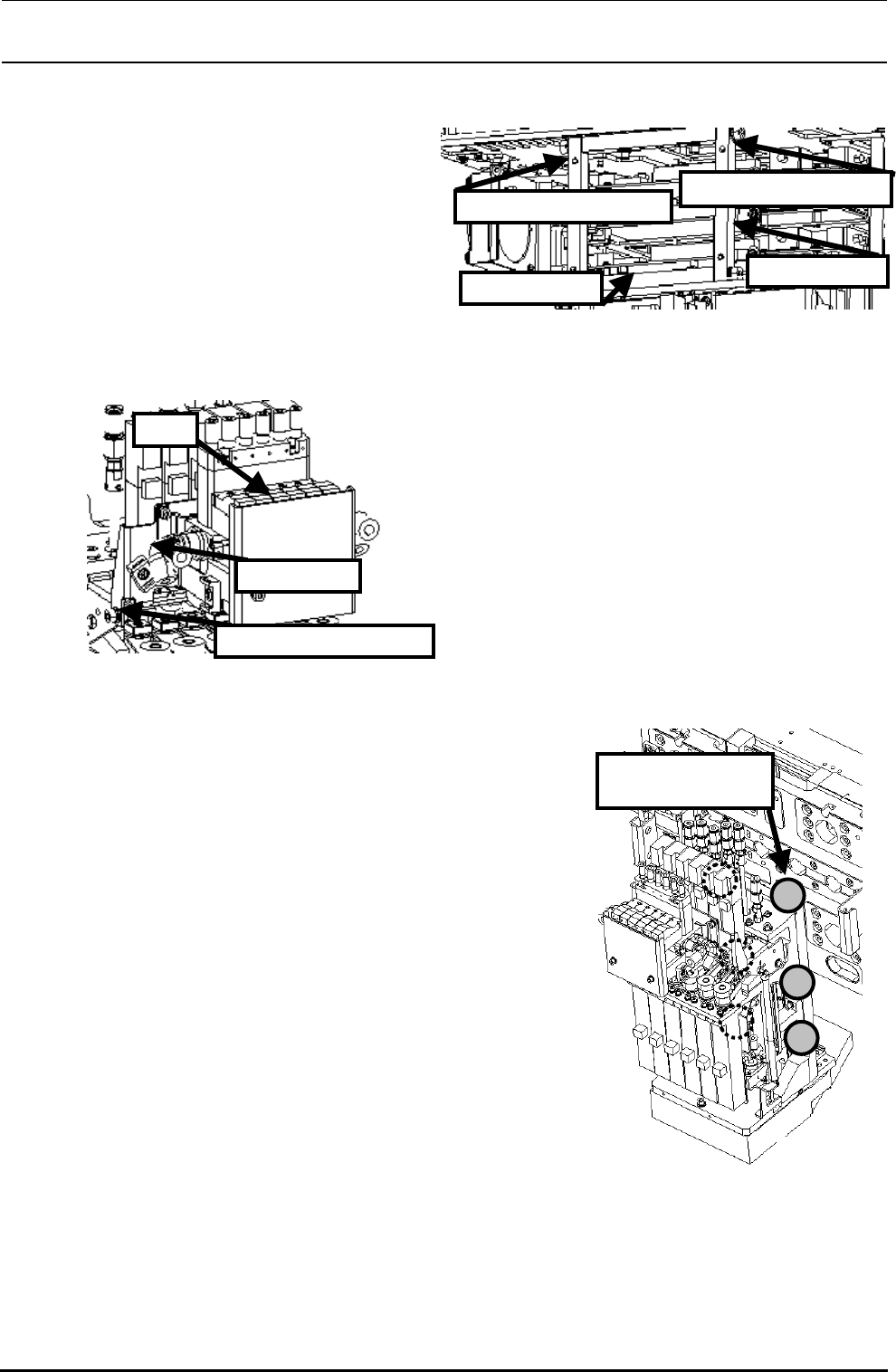
8) 从三张 ZT 驱动基板中只拆下θ电动机的
插头。(共计 12 个)
9) 先拆下⑤带垫片内六角螺钉(×4),再 拆
HTP 杆 B(×2)。
10) 先拆下⑥带垫片内六角螺钉(×2),然 后
拆下最下面的 ZT 驱动支撑装置,拔出θ
电动机线。
11) 拆下 LNC60 的编码器以及 1394 电线。
12) 从贴装头支撑汽缸用连接头 Y 中拆下φ4 的空气
软管。
13) 拆下汽缸。(参照 2-5 项)
14) 先拆下空气软管(6×φ4、4×φ6)、⑦带垫片
内六角螺钉(×4),再拆下 SV 支撑装置 A 和电
磁阀。
15) 为了防止贴装头落下请边用手按住边对⑧带
垫片内六角螺钉
(×6)进行拆卸。请先拔掉 2 个平行销,再把贴装头抬起拆
下,注意不要碰到其他零部件。
16) 装配请按相反的步骤进行。
(图为 LF 贴装头。其他的贴装头也同样进行。)
※ 给贴装头安装螺钉(6 个)涂敷粘结剂 LOCTITE242 后,
请以安装扭矩 7.0Nm 进行固定。
※ 各马达插头请参照位置标签进行连接。
17) 更换贴装头后,需要重新输入 MS 参数。
输入项目请参照 2-8 项。
图 2-1-3 ZT驱动基板部
⑤带垫片内六角螺钉(×4)
HTP 杆 B(×2)
⑥带垫片内六角螺钉(×4)
ZT 驱动支撑装置
图
2
-
1
-
4
电磁阀
⑦带垫片内六角螺钉(×4)
SV 支撑装置 A
电磁阀
图 2-1-5 贴装头装置
⑧ 带垫片内六角螺钉
(×6)
Rev1.00
维修调整要领书
2-3
2-2. 马达的更换
2-2-1. Z马达(LNC贴装头)
更换了Z马达之后,需要进行 Z 轴原点的位置调整,以及 Z 轴高度有关、激光有关的 MS 参数。(输入
项目请参照 2-8 项。)
1) 把 Z 电动机扎线从动力插头底部,Z 编码器中转基板中
拆下。
(参照 2-1 项 2)、4)、5)、7))
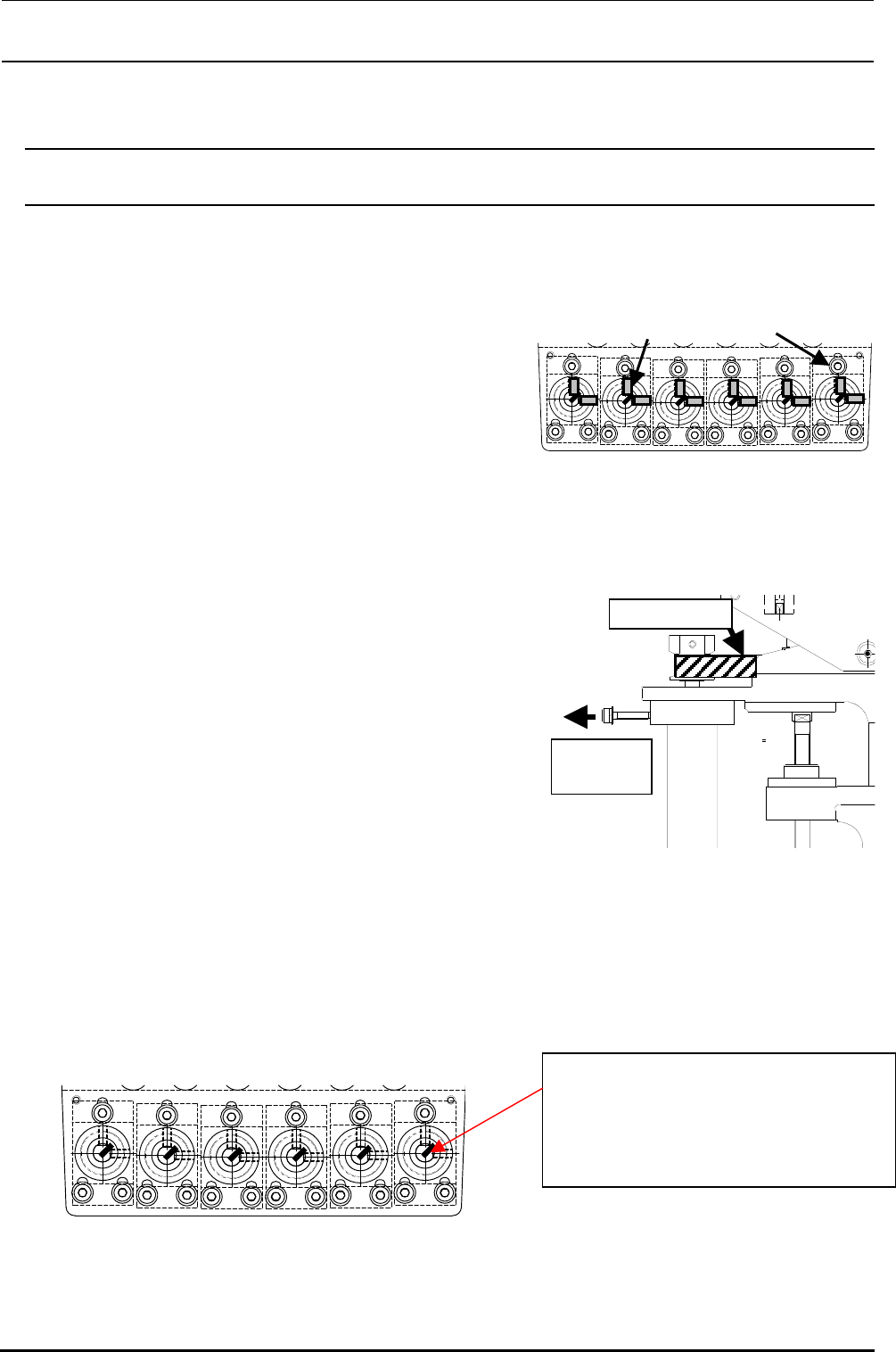
2) 先拧松 Z 电动机皮带轮的①小螺钉(×2)。
3) 先拆下皮带轮安装用的②带垫片内六角螺钉(×3)。然
后再边取出皮带轮边拆卸 Z 电动机。
4) 按照相反的顺序进行安装,最后进行皮带张力的调整。
<皮带张力调整步骤>
① 把螺丝插到 Z 马达的螺丝孔,朝箭头方向用杆张力 21.6N
(2.2kgf)的拉力,用安装螺丝固定。
张力计设置值(设计值)
• 张力计输入值
Weight:0.9g/m、Width:8.0mm、Span:45mm
• 规格值: 10.5±1N
※ 在 Z 马达安装螺丝(3 个)上涂上锁定漆 242 后,拧紧固
定,转矩为 2.3Nm。
※ 固定 Z 马达皮带轮的固定螺丝时,
应注意 Z 马达轴的平部和皮带轮固定螺丝的方向。固定螺丝的紧
固转矩为 0.5Nm。
图 2-2-1-3 Z 电动机皮带轮的组装方法
在将 Z 轴抬到最上面的状态下,如果按
左图所示,在轴标记为 2 点钟方向的位
置或者轴的 D 形切面为图示的位置时将
Z 马达皮带轮固定,即达到 2)项的条件。
图 2-2-1-1 Z电动机组装部
(俯视图)
①
②
图 2-2-1-2 同步皮带 Z
同步皮带 Z
21.6N
(2.2kgf)拉
Rev1.00
维修调整要领书
2-4
② 组装后,请获取 MS 参数的基板上面高度。
如果这一值不在 1~5mm 之间,请重新调整 Z 电动机轴与滚珠螺杆的位置关系,再次取得 MS 参数,
并确认基板上面高度在 1~5mm 之间。
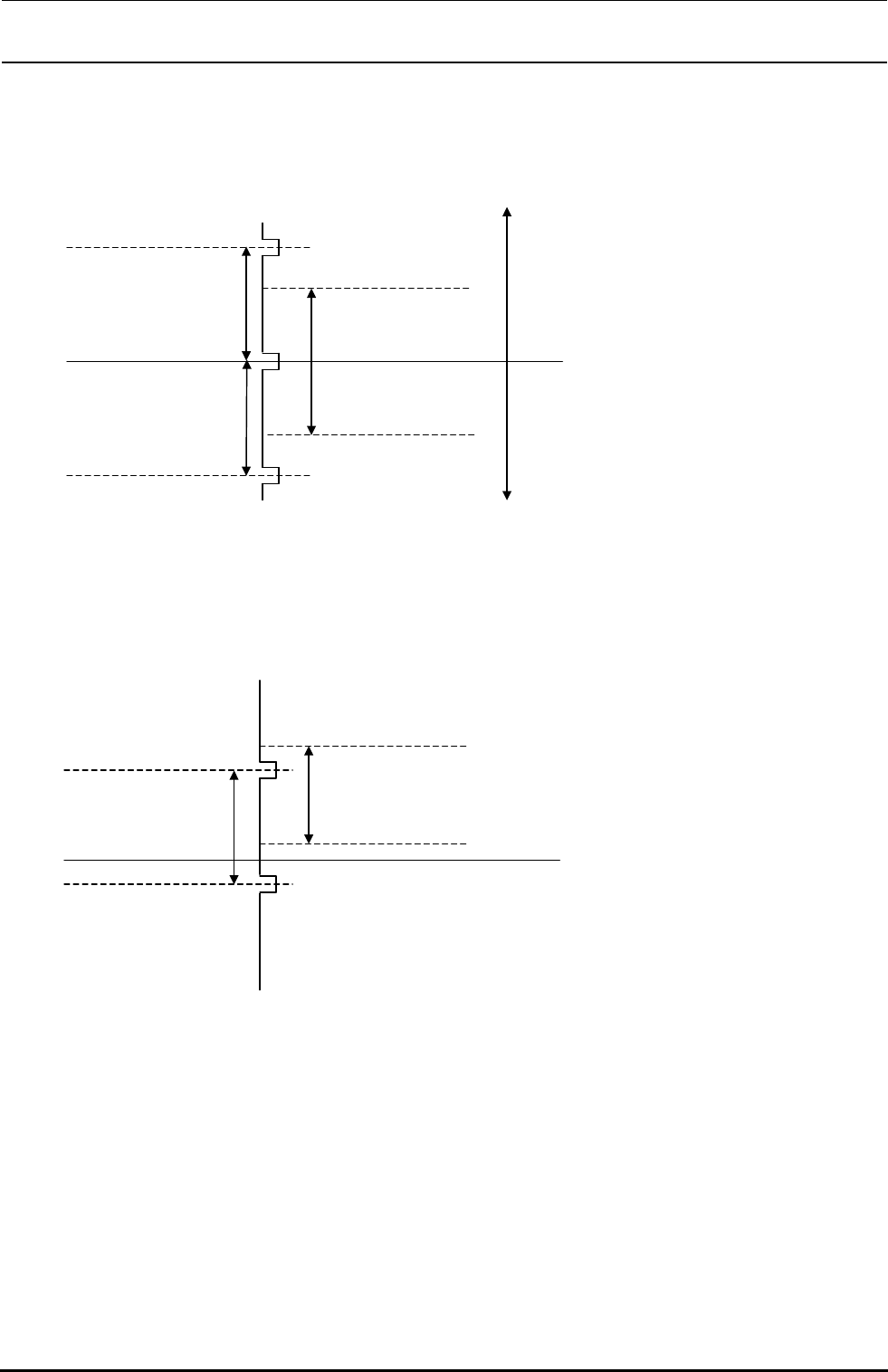
图 2-2-1-4 Z 电动机编码器和 Z 传感器的位置关系
图 2-2-1-5 Z 电动机编码器和 Z 传感器的位置关系
Z 轴球螺丝转动
1 圈的行程: 6mm
Z 传感器 OFF 区域
-2~+2mm 稳定区域
Z 传感器 ON 区域
Z 传感器高度
θ电动机编码器 Z 相信号
Z 传感器高度
1~5mm 稳定区域
Z 传感器 ON 区域
Z 传感器 OFF 区域
Z 轴球螺丝转动
1 圈的行程: 6mm