00195759-0102_UM_D3_SR605_DE.pdf - 第118页
3 Technische Daten des Automaten Betriebsanleitung SIPLACE D3 3.6 Portalsystem Ab Softwareversion SR.605.xx Ausgabe 07/2008 DE 118 3.6 Port alsystem 3.6.1 Lage der Por t ale 3 Abb. 3.6 - 1 Lage der Portale P1 Portal 1 X1…
Betriebsanleitung SIPLACE D3 3 Technische Daten des Automaten
Ab Softwareversion SR.605.xx Ausgabe 07/2008 DE 3.5 Bestückkopf
117
Programmierbare Aufsetzkraft 1,0 N - 15 N
2,0 N - 30 N
d
1,0 N - 15 N
2,0 N - 30 N
d
Pipettentypen 5xx (Standard)
4xx + Adapter
8xx + Adapter
9xx + Adapter
Greifer
5xx (Standard)
4xx + Adapter
8xx + Adapter
9xx + Adapter
Greifer
Pipettenabstand der beiden
Pick&Place Köpfe
70,8 mm 70,8 mm
X/Y-Genauigkeit
e
± 26 μm / 3σ, ± 35 μm / 4σ ± 22 μm / 3σ, ± 30 μm / 4σ
Winkelgenauigkeit ± 0,05° / 3σ, ± 0,07° / 4σ ± 0,05° / 3σ, ± 0,07° / 4σ
BE-Kameratyp 33 25
Beleuchtungsebenen 6 6
Einstellmöglichkeiten der
Beleuchtungsebenen
256
6
256
6
a) Beachten Sie bitte, dass das bestückbare BE-Spektrum auch von den Pad-Geometrien, den kundenspezi-
fischen Standards und den BE-Verpackungstoleranzen beeinflusst wird.
b) Werden C&P Kopf und TwinHead in einem Bestückbereich kombiniert, kommt es zu Einschränkungen der
maximalen Abmessungen.
c) Bei Verwendung von Standardpipetten.
d) SIPLACE High-Force Head, Abschnitt 6.5
, Seite 314.
e) Genauigkeitswert gemessen gemäß herstellerneutralem IPC Standard
3 Technische Daten des Automaten Betriebsanleitung SIPLACE D3
3.6 Portalsystem Ab Softwareversion SR.605.xx Ausgabe 07/2008 DE
118
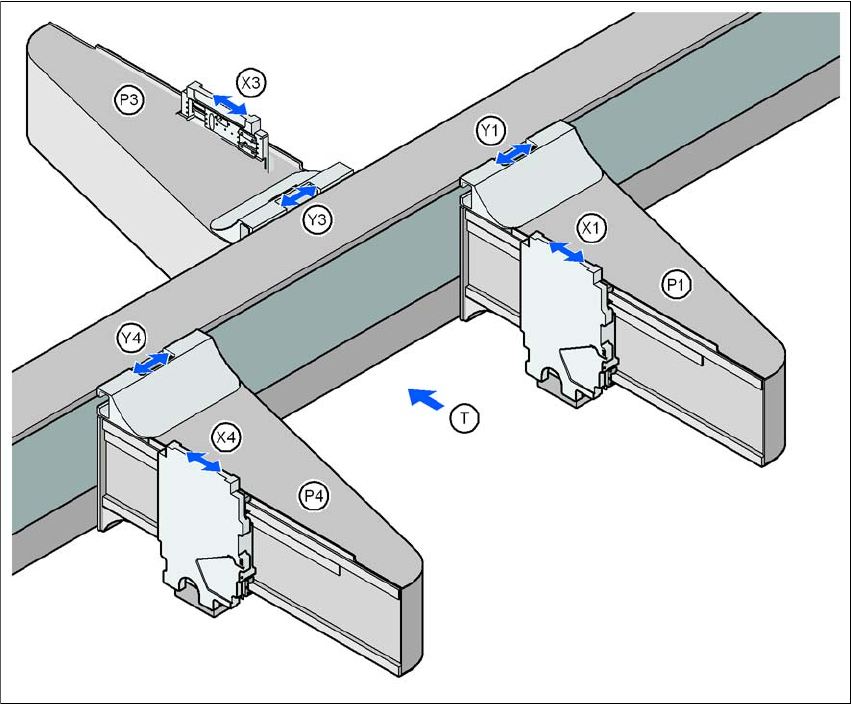
3.6 Portalsystem
3.6.1 Lage der Portale
3
Abb. 3.6 - 1 Lage der Portale
P1 Portal 1
X1 X-Achse, Portal 1
Y1 Y-Achse, Portal 1
P3 Portal 3
X3 X-Achse, Portal 3
Y3 Y-Achse, Portal 3
P4 Portal 4
X4 X-Achse, Portal 4
Y4 Y-Achse, Portal 4
(T) Leiterplatten-Transportrichtung
Bestückbereich 2
Bestückbereich 1
Betriebsanleitung SIPLACE D3 3 Technische Daten des Automaten
Ab Softwareversion SR.605.xx Ausgabe 07/2008 DE 3.6 Portalsystem
119
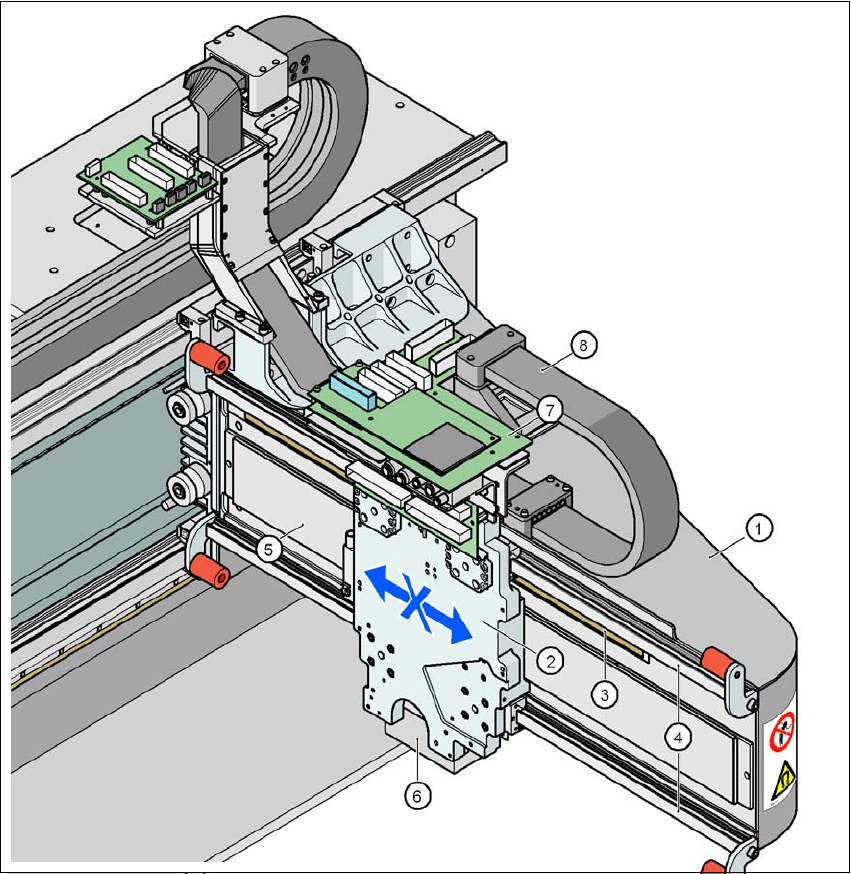
3.6.2 Aufbau der X-Achse
3
Abb. 3.6 - 2 Aufbau der X-Achse
(1) Portalausleger
(2) Kopfhalterung mit X-Linear-Motor (Primärteil)
(3) Lineares Wegmesssystem
(4) Führungssystem
(5) Permanentmagnet (Sekundärteil des X-Linear-Motors)
(6) Unterportal-Kamera
(7) Kopfplatinen
(8) Kabelschlepp