SER04989020_YVL88II Service_J.pdf - 第109页
3- 88 SER04989020 調整 第 3 章 3 q 安全を確認して、再度 [ENTER] キーを押します。 ヘッド 1 がシングル認識カメラ上空に移動し、ビジョンディスプレイに部品が 映し出されます。ノズルが回転して、カメラスケール、位置、角度が 5 回測定 され , 結果が操作ディスプレイの右上に下図のように表示されます。 60443317-00 <<モード>> 3/マシン調整 A377 <&…
3-
87
SER04989020
調整
第
3
章
3
6
「移動量(mm)5」を確認し、[ENTER]キーを押します。
カメラスケールの調整では、軸を動かしながら画像処理を行います。通常、
「移動量(mm)5」が適切です。
7
部品データベース番号を入力して、[ENTER]キーを押します。
準備のときに修正した部品のデータベース登録番号 "6" を入力します。
テープ部品を使用している場合は、引き続いてフィーダーセットNo. 入力画面
が現れますので、テープフィーダーをセットした番号を入力してください。
(この場合、部品は自動吸着されますので Step 8∼10 は省略されます。)
8
安全を確認しながら、[ENTER]キーを2回押します。
ヘッド1 が部品吸着位置(左手前)に移動します。
e
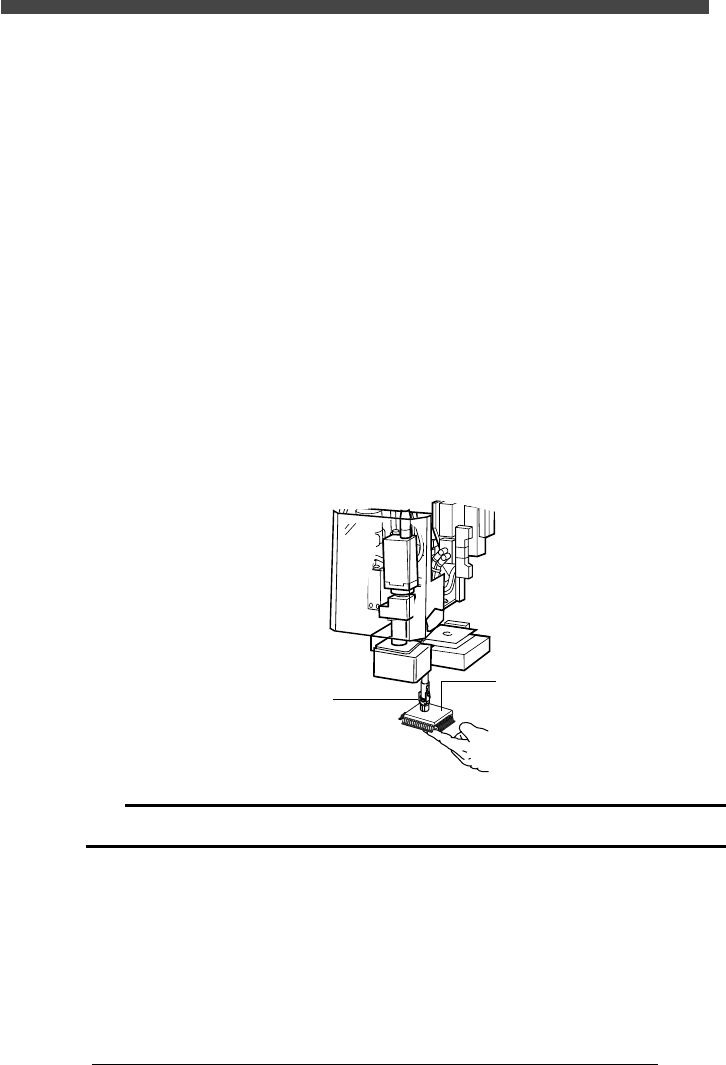
9
非常停止ボタンを押してから、部品をヘッド1に吸着させま
す。
Step 3 の補助調整の終了時に部品を吸着させたままであるなら、このステッ
プは不要です。
■ 部品の吸着
20443316-00
ヘッド1
QFP
c
注意
長方形の部品の場合は、X軸と平行な方向に長い辺を合わせてください。
0
非常停止を解除し、[ENTER]キーを押します。
e
3-
88
SER04989020
調整
第
3
章
3
q
安全を確認して、再度 [ENTER]キーを押します。
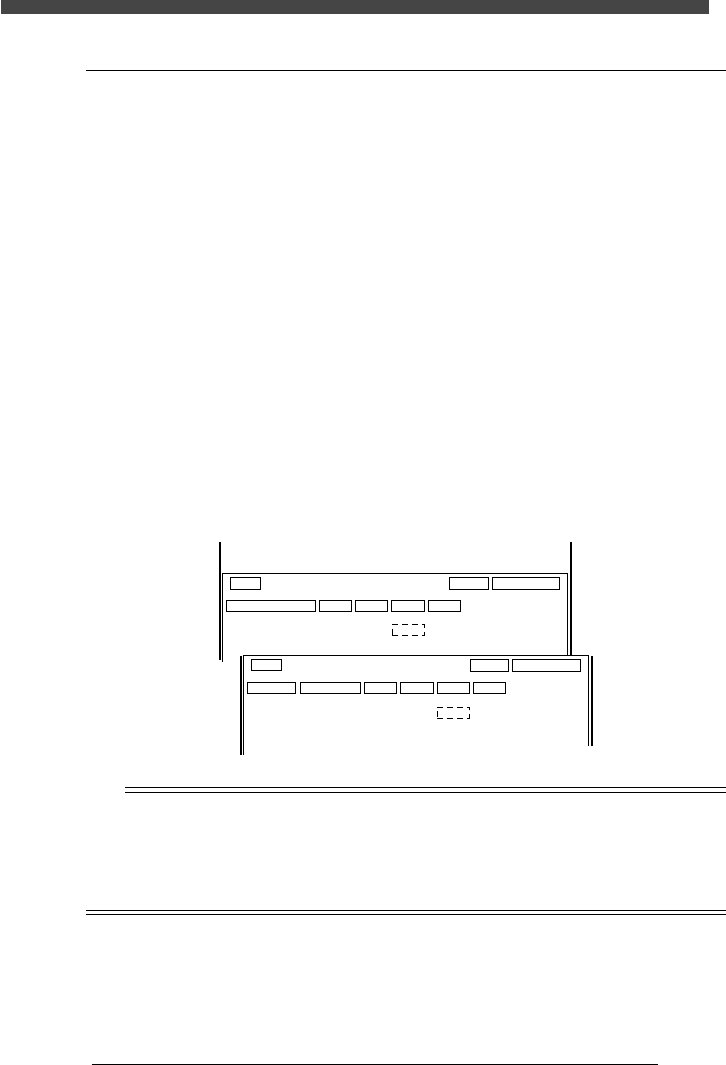
ヘッド1 がシングル認識カメラ上空に移動し、ビジョンディスプレイに部品が
映し出されます。ノズルが回転して、カメラスケール、位置、角度が5 回測定
され, 結果が操作ディスプレイの右上に下図のように表示されます。
60443317-00
<<モード>> 3/マシン調整
A377
<<<結果>>>
カメラスケールの調整結果を表示します。
結果を残したい場合には「ENTER」キーを、
破棄したい場合「ESC」を押してください。
移動距離 =
スケールx
スケールy
カメラ位置x
カメラ位置y
カメラ角度r
スケール比
=
=
=
=
=
=
xxx.xx
yy.yy
x.xxxx
y.yyyy
r.rrrr
nn.nn
カメラ番号=1
5.00
参考
表示結果の「カメラ位置 x」と「カメラ位置 y」は、カメラスケール調整の前に設定されていたカ
メラ位置座標との差を示しています。調整前の位置座標が正確であったならば、これらはゼロに近
い値となります。一方、正確でなかったときは、ゼロから離れた値となります。(もう一度カメラ
スケール調整を行うと、「カメラ位置 x」と「カメラ位置 y」ともゼロに近い値を示すはずで
す。)
w
結果を残したい場合は[ENTER]キーを押します。
結果を破棄したい場合は[ESC]キーを押してください。
e
調整が終了したら、部品の廃棄に移ります。
部品の自動廃棄をする場合は[ENTER]キーを押してください。
自動廃却動作をしたくない場合は、[ESC]キーを押して強制終了させ、操作
ディスプレイの指示に従ってください。
r
調整データを保存します。
「B2 調整後データ保存」または「B0 データ保存後終了」を選択実行してくだ
さい。(保存したくない場合は、「B3 調整前データ復活」または「B7 強制終
了」を選択実行してください。)
t
修正したデータを元に戻します。
Step 2 で修正した「リード検出範囲」などを必要に応じて元に戻してくださ
い。修正したデータをそのまま保存しておきたい場合は、適当なコメントを入
れておくことをお勧めします。
3-
89
SER04989020
調整
第
3
章
3
3.3 レーザーユニット
部品認識用のレーザーユニットに関する調整を説明します。マシン調整モードの
「レーザーユニット」ユーティリティーを使って、下記の 2 項目を調整します。
・レーザー認識高さ
レーザーユニットで部品を認識するときのノズルの基準高さです。
ノズルを上下させながら、レーザースキャンして求めます。
・ノズル位置
レーザーユニットが部品位置を検出した後に、ノズルからのズレ量を算出する
ための基準となるノズルの中心位置です。ノズルを回転させながら、レーザー
スキャンして求めます。
上記のユーティリティーを実行するとノズル位置に関する設定値が自動的に変更
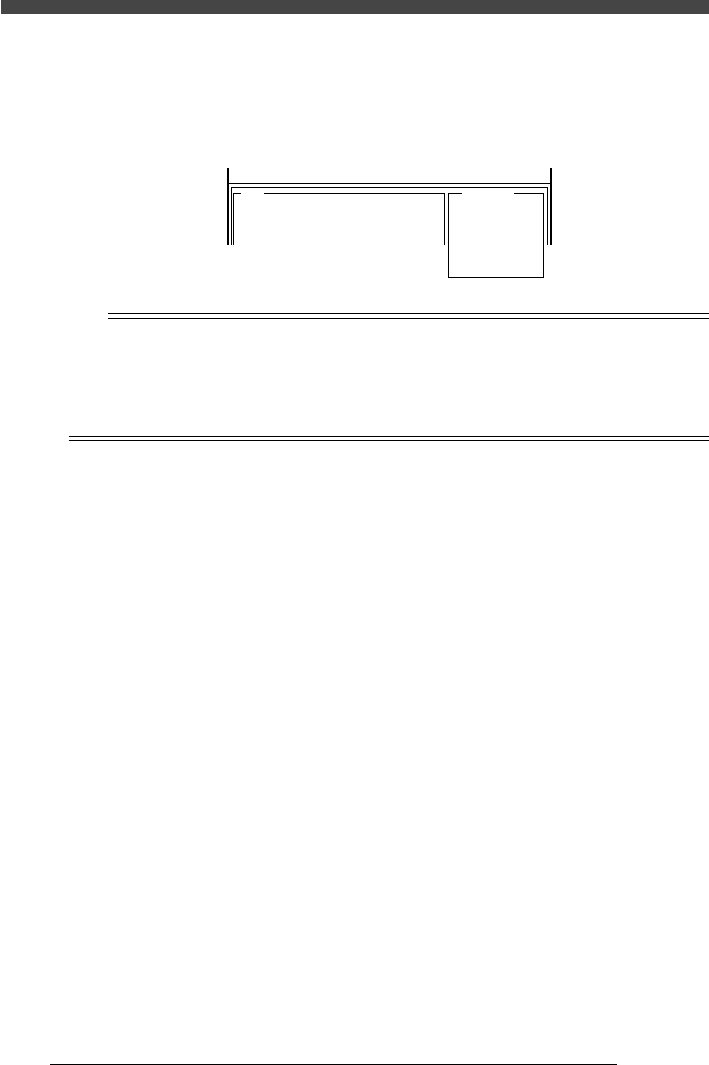
されます。それぞれの設定値は、下図に示すように、マシンデータ編集モードの
「画像処理パラメータ」および「ヘッドオフセット」画面で確認できます。
■ レーザー認識高さとノズル位置に関する設定値
60443321-00
対象名
Y
画像処理パラメータ
レーザーノズル中心
レーザー認識位置
移動カメラスケール (ミクロン)
XZR
編集中
205.09
0.01
123.29
30.25
205.84
10.31
123.63
10.35
編集対象
<<<アプリケーション>>> 3/メンテナンス/M
<<モード>> 2/マシンデータ編集
Y
ヘッド 1
ヘッド 2
ヘッド 3
XZ
ノズル
タイプ31
タイプ31
タイプ31
0.00
0.95
0.00
0.00
12.00
0.00
自動ノズル交換
自動ノズル交換
なし
ヘッド種類
0.00
25.00
0.00
ヘッド番号
編集中
編集対象ヘッドオフセット
n
要点
ノズル位置:画像処理パラメータ編集画面で、「レーザーノズル中心」の「X」と「Z」がヘッド1
のノズル位置(XY)、「Y」と「R」はヘッド2のノズル位置(XY)を示します。
レーザー認識高さ:「レーザー認識位置」の「Z」がヘッド1のレーザー認識高さを示ます。ヘッド
2のレーザー認識高さは、ヘッド1に対する高さとして、ヘッドオフセット編集画面の「Z」に入力
されています。