SER04989020_YVL88II Service_J.pdf - 第158页
3- 137 SER04989020 調整 第 3 章 6 5 ソフトリミット画面を開き、R 軸の初期位値をティーチングし ます。 1. 「 3/3/B1 調整項目選択」→「ソフトリミット」を選択実行します。 2 . 矢印キーを使って、カーソルを対称ヘッド(例えば「 R1/MAIN」 )の「初 期位置」に合わせます。 3. [F10]キ ー を 2 回押して、ティーチングを実行します。 0 ■ R 軸初期移動の設定画面 60443623…
3-
136
SER04989020
調整
第
3
章
6
6.4.2 R軸初期位置の設定
部品の吸着は通常0 度で実行しますので、ノズルが部品の方向と合うように(ノ
ズルホルダーの板バネがX 軸と平行になるように)、R 軸の初期位置を設定しま
す。
1
対象ノズル(例えばタイプ31)をヘッドに取り付けます。
安全を確認してから、「3/ マシン調整」または「4/ 手動」モードのノズル
チェンジを実行してください。
w
警告
ノズルチェンジを実行すると、ヘッド部が高速でノズルステーションに移動します。軸可動範囲に
体の一部などを絶対に入れないようにしてください。(指定ノズルがすでに付いている場合は、移動
しません。)
e
2
非常停止ボタンを押します。
3
ヘッド先端のノズルホルダーの板バネがX 軸と平行になってい
るか確認します。
X 軸と平行でない場合は、ノズルシャフトを回して調整してください。(R 軸ベ
ルトを手で動かすと容易に調整できます。)
4
ティーチングの実行条件を設定します。
1.「3/3/B4 ティーチング実行条件」を選択実行します。
2. ティーチングユニットを選択します。
R1 軸を設定する場合は「ヘッド 1」、R2 軸を設定する場合は「ヘッド2」
を選択してください。
3. 運転速度を選択します。
「スピード1」∼「スピード5」のどれでもかまいません。
3-
137
SER04989020
調整
第
3
章
6
5
ソフトリミット画面を開き、R 軸の初期位値をティーチングし
ます。
1.「3/3/B1 調整項目選択」→「ソフトリミット」を選択実行します。
2. 矢印キーを使って、カーソルを対称ヘッド(例えば「R1/MAIN」)の「初
期位置」に合わせます。
3. [F10]キーを2 回押して、ティーチングを実行します。
0
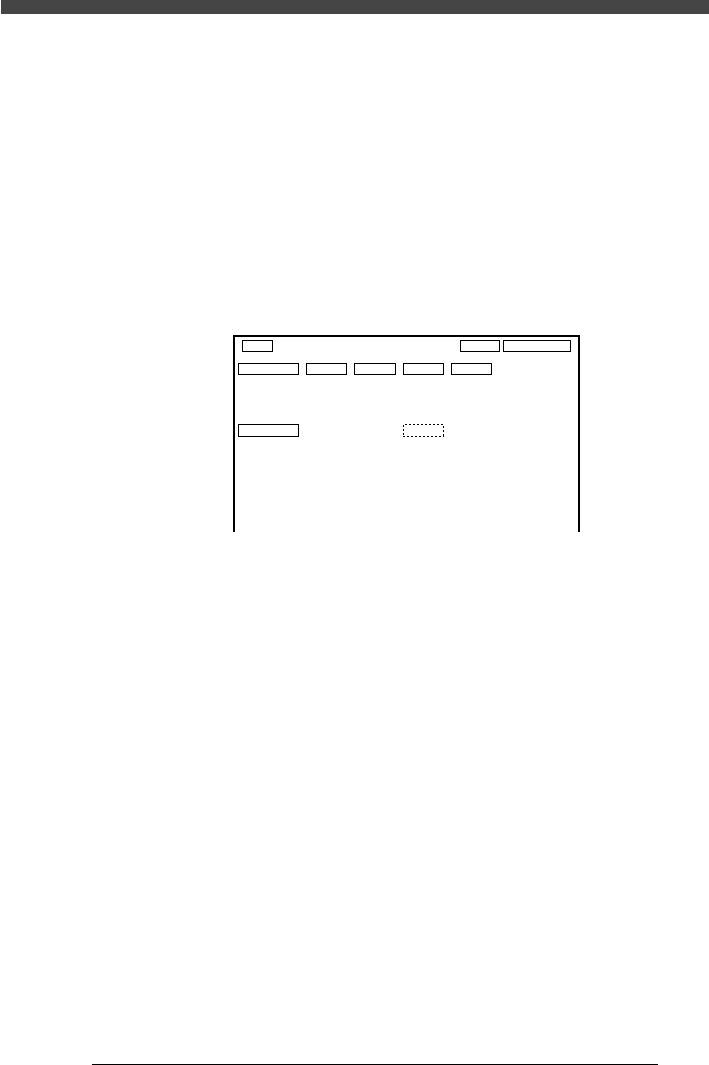
■ R 軸初期移動の設定画面
60443623-00
軸
プラス方向
-360.00
-360.00
360.00
360.00
マイナス方向 初期位置 初期移動
R1/MAIN
R2/MAIN
ソフトリミット
編集中
編集対象
138.00
138.00
6
他方のヘッドに対しても同様にR 軸の初期位値を設定します。
7
調整データを保存します。
[ESC]キーを押してから、「B2 調整後データ保存」または「B0 データ保存後
終了」を選択実行してください。(保存したくない場合は、「B3 調整前データ
復活」または「B7 強制終了」を選択してください。)
3-
138
SER04989020
調整
第
3
章
7
7. 実装調整
搭載精度に関係する種々の調整が完了した後に、部品を基板に試搭載させなが
ら、最終的な仕上げ調整を行います。
YVL88
II
では、部品認識にシングル認識カメラ(ビジョン認識)とレーザーユ
ニットの両方を使用しています。それぞれの認識装置での部品搭載結果に基づい
て、「3/3 マシン調整」モードの「搭載フィードバック」を使って、実装調整し
ます。
7.1 搭載フィードバックのモードについて
YVL88
II
の 搭載フィードバック には、使用する認識装置や調整するパラメー
タに応じて下図の選択モードがあります。(各パラメーターの詳細については次
ページをご覧ください。)
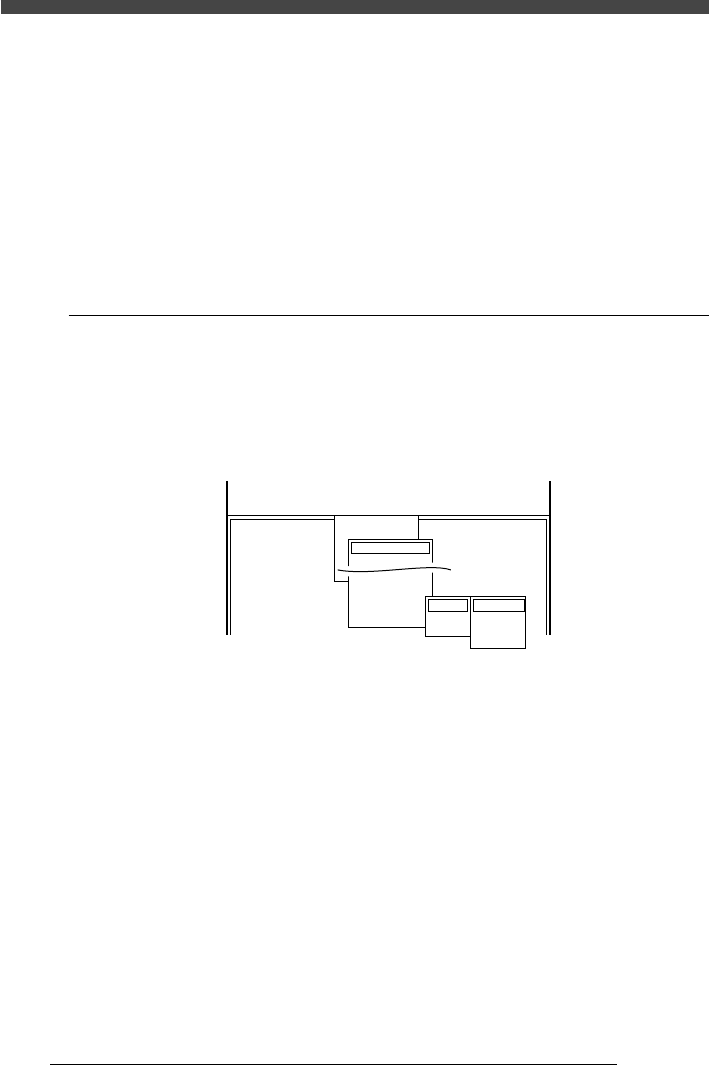
■ 搭載フィードバック選択画面
60443701-00
<<<アプリケーション>>> 3/メンテナンス/M
<<モード>> 3/マシン調整
<コマンドリスト> B/ファイル操作
B1 調整項目選択
調整・検索対象
搭載フィードバック
認識装置
ビジョン
レーザー
調整対象
全体の傾き
X,Y位置ずれ
角度の補正