SER04989020_YVL88II Service_J.pdf - 第170页
3- 149 SER04989020 調整 第 3 章 7 7.2.3 搭載実行( FINE モード) 前述の準備が完了したら、 自動運転モードで部品の試搭載を行います。 ( 自動運 転の詳細は、マウンターのオペレーションマニュアルをご覧ください。 ) 1 安全を確認して、非常停止状態を解除します。 非常停止ボタンを回転解除し、Y P U の [READY] ボタンを押してください。 e 2 自動運転での基板を指定します。 「 1/1/…
3-
148
SER04989020
調整
第
3
章
7
7
「機械座標」の「FINE 角度」を確認します。
FINEモードでの搭載を行う場合には、部品を認識するときの角度の収束範囲
を示す「FINE角度」を設定します。
1.「3/2/A1 編集ファイル切替」を選択実行します。
2.「機械座標」を選択実行し、編集カーソルを「FINE角度」に合わせます。
3. [SPACE]、[INS] または [DEL]キーを押して、「FINE角度」を “0.02” に設
定します。
c
n
要点
より小さな角度を指定すると角度精度は向上しますが、収束せずに部品を廃却したり、収束までに
時間がかかりサイクルタイムに影響する場合があります。
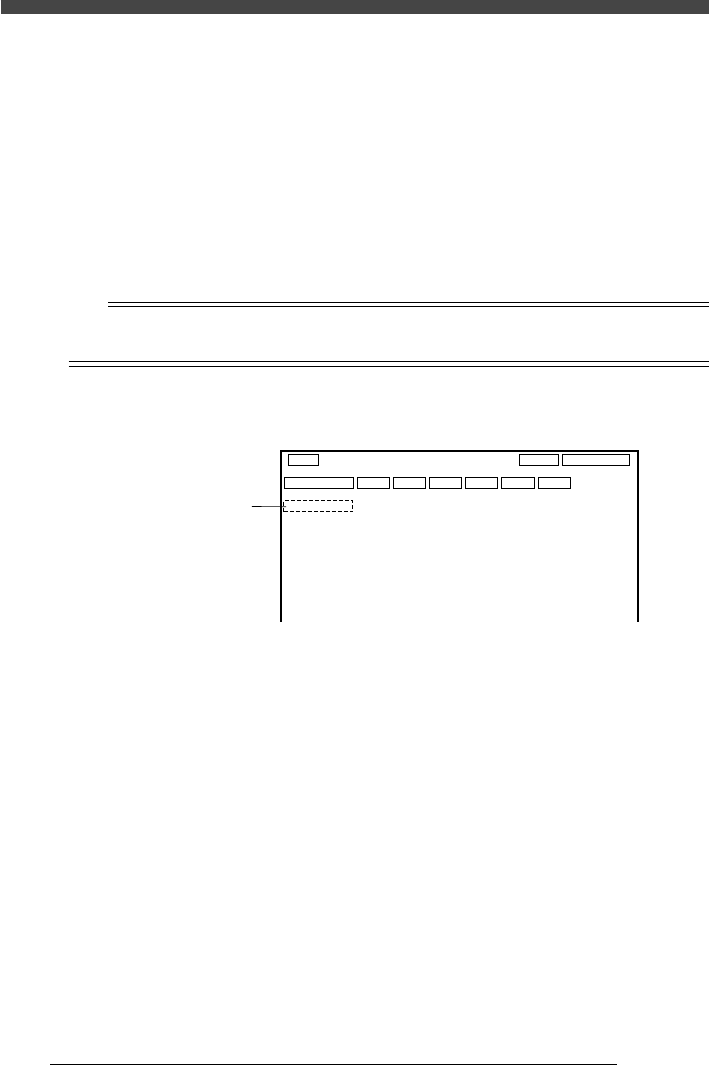
■ 機械座標の編集画面
60443102-00
対象名
X
機械座標
ビームセンサー
FINE角度
リード浮き検出 1
リード浮き検出 2
ロケートピン基準
基板外形基準
待機位置
廃棄位置
基板面/固定トレイ
リファレンスマーカー高さ
同時吸着範囲
YZ
編集中
0.00
-5.00
30.00
52.27
0.00
0.50
0.00
0.00
0.00
194.63
194.63
400.00
250.21
0.20
0.00
0.00
0.00
161.26
161.26
400.00
79.85
0.20
R
フィーダー
0.00
0.00
0.00
52.27
1.00
100
種類
0.02
編集対象
このパラメーターを
確認する
8
マシンデータを保存します。
[ESC]キーを押してから、「A/0 保存、終了」を選択実行してください。
e
9
非常停止ボタンを押してから、コンベアユニットを調整しま
す。
基板に合わせて、ロケートピンやプッシュアップを調整してください。
0
用意した基板に部品固定用の両面テープを貼ります。
3-
149
SER04989020
調整
第
3
章
7
7.2.3 搭載実行(FINEモード)
前述の準備が完了したら、自動運転モードで部品の試搭載を行います。 (自動運
転の詳細は、マウンターのオペレーションマニュアルをご覧ください。)
1
安全を確認して、非常停止状態を解除します。
非常停止ボタンを回転解除し、YPU の[READY]ボタンを押してください。
e
2
自動運転での基板を指定します。
「1/1/D3 生産基板切替」を選択実行して、基板名「CUK_92001_1」を指定
してください。(最初の基板選択では、途中のコマンドは省略されます。)
準備の際に基板データを「1/2 データ情報」モードで修正した場合は、基板
選択は省略できます。 (ただし、「1/ 自動運転」モードに入ったときに運転モ
ニター表示が「リセット状態」でない場合は、「E/ 中止終了」→「E2 リセッ
ト」を実行して修正データを更新する必要があります。)
3
自動運転で基板に部品を搭載します。
「A/ 運転コマンド」→「A2 自動運転」を選択実行してください。
自動運転中にQFP を手でヘッド 1 に吸着させる方法は、下記の「要点」の手
順に従ってください。
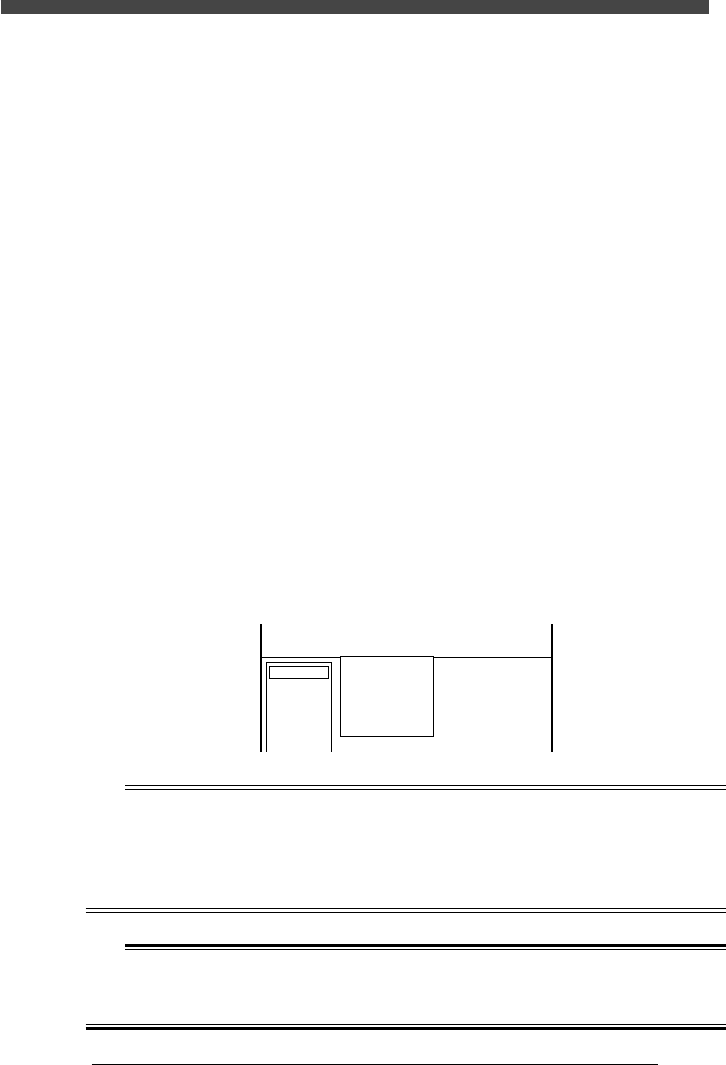
g
60443714-00
<<モード>> 1/自動運転
A/運転コマンド
A2 自動運転 (RUN)
運転モニター
自動運転中
<コマンドリスト>
n
要点
トレイチェンジャーを使用しないときは、次のように手でQFPをヘッド1に取り付けてください。
1. 自動運転でヘッド1が吸着ポイント(準備の時に指定したフィーダーセット番号の位置)の真上
に移動したときに、YPUの[STOP]キーを押して、ヘッド部を一時停止させます。
2. 手でQFPをヘッド1に取り付けます。
3. YPUの[RUN]キーを押して自動運転が再開し、部品を基板に搭載します。
w
警告
QFPを手で取り付けるときに、不用意にYPUの[RUN]キーを押さないように十分注意してください。
ヘッド部が動き始めますので危険です。また、QFPを取り付けてYPUの[RUN]キーを押す前に、安全
を確かめてください。
3-
150
SER04989020
調整
第
3
章
7
7.2.4 搭載フィードバック(FINEモード)
部品を搭載したら、実装状態を評価し、その結果に基づいて「搭載フィードバッ
ク」ユーティリティで微調整をします。
1
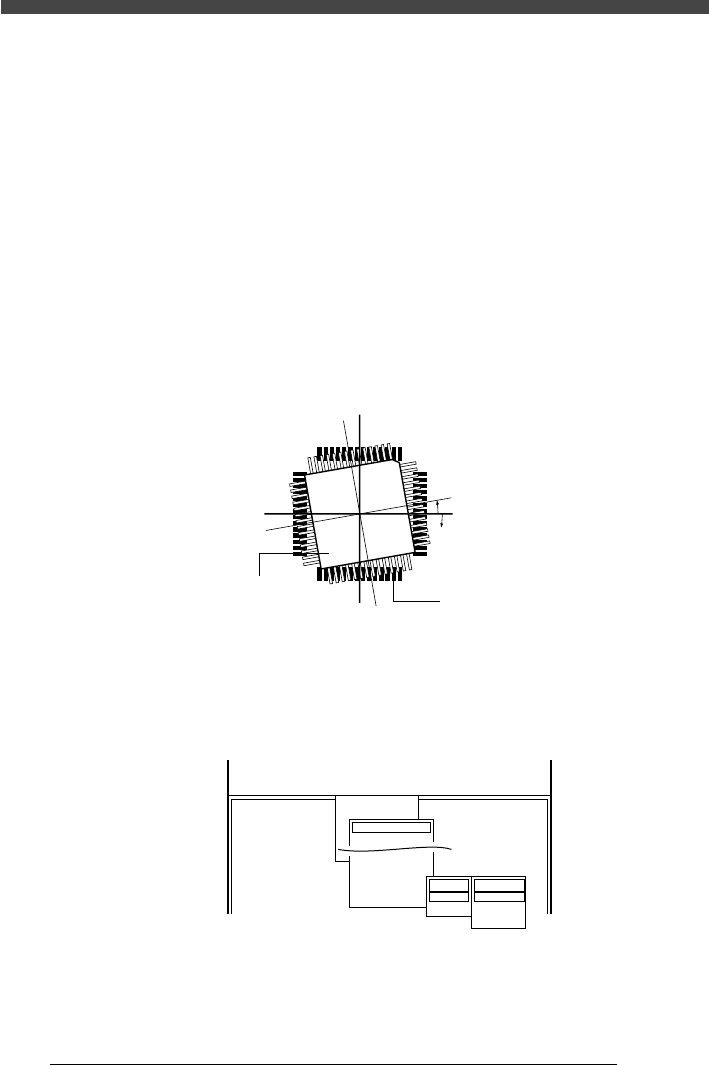
最初に、R 方向のズレ量を調べます。
QFP の四隅に注目して、ランドパターンとの傾き角度を調べてください。
(XY 方向のズレと混同しないよう注意してください。)
目視では実装状態の評価が難しい場合、拡大鏡で観察してください。あるい
は、基板をコンベアに固定して、移動カメラで拡大された映像を観察してくだ
さい。
QFP が反時計回りにズレている場合:+ 値の傾き
QFP が時計回りにズレている場合 :- 値の傾き
■ R 方向ズレとランドパターンの関係
20443715-00
R+
R-
ランドパターン
QFP
2
「搭載フィードバック」を実行します。
1.「3/3/B1 調整項目選択」→「搭載フィードバック」を選択実行します。
2.「ビジョン」→「全体の傾き」を選択します。
60443716-00
<<<アプリケーション>>> 3/メンテナンス/M
<<モード>> 3/マシン調整
<コマンドリスト> B/ファイル操作
B1 調整項目選択
調整・検索対象
搭載フィードバック
認識装置
ビジョン
レーザー
調整対象
全体の傾き
X,Y位置ずれ
角度の補正