SER04989020_YVL88II Service_J.pdf - 第176页
3- 155 SER04989020 調整 第 3 章 7 7.2.6 搭載フィードバック(Q F P モード) 部品搭載した結果を評価し、それに基づいて「搭載フィードバック」ユーティリ ティで微調整します。ここでは、R 方向のズレ量(傾き角度) だけを微調整しま す。 ( FINE モードでの調整を完了すれば、X Y 方向の搭載ズレは起こりませ ん。 ) 1 R 方向のズレ量を評価します。 Q F P の四隅に注目して、ランドパターン…
3-
154
SER04989020
調整
第
3
章
7
7.2.5 搭載実行(QFP モード)
「FINEモード」装着での調整が完了したら、「QFP モード」での部品を搭載し
ます。手順は「FINEモード」と同じですが、基板データを下記のように変更し
てから部品搭載してください。
1
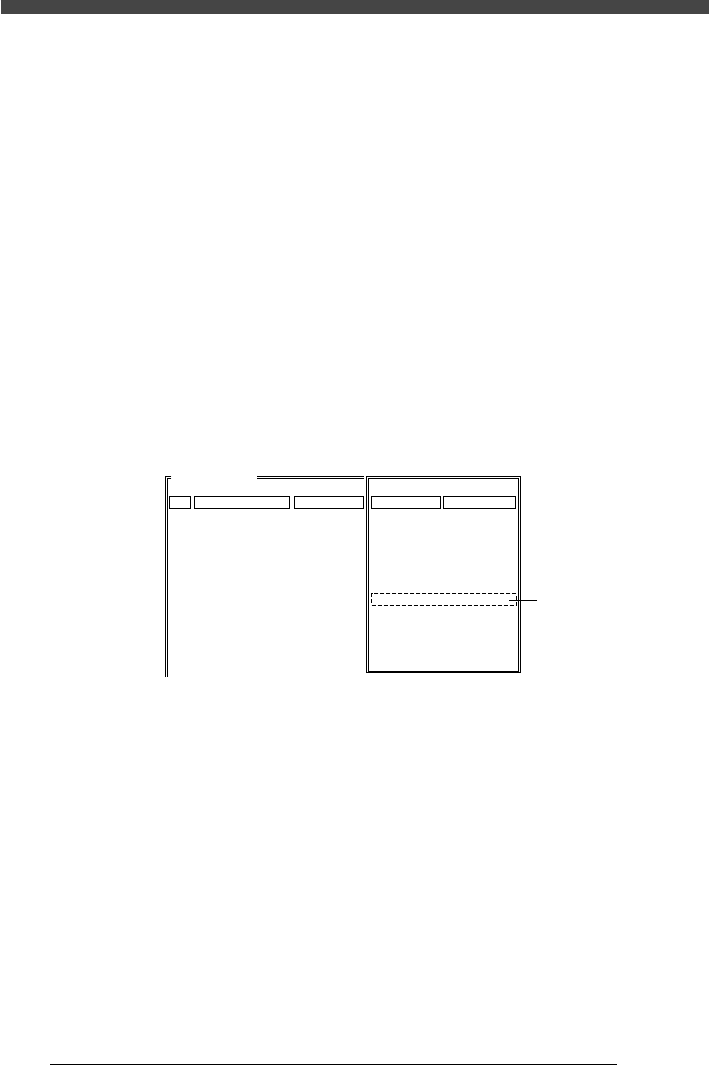
装着動作を「QFP タイプ」に設定します。
1.「2/1/D1 基板データ切替」を選択実行します。
2. 基板名「CUK_92001_1」→「部品情報」選択します。
3. 対象部品 (No. 10) のサブ画面「吸装着情報」を開きます。
カーソルを対象部品に合わせ、[TAB]キー、[F4]キーを押して、サブ画面を
「吸装着情報」に切り替えてください。
4k
4.「装着動作」を「QFP タイプ」に設定します。
60443721-00
基板
編集
編集項目
吸装着情報
:
:
1
2
3
4
5
6
7
8
9
10
11
12
13
14
<<<アプリケーション>>> 2/データ/M
<<モード>> 1/データ編集
:
:
CUK_92001_1
部品情報
No.
部品名 コメント
QFPタイプ
QFP208-p0.50
装着動作
QFPタイプに
設定する
2
修正データを保存します。
[ESC]キーを2回押してから、「D0 基板データ保存、終了」を選択実行してく
ださい。
3
自動運転での基板を指定し、部品を搭載します。
「FINE モード」と同じように搭載実行してください。
3-
155
SER04989020
調整
第
3
章
7
7.2.6 搭載フィードバック(QFP モード)
部品搭載した結果を評価し、それに基づいて「搭載フィードバック」ユーティリ
ティで微調整します。ここでは、R 方向のズレ量(傾き角度)だけを微調整しま
す。(FINE モードでの調整を完了すれば、XY 方向の搭載ズレは起こりませ
ん。)
1
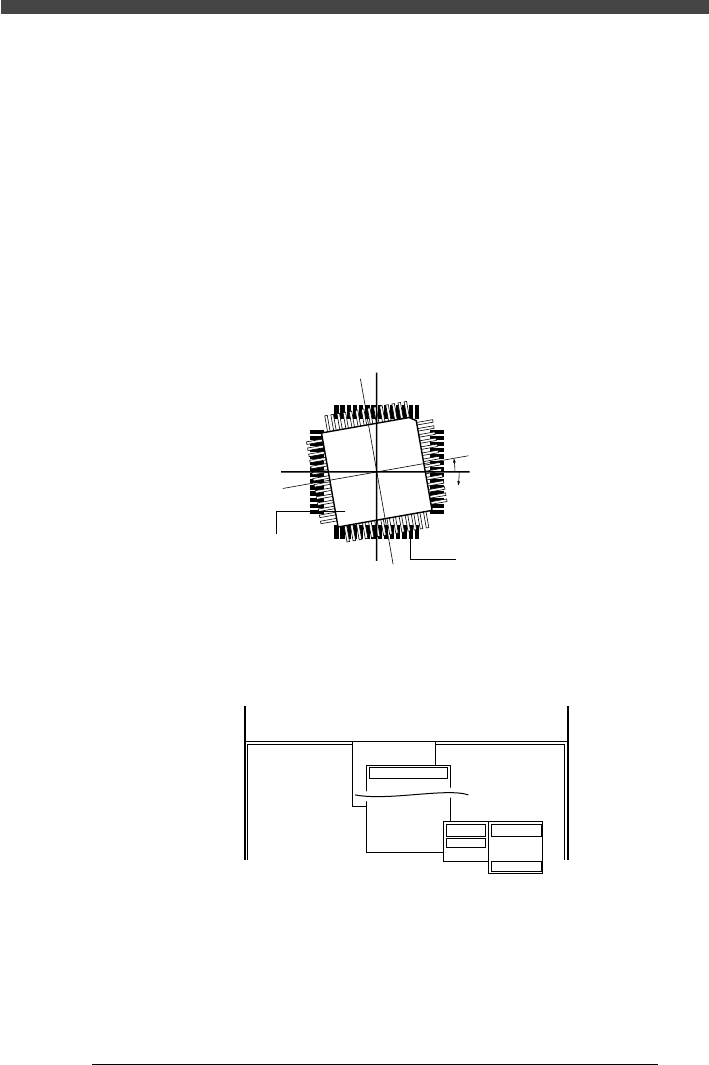
R 方向のズレ量を評価します。
QFP の四隅に注目して、ランドパターンとの傾き角度を求めてください。
反時計回りに傾いている場合:+ 値の傾き
時計回りに傾いている場合 :- 値の傾き
■ 傾き角度とランドパターンの関係
20443715-00
R+
R-
ランドパターン
QFP
2
「搭載フィードバック」を実行します。
「搭載フィードバック」→「ビジョン」→「角度の補正」を選択実行してくだ
さい。
6043722-00
<<<アプリケーション>>> 3/メンテナンス/M
<<モード>> 3/マシン調整
<コマンドリスト> B/ファイル操作
B1 調整項目選択
調整・検索対象
搭載フィードバック
認識装置
ビジョン
レーザー
調整対象
全体の傾き
X,Y位置ずれ
角度の補正
3-
156
SER04989020
調整
第
3
章
7
3
[ENTER]キーを押して、次のステップに進みます。
調整を中止したい場合は、[ESC]キーを押してください。
4
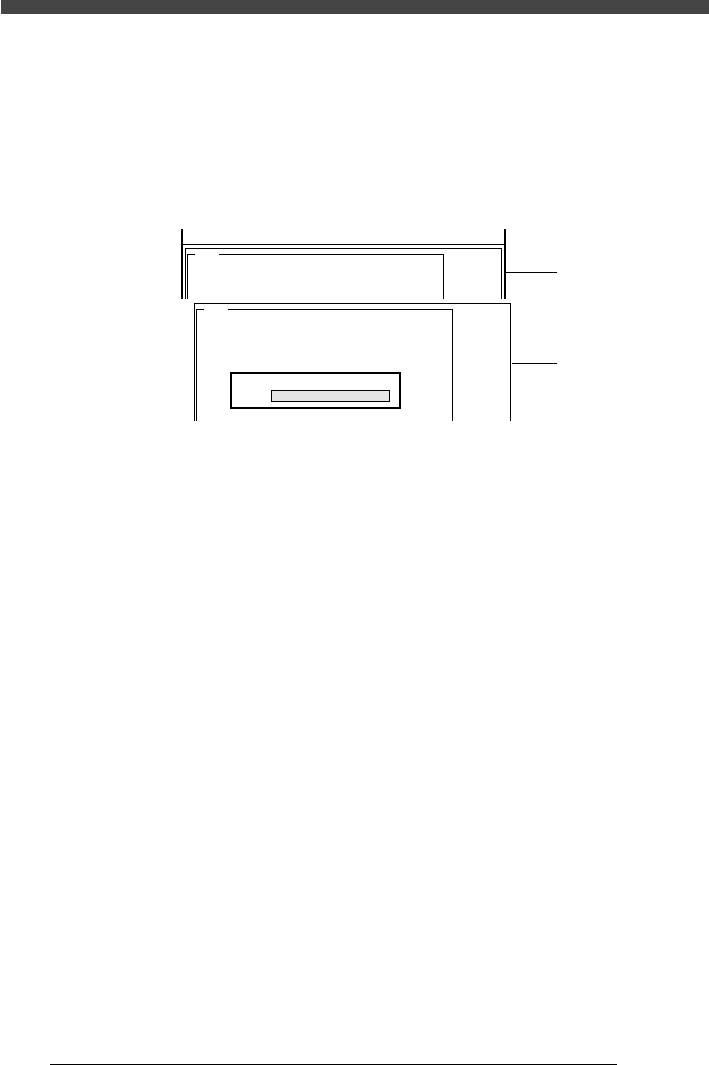
ズレ量を入力し、[ENTER]キーを押します。
Step 1 の評価結果を基に、「0 度」と「180 度」搭載での傾き角度を入力して
ください。ここでは、「90 度」と「-90 度」では搭載していませんので入力し
ません。
6043723-00
<<モード>> 3/マシン調整
A574
ビジョン認識では搭載した部品の搭載角度毎の補正値を修正
します。この調整は部品を調整用のテストボード上へ、QFPモード
にて・・・
A588
角度補正量を、下の編集ウインドウに入力してください。
認識装置: ビジョン
ヘッド番号: 1
角度は・・・
ビジョン
補正量
0.00 0.00 0.00
0度180度 -90度
0.00
90度
Step 4
Step 3
5
入力した値を確認して、再度 [ENTER]キーを押します。
入力値に基づいて、自動的に補正値が計算されます。
6
調整結果を保存します。
「B2 調整後データ保存」または「B0 データ保存後終了」を選択実行してくだ
さい。(保存したくない場合は、「B3 調整前データ復活」または「B7 強制終
了」を選択実行してください。)
7
搭載フィードバックによる微調整の効果を確認します。
再び基板に部品を搭載して、実装状態を確認してください。
傾き角度が0 になるまで、上記手順を繰り返してください。
8
傾き角度が0 になったら、調整を終了します。
引き続き、レーザー認識による搭載フィードバックに移ります。